Clear Sky Science · pt
Imagem tridimensional coerente por flash com precisão submilimétrica em matrizes grandes
Vendo a profundidade com detalhe incrível
Imagine uma câmera que não apenas vê o mundo em três dimensões, mas mede distâncias com tanta precisão que consegue detectar variações menores que a espessura de um cartão de crédito a dezenas de metros de distância. É isso que os pesquisadores por trás deste trabalho construíram: um novo tipo de câmera 3D a laser que combina longo alcance, precisão de profundidade muito fina e possibilidade de escalar para muitos mais pixels. Uma ferramenta assim pode ajudar a monitorar deslocamentos minúsculos em pontes ou edifícios, preservar obras de arte delicadas em forma digital e tornar cenas de realidade virtual muito mais realistas.

Por que medir distância é tão difícil
Carros modernos, robôs e sistemas de mapeamento dependem cada vez mais de LiDAR, um método que ilumina uma cena com laser e mede quanto tempo a luz demora para retornar, construindo uma imagem 3D. Muitos sistemas atuais direcionam um feixe estreito de laser com espelhos móveis, o que limita a velocidade e a confiabilidade. Abordagens em estado sólido sem partes móveis estão surgindo, mas ainda enfrentam compromissos: projetos que direcionam feixes eletronicamente podem ser difíceis de escalar e frequentemente levam muito tempo para escanear, enquanto detectores de fótons únicos altamente sensíveis têm dificuldade para formar matrizes grandes, com baixo ruído e boa precisão de profundidade. Chips de câmera convencionais conhecidos como CCDs já oferecem enorme número de pixels, mas quando usados em sistemas 3D normalmente dependem de truques de temporização grosseiros que só resolvem distâncias com precisão de alguns centímetros.
Uma nova maneira de usar luz e rádio juntos
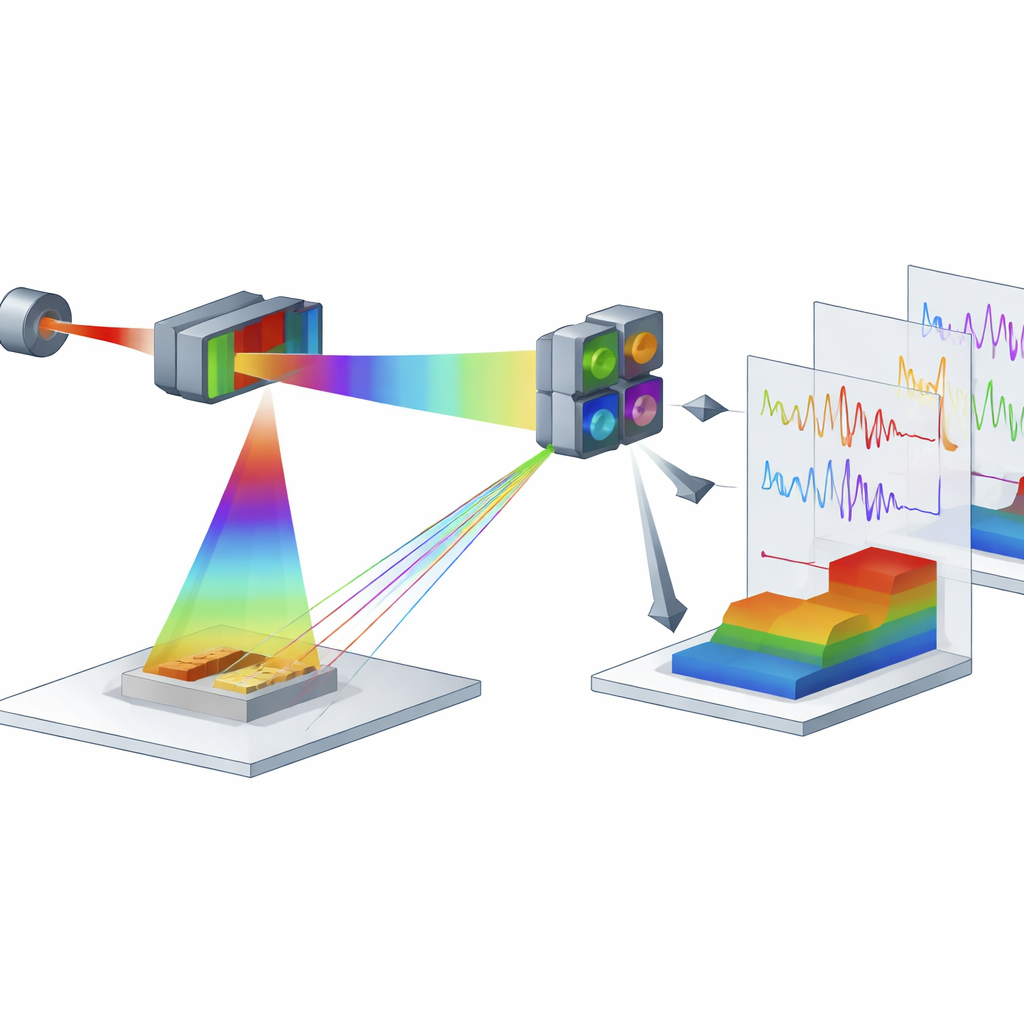
Os autores apresentam uma estratégia diferente que une a maturidade da tecnologia CCD com uma técnica conhecida como detecção coerente, amplamente usada em comunicações por fibra óptica de alta velocidade. Em vez de disparar pulsos curtos de laser, eles iluminam continuamente com um laser cuja intensidade é ritmicamente modulada por um sinal de radiofrequência que percorre muitas frequências estreitamente espaçadas ao longo do tempo. Parte dessa luz modulada inunda a cena como uma “sonda”, enquanto outra parte é mantida como uma “referência local”. No receptor, um conjunto óptico combina a luz fraca que retorna de cada ponto da cena com a luz de referência mais forte e alimenta o resultado em quatro câmeras CCD sincronizadas que atuam em conjunto como um único “sensor de imagem coerente”. Em cada pixel, a mistura da sonda e da referência codifica a distância como um padrão sutil no sinal registrado.
Transformando cintilações em uma imagem 3D
