Clear Sky Science · fr
Combiner modélisation mathématique et IA pour la reconnaissance des coordonnées 3D d’objets en mouvement sans référence externe ni mesure d’attitude
Pourquoi le suivi d’objets en mouvement en 3D est important
Des drones dans l’espace aérien urbain à la faune dans les cieux isolés, de nombreuses missions modernes exigent de connaître la position d’objets rapides en trois dimensions. Aujourd’hui, cela nécessite généralement des récepteurs satellites coûteux ou des instruments soigneusement calibrés. Cette étude présente une méthode pour suivre un objet volant en 3D en n’utilisant que quelques caméras ordinaires et des algorithmes intelligents, ouvrant la voie à des systèmes de surveillance moins chers et plus flexibles.
Voir le mouvement plutôt que mesurer le matériel
Les outils traditionnels de positionnement 3D se répartissent en deux catégories. Les systèmes actifs, comme la navigation par satellite ou les capteurs embarqués, exigent que l’objet suivi porte du matériel, ce qui n’est pas possible pour des cibles inconnues ou non coopératives. Les systèmes passifs, tels que les scanners laser ou le radar, ne nécessitent pas de contact avec la cible mais reposent sur du matériel coûteux ou des repères de référence pour connaître l’orientation des capteurs. Les auteurs empruntent une voie différente. Plutôt que de mesurer à l’avance l’inclinaison et la rotation de chaque caméra, ils constatent que la trajectoire d’un objet en mouvement, enregistrée comme une suite de positions dans le temps, peut elle-même servir de référence naturelle. Si plusieurs caméras observent le même objet pendant son vol, la forme partagée de cette trajectoire met en relation leurs vues.
Transformer des vues 2D de caméras en une trajectoire 3D commune
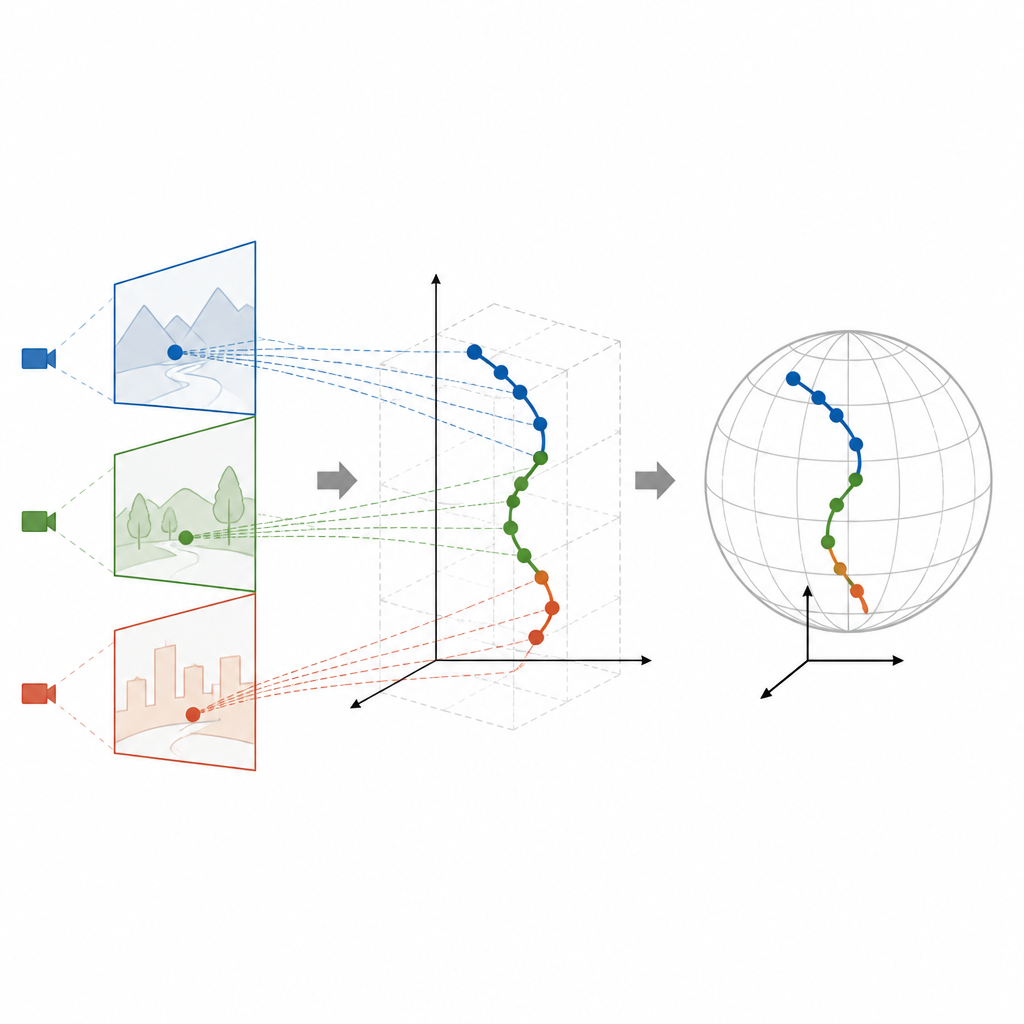
