Clear Sky Science · tr
Dış referans ve duruş ölçümü olmadan hareketli nesnelerin 3B koordinat tanımlamasında matematiksel modelleme ile yapay zekayı birleştirmek
Neden hareketli nesnelerin 3B olarak izlenmesi önemli
Şehir hava sahasındaki dronlardan uzak bölgelerdeki yaban hayatına kadar, birçok modern görev hızlı hareket eden nesnelerin üç boyutta nerede olduğunu bilmeyi gerektirir. Bugün bu genellikle maliyetli uydu alıcıları veya dikkatle kalibre edilmiş araçlar gerektirir. Bu çalışma, yalnızca birkaç sıradan kamera ve akıllı algoritmalar kullanarak uçan bir nesneyi 3B olarak izlemenin bir yolunu tanıtıyor; bu da daha ucuz ve daha esnek izleme sistemlerinin yolunu açıyor.
Donanımı ölçmek yerine hareketi görmek
Geleneksel 3B konumlandırma araçları iki gruba ayrılır. Uydu navigasyonu veya yerleşik sensörler gibi aktif sistemler, izlenen nesnenin ekipman taşımasını gerektirir; bu, bilinmeyen veya işbirliği yapmayan hedefler için mümkün değildir. Lazer tarayıcılar veya radar gibi pasif sistemler hedefe dokunmaz ancak sensörlerin nereye baktığını bilmek için pahalı donanıma veya referans işaretlerine dayalıdır. Yazarlar farklı bir yol izliyor. Her kameranın eğimi ve dönüşünü önceden ölçmek yerine, hareket eden bir nesnenin zaman içinde kaydedilmiş pozisyon dizisinin kendisinin doğal bir referans olarak hizmet edebileceğini fark ediyorlar. Birkaç kamera aynı nesneyi uçarken izlerse, o yolun paylaşılan şekli onların görüşlerini birbirine bağlar.
2B kamera görüntülerini ortak bir 3B yola dönüştürmek
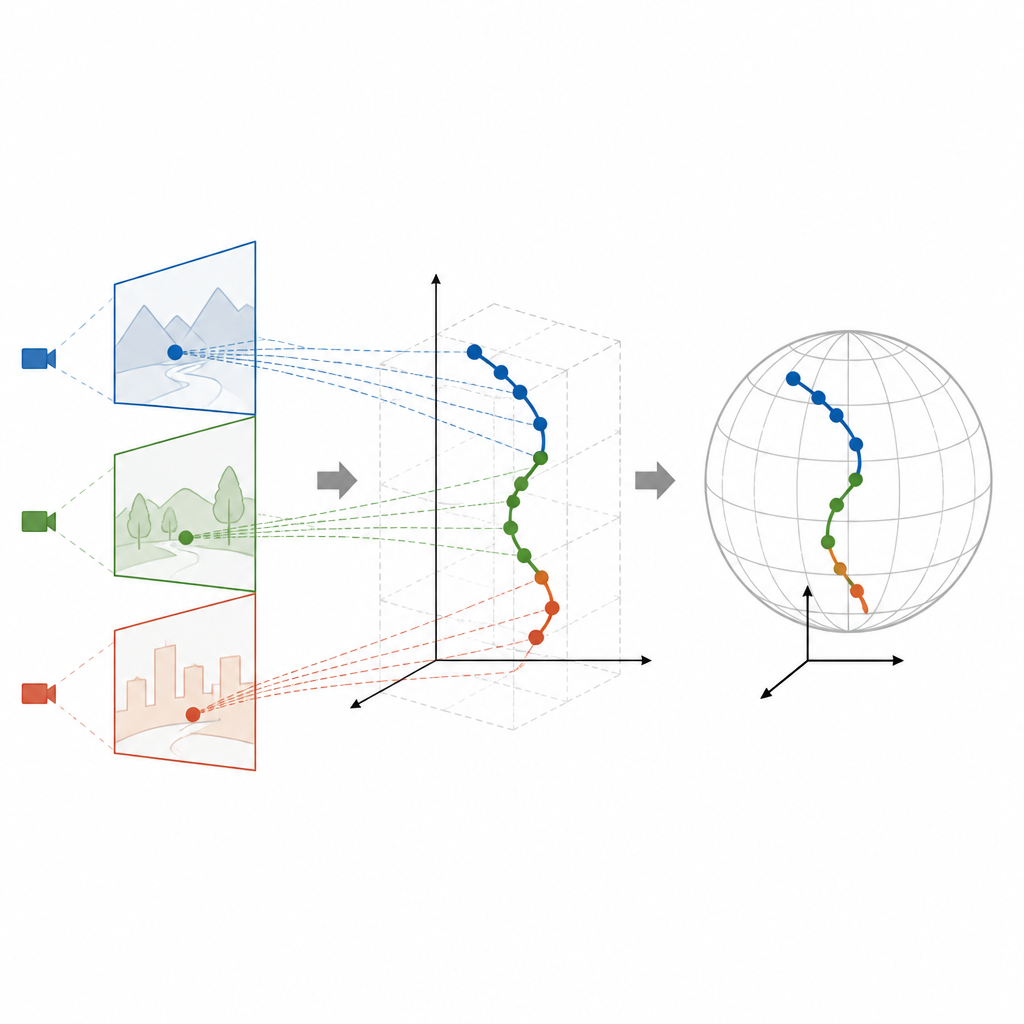
