Clear Sky Science · pl
Połączenie modelowania matematycznego i AI w rozpoznawaniu 3D współrzędnych poruszających się obiektów bez zewnętrznych odniesień i pomiaru orientacji
Dlaczego śledzenie poruszających się obiektów w 3D ma znaczenie
Od dronów w przestrzeni miejskiej po dzikie ptactwo na odległych nieboskłonach — wiele współczesnych zadań wymaga znajomości położenia szybko poruszających się obiektów w trzech wymiarach. Dziś zwykle wymaga to drogich odbiorników satelitarnych lub starannie skalibrowanych przyrządów. W niniejszym badaniu przedstawiono sposób na śledzenie latającego obiektu w 3D przy użyciu jedynie kilku zwykłych kamer i zaawansowanych algorytmów, co otwiera drogę do tańszych i bardziej elastycznych systemów monitoringu.
Obserwować ruch zamiast mierzyć sprzęt
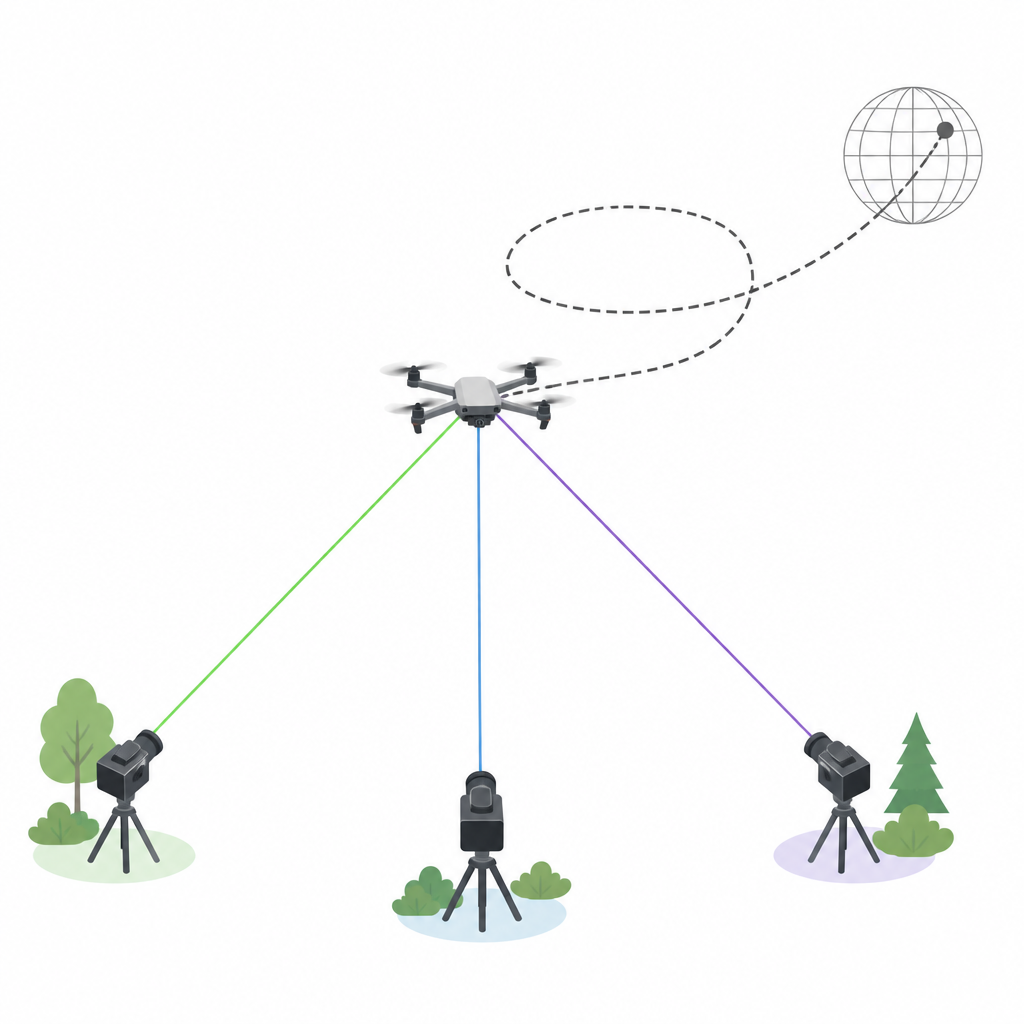
Tradycyjne narzędzia pozycjonowania 3D dzielą się na dwie kategorie. Systemy aktywne, takie jak nawigacja satelitarna czy czujniki pokładowe, wymagają, aby śledzony obiekt nosił przyrządy — co nie zawsze jest możliwe w przypadku nieznanych lub niechętnych do współpracy celów. Systemy pasywne, jak skanery laserowe czy radar, nie dotykają celu, lecz polegają na drogim sprzęcie lub znacznikach referencyjnych, by wiedzieć, dokąd są skierowane sensory. Autorzy podążają inną drogą. Zamiast uprzednio mierzyć dokładne pochylenie i obrót każdej kamery, zauważają, że tor poruszającego się obiektu, zapisany jako sekwencja pozycji w czasie, może sam w sobie posłużyć za naturalne odniesienie. Jeśli kilka kamer obserwuje ten sam obiekt w locie, wspólny kształt tej ścieżki łączy ich widoki.