L’équipe construit un cadre en deux étapes qui mêle intelligence artificielle et géométrie classique. D’abord, un détecteur IA basé sur la dernière famille You Only Look Once (YOLOv12) scanne chaque image vidéo et entoure le drone d’un simple cadre, dont on extrait les coordonnées en pixels. Plutôt que de traiter chaque image indépendamment, les auteurs étendent le modèle en une version sensible au temps appelée YOLO Time Series. En analysant comment le drone se déplace d’une image à l’autre et en utilisant sa vitesse typique, cette version comble les détections manquées et filtre les imposteurs tels que les oiseaux ou les insectes. Ces longues pistes 2D nettoyées, issues de trois caméras, deviennent la matière première pour reconstruire la trajectoire 3D.
Laisser les mathématiques retrouver les poses cachées des caméras
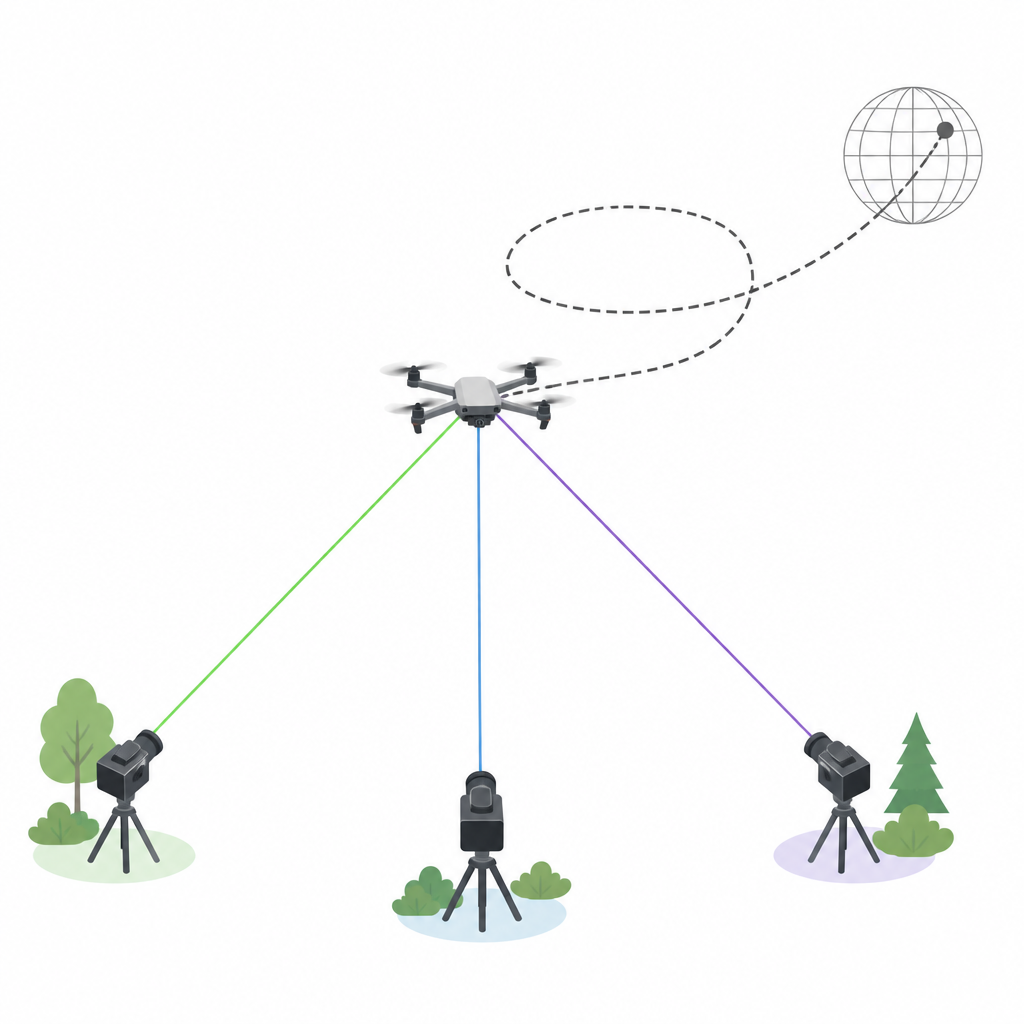
Dans la seconde étape, les auteurs appliquent un outil mathématique compact connu sous le nom de décomposition en valeurs singulières pour relier les différentes vues des caméras. Lors d’une période initiale d’accumulation, des centaines d’images sont collectées. Les traces 2D communes à une paire de caméras révèlent comment ces caméras sont pivotées et décalées l’une par rapport à l’autre, même si leurs orientations n’ont jamais été mesurées. Avec cette disposition relative en main, le système utilise des règles géométriques simples pour trianguler la position 3D du drone à chaque instant dans le système de coordonnées d’une caméra de référence. En ne connaissant que l’emplacement des caméras au sol dans un repère global, la méthode relie alors cette trajectoire 3D locale à une carte à l’échelle du monde, de sorte que le mouvement du drone puisse être exprimé en distances et altitudes réelles.
Tests en espace virtuel et sur un vrai drone
