Clear Sky Science · nl
Een brug tussen wiskundige modellering en AI voor 3D-coördinatenherkenning van bewegende objecten zonder externe referentie en oriëntatiemetingen
Waarom het volgen van bewegende objecten in 3D ertoe doet
Van drones in stedelijk luchtruim tot wilde dieren in afgelegen luchten: veel moderne taken vereisen kennis van waar snel bewegende objecten zich in drie dimensies bevinden. Vandaag de dag betekent dat vaak dure satellietontvangers of zorgvuldig gekalibreerde instrumenten. Deze studie introduceert een manier om een vliegend object in 3D te volgen met alleen een paar gewone camera’s en slimme algoritmen, wat de deur opent naar goedkopere en flexibelere monitoringsystemen.
Beweging zien in plaats van hardware meten
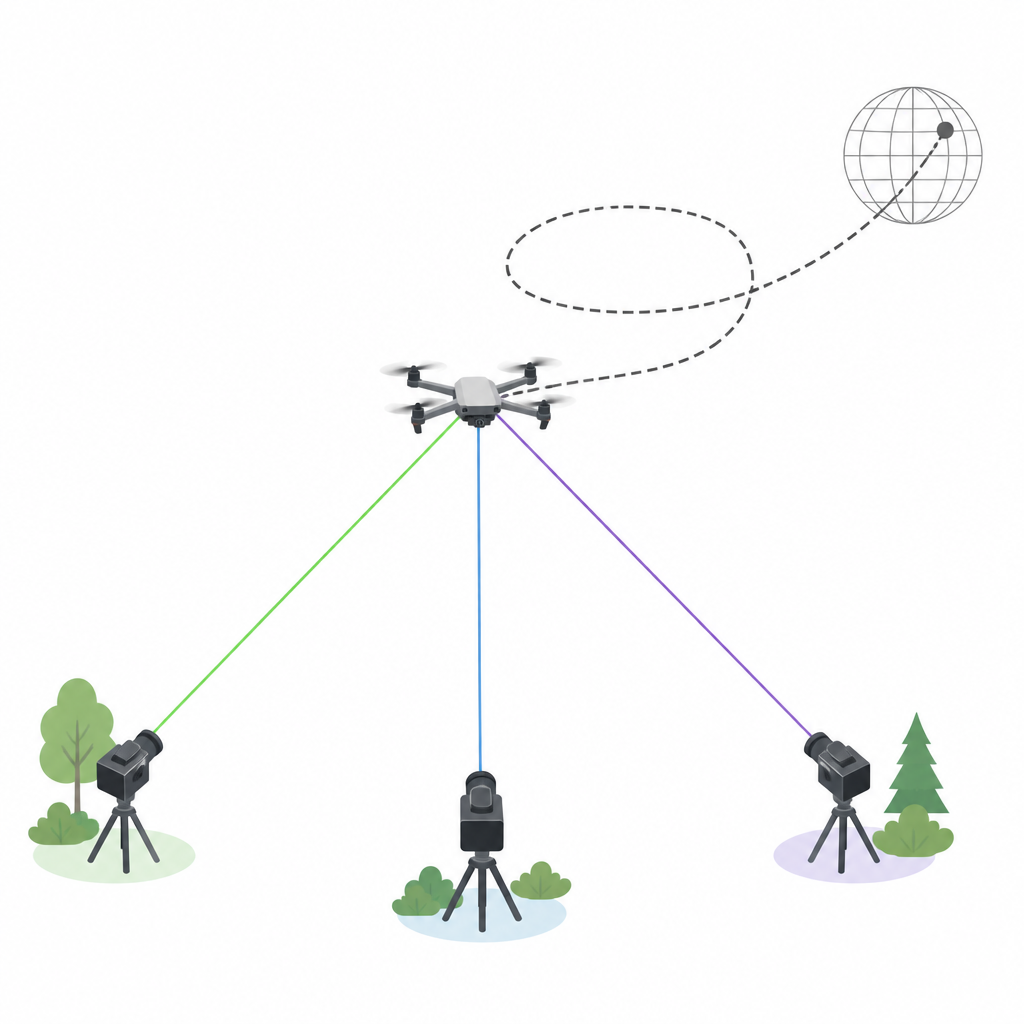
Traditionele 3D-positioneringstools vallen in twee groepen. Actieve systemen, zoals satellietnavigatie of aan boord gemonteerde sensoren, vereisen dat het te volgen object apparatuur draagt, wat niet mogelijk is bij onbekende of niet-samenwerkende doelen. Passieve systemen, zoals laserscanners of radar, raken het doel niet aan maar vertrouwen op dure apparatuur of referentiemarkeringen om te weten waar de sensoren op gericht zijn. De auteurs kiezen een andere route. In plaats van van tevoren de exacte helling en draaiing van elke camera te meten, merken ze op dat het pad van een bewegend object, vastgelegd als een reeks posities in de tijd, zelf als een natuurlijke referentie kan dienen. Als meerdere camera’s hetzelfde object volgen terwijl het vliegt, koppelt de gedeelde vorm van dat pad hun waarnemingen aan elkaar.