Ekip, yapay zekayı klasik geometri ile harmanlayan iki aşamalı bir çerçeve kuruyor. Önce, You Only Look Once (YOLOv12) ailesinin en son sürümüne dayanan bir AI dedektörü her video karesini tarar ve dronu basit bir kutu ile işaretler; buradan piksel koordinatları alınır. Her kareyi ayrı ayrı ele almak yerine, yazarlar modeli zaman farkında bir sürüme, YOLO Time Series olarak genişletiyor. Bu sürüm, dronun kareden kareye nasıl hareket ettiğine ve tipik hızına bakarak kaçırılan gözlemleri tamamlıyor ve kuşlar veya böcekler gibi sahte hedefleri filtreliyor. Üç kameradan elde edilen bu uzun, temizlenmiş 2B nokta izleri 3B yolun yeniden oluşturulması için ham malzeme oluyor.
Matematiğin gizli kamera pozlarını geri kazanmasına izin vermek
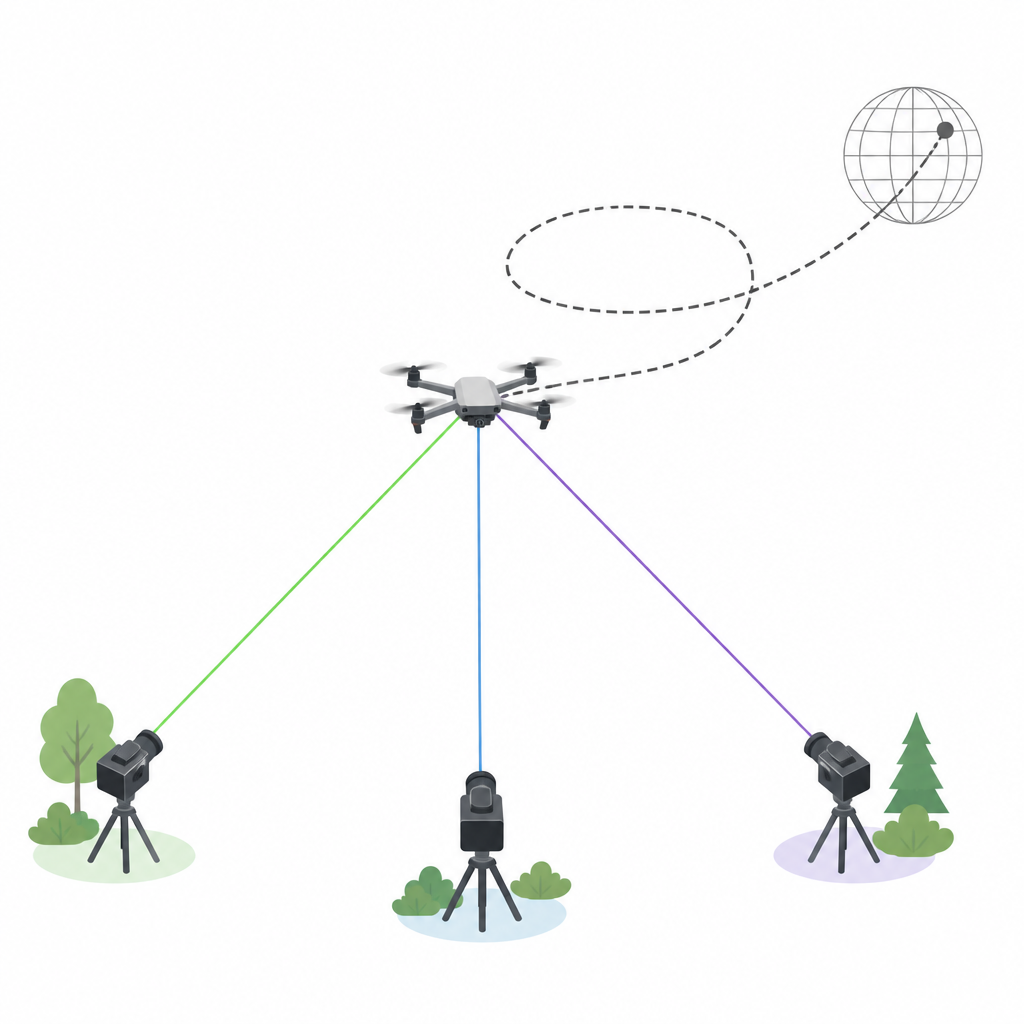
İkinci aşamada yazarlar, farklı kamera görünümlerini ilişkilendirmek için tekil değer ayrıştırması (singular value decomposition) olarak bilinen kompakt bir matematiksel araç uyguluyor. Başlangıçtaki bir toplu dönemde yüzlerce kare toplanıyor. Bir kamera çiftinden gelen ortak 2B izler, bu kameraların yönlerinin hiç ölçülmemiş olmasına rağmen birbirlerine göre nasıl döndürüldüğünü ve kaydırıldığını ortaya koyuyor. Bu görece düzen elde edildiğinde, sistem basit geometrik kuralları kullanarak dronun her anki 3B konumunu bir referans kameranın koordinat sisteminde üçgenleme yoluyla hesaplıyor. Kameraların sadece yerde nerede konumlandığını küresel bir referans çerçevesinde bilmek, yöntemin bu yerel 3B yolu dünya ölçeğindeki bir haritaya bağlamasını sağlıyor; böylece dronun hareketi gerçek mesafe ve yüksekliklerle ifade edilebiliyor.
Sanal ortamda ve gerçek bir dron üzerinde test