Przekształcanie widoków 2D w wspólną ścieżkę 3D
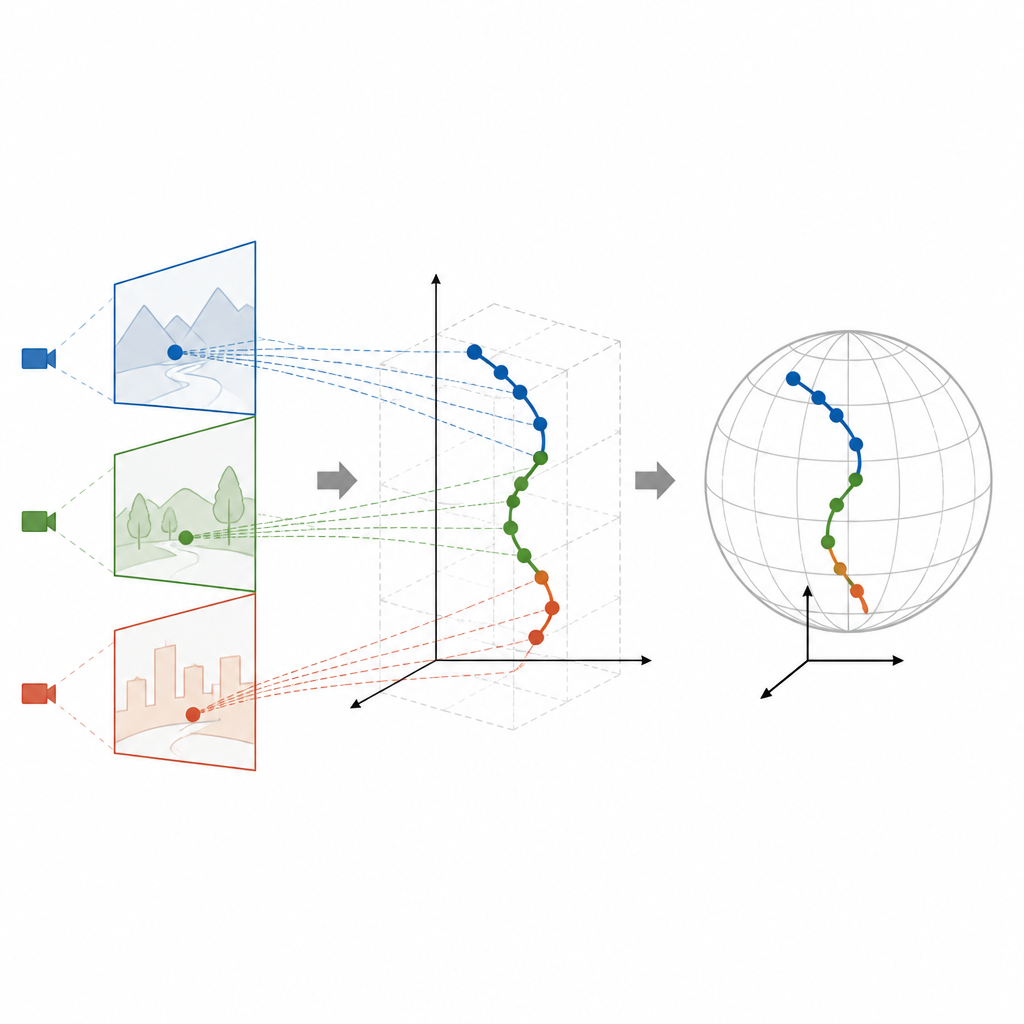
Zespół buduje dwustopniowe rozwiązanie łączące sztuczną inteligencję z klasyczną geometrią. Najpierw detektor AI z rodziny You Only Look Once (YOLOv12) skanuje każdy fram wideo i oznacza drona prostym prostokątem, z którego pobiera się współrzędne pikseli. Zamiast traktować każdą klatkę oddzielnie, autorzy rozszerzają model o wersję uwzględniającą czas, nazwaną YOLO Time Series. Patrząc na to, jak dron porusza się między klatkami i wykorzystując jego typową prędkość, ta wersja uzupełnia pominięte wykrycia i odfiltrowuje podrabiane obiekty, takie jak ptaki czy owady. Te długie, oczyszczone ślady punktów 2D z trzech kamer stają się surowym materiałem do rekonstrukcji ścieżki 3D.