2D-cameraweergaven omzetten in een gedeeld 3D-pad
Het team bouwt een tweefasig kader dat kunstmatige intelligentie mengt met klassieke geometrie. Eerst scant een AI-detector uit de nieuwste You Only Look Once (YOLOv12)-familie elk videoframe en markeert de drone met een eenvoudige doos, waarvan de pixelcoördinaten worden afgelezen. In plaats van elk frame afzonderlijk te behandelen, breiden de auteurs het model uit tot een tijdsbewuste versie genaamd YOLO Time Series. Door te kijken hoe de drone zich van frame tot frame beweegt en door gebruik te maken van zijn typische snelheid, vult deze versie gemiste waarnemingen aan en filtert hij vals positieven zoals vogels of insecten weg. Deze lange, opgeschoonde sporen van 2D-punten uit drie camera’s vormen het ruwe materiaal voor het reconstrueren van het 3D-pad.
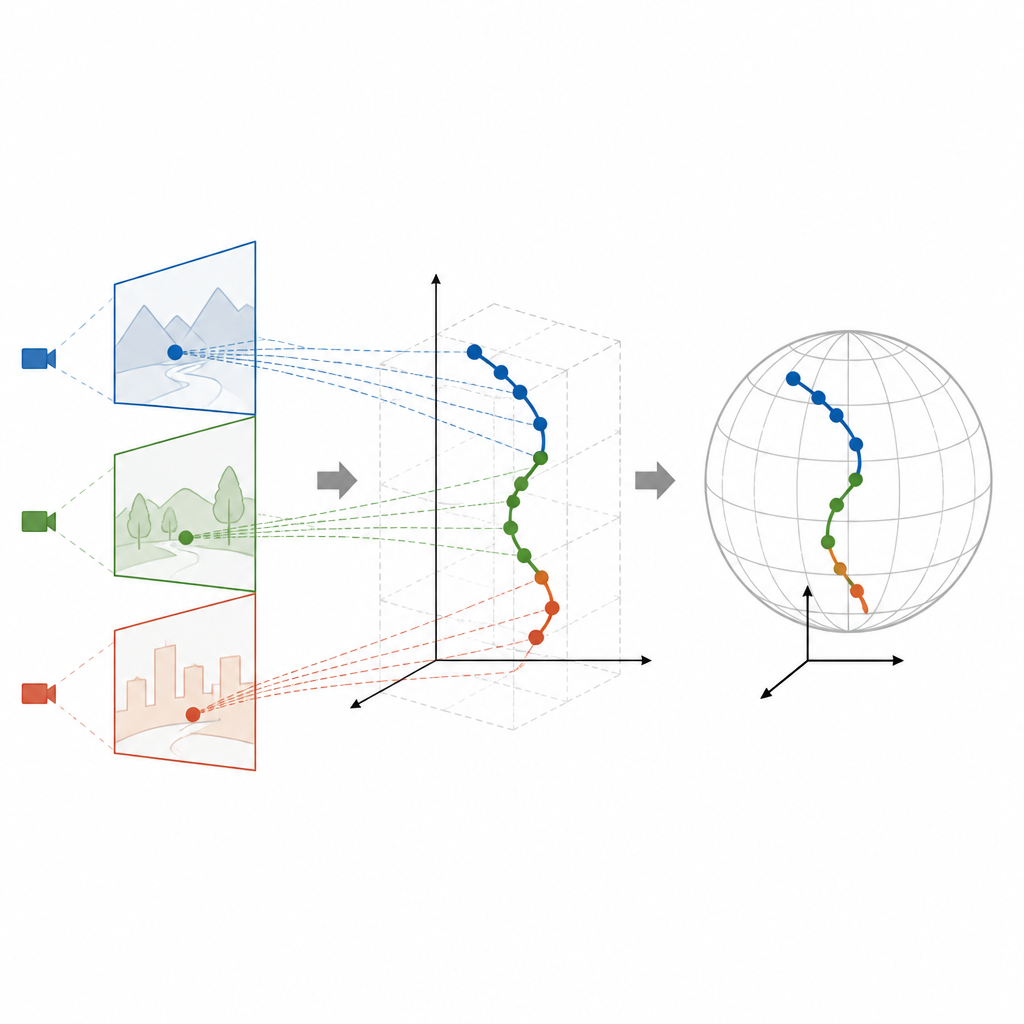
Wiskunde gebruiken om verborgen camerahoudingen te herstellen
In de tweede fase passen de auteurs een compact wiskundig hulpmiddel toe, bekend als singular value decomposition, om de verschillende camerazichten met elkaar te relateren. Tijdens een eerste batchperiode worden honderden frames verzameld. De gedeelde 2D-sporen van een camerapaar onthullen hoe die camera’s ten opzichte van elkaar geroteerd en verschoven zijn, ook al werden hun richtingen nooit gemeten. Met deze relatieve indeling in de hand gebruikt het systeem eenvoudige geometrische regels om de 3D-positie van de drone op elk moment te trianguleren in het coördinatenstelsel van één referentiecamera. Als alleen bekend is waar de camera’s op de grond staan in een globaal referentiekader, koppelt de methode dit lokale 3D-pad vervolgens aan een wereldschaalkaart, zodat de beweging van de drone in echte afstanden en hoogtes kan worden uitgedrukt.
Testen in virtuele ruimte en met een echte drone