Pour vérifier les limites de l’idée, les chercheurs exécutent d’abord des simulations détaillées d’un drone suivant une trajectoire en spirale au‑dessus de trois caméras fixes. Dans ces essais idéalisés, leur cadre reconstruit les coordonnées 3D avec des erreurs de l’ordre de quelques millimètres, et des tests supplémentaires montrent comment des erreurs dans le placement des caméras ou la détection de pixels dégradent progressivement la précision. Même quand de telles imperfections sont introduites, les erreurs restent modestes pour des espacements de caméras et une qualité d’image typiques. L’équipe mène ensuite un essai sur le terrain dans un stade, suivant un drone réel dans un volume de 100 par 100 par 30 mètres en utilisant trois smartphones grand public. En comparant leur trajectoire reconstruit e avec le récepteur satellite embarqué du drone, ils signalent une erreur moyenne d’environ cinq mètres et un fort accord entre les formes des deux trajectoires, même sous la pluie et en faible luminosité.
Ce que cela signifie pour le suivi 3D au quotidien
En termes simples, ce travail montre qu’il est possible de transformer une poignée de caméras bon marché en un localisateur 3D en temps réel pour des objets en mouvement sans fixer d’instruments de précision aux caméras ni à la cible. En laissant le mouvement de l’objet lier les vues entre elles, et en combinant la détection basée sur l’apprentissage avec des formules mathématiques légères, le cadre fournit des positions 3D rapides et raisonnablement précises avec un matériel limité. Bien que démontré sur un seul drone, les mêmes principes pourraient s’étendre à d’autres objets volants ou même à des cibles au sol, offrant de nouvelles façons d’observer la Terre changeante avec des outils plus simples.
Citation: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Mots-clés: suivi 3D, surveillance de drone, vision par ordinateur, système multi-caméras, positionnement géodésique