Pozwolić matematyce odzyskać ukryte położenia kamer
W drugim etapie autorzy stosują zwarte narzędzie matematyczne znane jako rozkład wartości osobliwych (singular value decomposition), aby powiązać różne widoki kamer. Podczas początkowego okresu zbierania danych gromadzone są setki klatek. Wspólne 2D-owe ślady z pary kamer ujawniają, jak te kamery są obrócone i przesunięte względem siebie, mimo że ich kierunki nigdy nie były mierzone. Mając taką względną konfigurację, system wykorzystuje proste reguły geometryczne do triangulacji pozycji 3D drona w każdym momencie w układzie współrzędnych jednej kamery referencyjnej. Znając jedynie położenie kamer na ziemi w globalnym układzie odniesienia, metoda łączy tę lokalną ścieżkę 3D z mapą w skali świata, dzięki czemu ruch drona można wyrazić w rzeczywistych odległościach i wysokościach.
Testy w przestrzeni wirtualnej i na prawdziwym dronie
Aby sprawdzić granice pomysłu, badacze najpierw przeprowadzili szczegółowe symulacje lotu drona po spirali nad trzema nieruchomymi kamerami. W tych idealizowanych próbach ich system odtwarza współrzędne 3D z błędami rzędu zaledwie kilku milimetrów, a dalsze testy pokazują, jak błędy w umiejscowieniu kamer lub wykrywaniu pikseli stopniowo pogarszają dokładność. Nawet przy wprowadzeniu takich niedoskonałości błędy pozostają umiarkowane dla typowych odstępów między kamerami i jakości obrazu. Zespół następnie przeprowadza test terenowy na stadionie sportowym, śledząc prawdziwy dron w objętości 100 na 100 na 30 metrów przy użyciu trzech dostępnych w handlu smartfonów. Porównując zrekonstruowaną ścieżkę z odbiornikiem satelitarnym drona, zgłaszają średni błąd około pięciu metrów oraz wysokie podobieństwo kształtów obu ścieżek, nawet w deszczu i przy słabym oświetleniu.
Co to znaczy dla codziennego śledzenia 3D
Mówiąc prosto, praca ta pokazuje, że można zamienić garść niedrogich kamer w system lokalizujący obiekty w 3D w czasie rzeczywistym, bez montowania precyzyjnych przyrządów ani na kamerach, ani na śledzonym obiekcie. Pozwalając, by ruch obiektu powiązał widoki, i łącząc detekcję opartą na uczeniu z oszczędnymi formułami matematycznymi, ramy te dostarczają szybkie i stosunkowo dokładne pozycje 3D przy ograniczonym sprzęcie. Choć zaprezentowano rozwiązanie dla pojedynczego drona, te same zasady można zastosować do innych obiektów latających, a nawet celów naziemnych, oferując nowe sposoby obserwacji zmieniającej się Ziemi przy użyciu prostszych narzędzi.
Cytowanie: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Słowa kluczowe: śledzenie 3D, monitorowanie dronów, widzenie komputerowe, system wielokamerowy, pozycjonowanie geodezyjne