Durante uma varredura completa das frequências de rádio, cada pixel do CCD registra uma sequência de valores de brilho ao longo de milhares de quadros. Sozinhas, essas imagens brutas mostram quase nada — a luz retornada é muito mais fraca que a referência. Mas quando os pesquisadores aplicam um algoritmo de processamento personalizado, eles extraem um pequeno componente oscilante no sinal de cada pixel. A frequência dessa oscilação está diretamente ligada à distância daquele ponto na cena até a câmera. Ao executar uma análise de frequência, o sistema converte a série temporal de cada pixel em uma medição de distância precisa, empilhando essas medidas em um mapa 3D detalhado. Em testes com um alvo em forma de escada a 30,5 metros, a câmera distinguiu claramente degraus de apenas 5 milímetros de altura e reconstruíu a superfície completa em três dimensões usando todos os 320 × 256 pixels.
Testando cenas reais e empurrando os limites
Para demonstrar o que o sistema pode fazer na prática, a equipe imageou uma cena de trânsito em miniatura contendo um carro, um pedestre e mobiliário urbano à mesma distância de 30,5 metros. Com apenas algumas dezenas de miliwatts de potência óptica, a câmera recuperou um modelo 3D nítido no qual objetos individuais, suas sombras e características na escala de milímetros eram visíveis. Usando um alvo plano, eles mediram uma precisão de profundidade de apenas 0,47 milímetros — pelo menos dez vezes melhor do que muitos outros projetos de LiDAR em estado sólido. Também exploraram como o desempenho varia com o número de quadros usados, encontrando um compromisso entre velocidade e precisão: capturas mais rápidas dão profundidade mais aproximada, enquanto aquisições mais longas refinam as medições. O sistema se mostrou robusto mesmo quando turbulência de ar foi introduzida no caminho óptico, e conseguiu reconstruir objetos movendo-se lateralmente a até 300 milímetros por segundo ao reduzir o tempo de exposição.
De estátuas a futuros mundos digitais
Além de padrões de teste, os pesquisadores usaram a câmera para escanear um busto escultórico a partir de oito ângulos de visão, cada um a mais de 30 metros de distância. Ao costurar essas vistas, construíram um modelo virtual realista que pode ser girado e examinado de qualquer direção. Como a técnica pode, em princípio, operar no comprimento de onda visível e compartilhar hardware com imagem convencional, ela abre a porta para dispositivos que capturem ao mesmo tempo fotografias coloridas detalhadas e mapas de profundidade ultraprécisos. Embora o protótipo atual seja limitado pela taxa de quadros de seus sensores CCD, chips de imagem mais rápidos e esquemas de amostragem mais inteligentes poderiam aumentar a velocidade dramaticamente. Em termos simples, este trabalho mostra que, ao combinar de forma engenhosa modulação no estilo rádio com tecnologia de câmera familiar, é possível ver o mundo 3D a longa distância com precisão submilimétrica — um avanço com implicações amplas para monitoramento, mapeamento e experiências digitais imersivas.
Citação: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
Palavras-chave: Imagem 3D, LiDAR, senso de profundidade, detecção coerente, câmeras CCD