Clear Sky Science · ja
外部参照や姿勢測定なしで移動物体の3次元座標を認識するための数理モデリングとAIの橋渡し
なぜ移動物体の3次元追跡が重要か
都市上空のドローンから人里離れた空域の野生動物まで、多くの現代的な課題は高速で移動する対象の三次元位置を把握することに依存しています。今日では通常、高価な衛星受信機や精密に較正された機器が必要です。本研究は、いくつかの普通のカメラと賢いアルゴリズムだけで飛行物体を3次元で追跡する方法を提示し、より安価で柔軟な監視システムの可能性を開きます。
ハードウェアを測るのではなく動きを見る
従来の3次元測位手段は大きく二つに分かれます。衛星航法や搭載センサーのような能動システムは、対象に機器を搭載する必要があり、未知または非協力的な対象には使えません。レーザースキャナやレーダーのような受動システムは対象に触れませんが、どこを向いているかを知るために高価な機材や基準マーカーに頼ります。著者らは別の道を選びます。事前に各カメラの正確な傾きや回転を測る代わりに、時間に沿って記録された移動物体の軌跡自体が自然な参照となり得ることに着目したのです。複数のカメラが同じ物体を飛行中に観測すれば、その共通する軌跡の形状が視点同士を結びつけます。
2次元カメラ映像を共有の3次元経路に変える
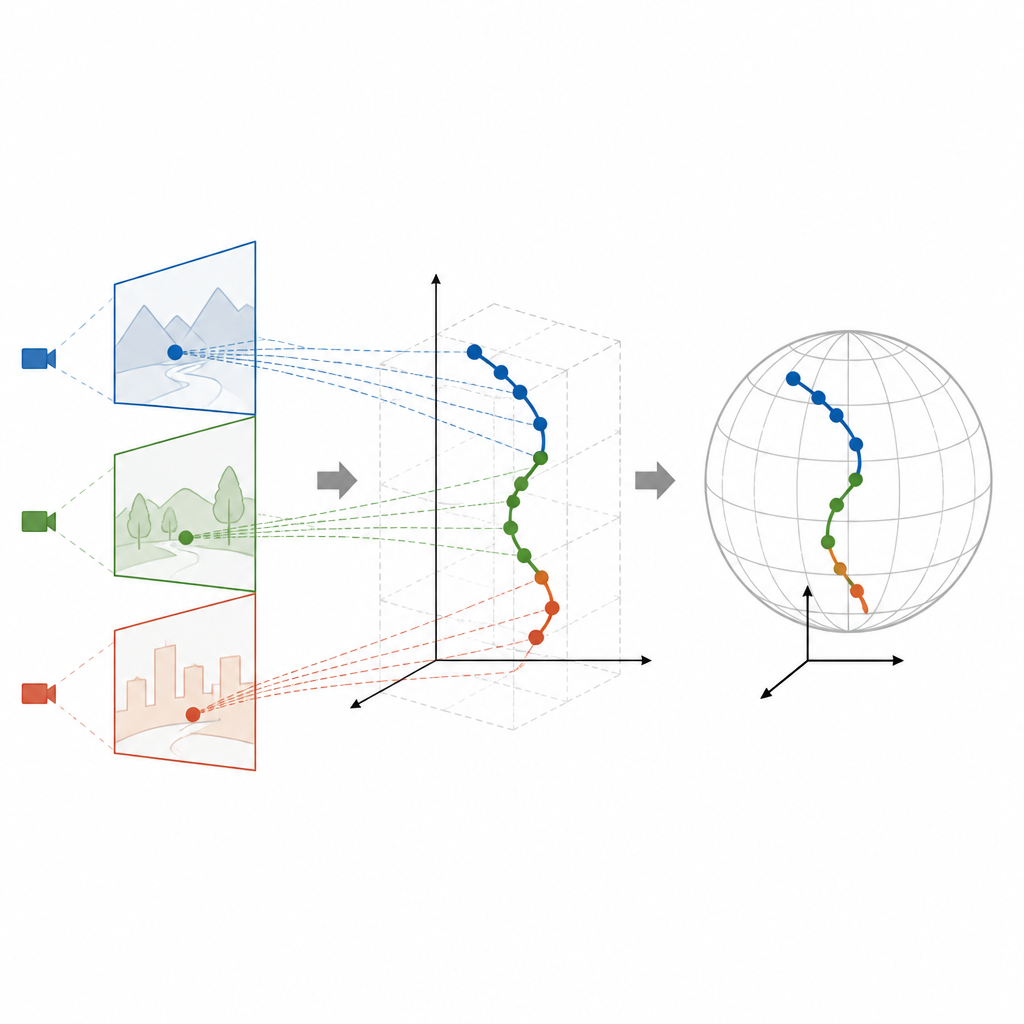
研究チームは人工知能と古典的幾何を融合する二段階の枠組みを構築します。まず、最新のYou Only Look Once(YOLOv12)系に基づくAI検出器が各ビデオフレームを走査し、ドローンを単純な箱でマークしてピクセル座標を取得します。各フレームを個別に扱う代わりに、著者らはモデルを時間依存版のYOLO Time Seriesへ拡張しました。フレーム間のドローンの動きと典型的な速度を参照することで、この版は見逃しを補完し、鳥や昆虫などの誤検出を除去します。こうして得られた三台のカメラからの長く洗練された2次元点列が、3次元経路再構築の原材料となります。
数学により隠れたカメラ姿勢を復元する
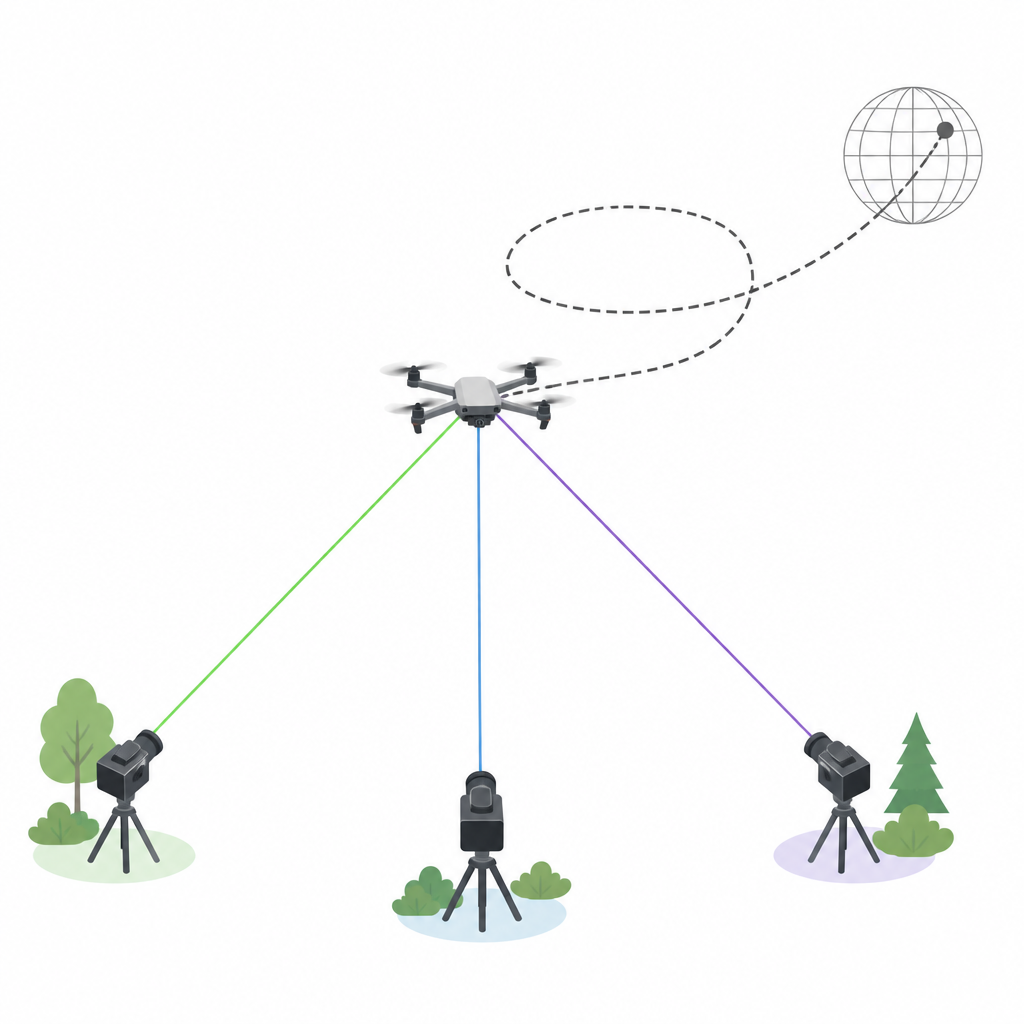