Fikrin sınırlarını kontrol etmek için araştırmacılar önce üç sabit kameranın üzerindeki bir spiral yolunu izleyen bir dronun ayrıntılı simülasyonlarını çalıştırıyor. Bu idealize denemelerde çerçeveleri birkaç milimetre hatayla 3B koordinatları geri kazanıyor ve daha fazla test, kamera yerleştirme veya piksel tespitindeki hataların doğruluğu nasıl kademeli olarak düşürdüğünü gösteriyor. Bu tür kusurlar eklendiğinde bile, tipik kamera aralıkları ve görüntü kalitesi için hatalar mütevazı kalıyor. Ekip daha sonra bir spor stadyumunda saha testi yapıyor; üç ticari akıllı telefon kullanarak 100 x 100 x 30 metre hacmindeki gerçek bir dronu izliyor. Yeniden oluşturulan yolları dronun yerleşik uydu alıcısıyla karşılaştırdıklarında ortalama yaklaşık beş metre hata ve iki yolun şekilleri arasında yüksek bir uyum rapor ediyorlar; bu, yağmurlu ve düşük ışıklı koşullar altında bile geçerli oluyor.
Günlük 3B izleme için bunun anlamı
Basitçe söylemek gerekirse, bu çalışma birkaç ucuz kamerayı ne hedefe ne de kameralara hassas aletler monte etmeden hareketli nesneler için gerçek zamanlı bir 3B konumlayıcıya dönüştürebileceğinizi gösteriyor. Nesnenin hareketinin görüşleri birbirine bağlamasına izin vererek ve öğrenmeye dayalı tespiti yalın matematiksel formüllerle birleştirerek, çerçeve sınırlı donanımla hızlı ve makul ölçüde doğru 3B konumlar sunuyor. Tek bir dron üzerinde gösterilmiş olsa da, aynı ilkeler diğer uçan nesnelere veya hatta yer tabanlı hedeflere de genişletilebilir ve daha basit araçlarla değişen Dünyayı gözlemlemenin yeni yollarını sunabilir.
Atıf: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Anahtar kelimeler: 3B izleme, dron izleme, bilgisayarla görme, çok kameralı sistem, jeodezik konumlandırma