Om de grenzen van het idee te onderzoeken, voeren de onderzoekers eerst gedetailleerde simulaties uit van een drone die een spiraalbaan boven drie vaste camera’s vliegt. In deze geïdealiseerde proeven herstelt hun kader de 3D-coördinaten met fouten van slechts enkele millimeters, en verdere tests tonen hoe fouten in cameraplaatsing of pixeldetectoren de nauwkeurigheid geleidelijk aantasten. Zelfs wanneer dergelijke onvolkomenheden worden geïntroduceerd, blijven de fouten beperkt voor typische cameraspatiëring en beeldkwaliteit. Het team voert daarna een veldtest uit in een sportstadion en volgt een echte drone binnen een volume van 100 bij 100 bij 30 meter met drie kant-en-klare smartphones. In vergelijking met de onboard satellietontvanger van de drone rapporteren ze een gemiddelde fout van ongeveer vijf meter en een hoge overeenstemming tussen de vormen van beide paden, zelfs bij regen en weinig licht.
Wat dit betekent voor alledaagse 3D-tracking
In gewone bewoordingen laat dit werk zien dat je een handvol goedkope camera’s kunt omzetten in een realtime 3D-locator voor bewegende objecten zonder precisie-instrumenten aan de camera’s of het doel te bevestigen. Door de beweging van het object de waarnemingen aan elkaar te laten binden, en door leer-gebaseerde detectie te combineren met slanke wiskundige formules, levert het kader snelle en redelijk nauwkeurige 3D-posities met beperkte hardware. Hoewel aangetoond op een enkele drone, kunnen dezelfde principes worden uitgebreid naar andere vliegende objecten of zelfs doelen op de grond, en bieden ze nieuwe manieren om de veranderende aarde met eenvoudigere instrumenten te observeren.
Bronvermelding: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Trefwoorden: 3D-tracking, dronebewaking, computer vision, multicamerasysteem, geodetische positionering