第2段階では、著者らは特異値分解として知られるコンパクトな数学的手法を適用して異なるカメラ視点を関連付けます。初期のバッチ期間に数百フレームが収集されます。カメラ対から得られる共有の2次元軌跡は、それらのカメラが互いにどのように回転しずれているかを示し、向きが事前に測定されていなくても関係が明らかになります。この相対配置を得た上で、システムは単純な幾何学則を用いて各時点でのドローンの3次元位置を基準カメラの座標系で三角測量します。地上に配置されたカメラの位置を世界座標系で知っているだけで、この局所的な3次元経路を実世界の尺度に結び付け、移動を実際の距離と高さで表現できます。
仮想空間と実機ドローンでの試験
考え方の限界を確かめるため、研究者らはまず三台の固定カメラ上空でスパイラル軌道を飛行するドローンの詳細なシミュレーションを実行します。これらの理想化された試験では、枠組みは3次元座標を数ミリメートル程度の誤差で復元し、さらにカメラ配置やピクセル検出の誤差がどのように精度を徐々に低下させるかを示します。不完全さが導入されても、典型的なカメラ間隔と画像品質では誤差は控えめに留まります。続いて、競技場でのフィールドテストを行い、市販のスマートフォン3台を用いて100×100×30メートルの空間内の実機ドローンを追跡しました。再構成された経路をドローン搭載の衛星受信機と比較すると、平均誤差は約5メートルであり、雨天や低照度条件でも二つの経路形状は高い一致を示しました。
日常的な3次元追跡にとっての意義
平たく言えば、本研究は精密機器をカメラや対象に取り付けることなく、数台の安価なカメラを移動物体のリアルタイム3次元位置検出器に変えられることを示しています。物体の動きを視点同士の結びつきに利用し、学習ベースの検出と簡潔な数学式を組み合わせることで、限られたハードウェアでも迅速で十分に正確な3次元位置を得られます。単一ドローンで実証されましたが、同じ原理は他の飛翔体や地上対象にも拡張でき、より簡素な道具で変化する地球を観測する新たな手段を提供するでしょう。
引用: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
キーワード: 3D追跡, ドローン監視, コンピュータビジョン, マルチカメラシステム, 測地位置決め