Clear Sky Science · ar
ردم الفجوة بين النمذجة الرياضية والذكاء الاصطناعي للتعرّف على إحداثيات ثلاثية الأبعاد لأجسام متحركة دون مرجع خارجي أو قياس الوضعية
لماذا يهم تتبّع الأجسام المتحركة في ثلاثي الأبعاد
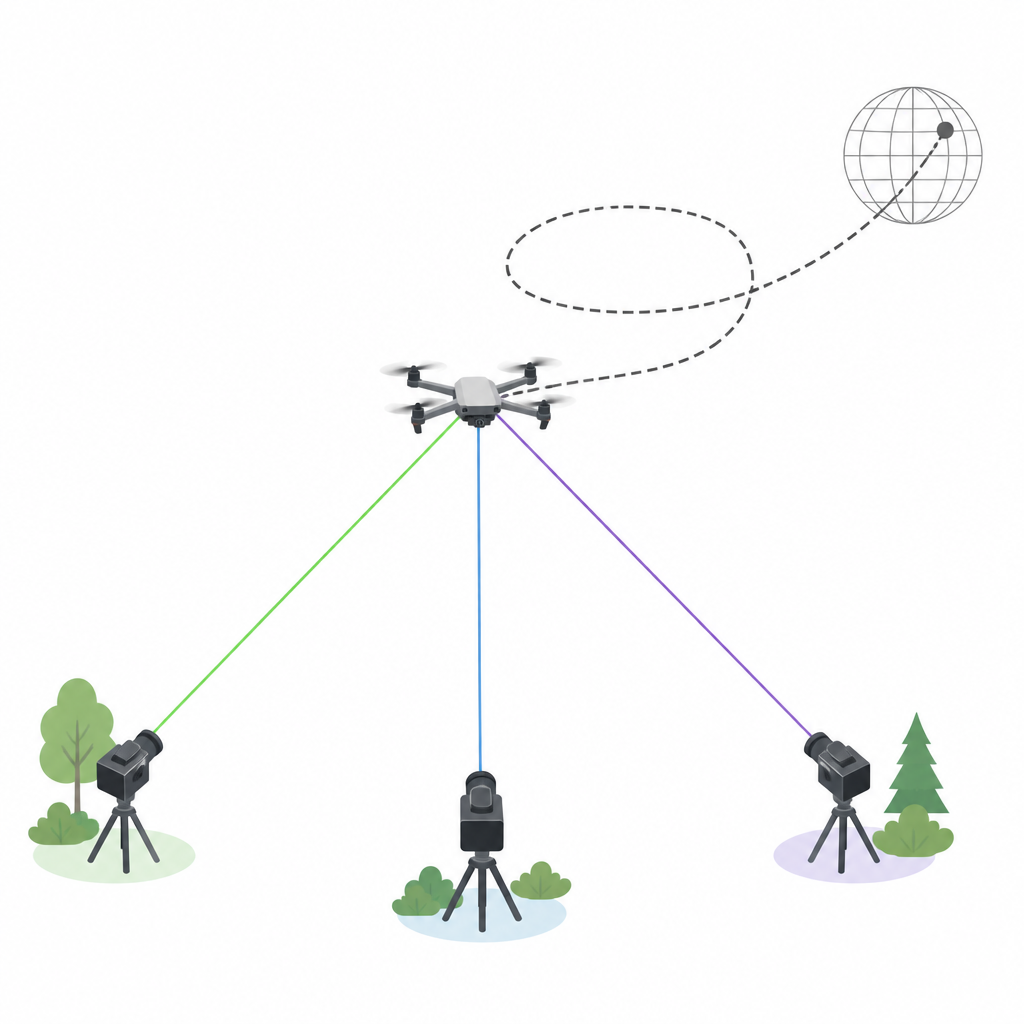
من الطائرات بدون طيار في مجال المدن إلى الحياة البرية في السماء النائية، تعتمد العديد من المهام الحديثة على معرفة مواضع الأجسام سريعة الحركة في ثلاثة أبعاد. اليوم يستلزم ذلك عادة مستقبلات أقمار صناعية مكلفة أو أجهزة معايرة بعناية. تقدم هذه الدراسة طريقة لتتبّع جسم طائر في ثلاثي الأبعاد باستخدام عدد قليل من الكاميرات العادية وخوارزميات ذكية، ما يفتح الباب أمام أنظمة مراقبة أرخص وأكثر مرونة.
رؤية الحركة بدلاً من قياس الأجهزة
تقسم أدوات تحديد المواقع الثلاثية الأبعاد التقليدية إلى معسكرين. الأنظمة النشطة، مثل الملاحة عبر الأقمار أو أجهزة الاستشعار المحمولة على الجسم، تتطلب أن يحمل الهدف معدات، وهو أمر غير ممكن للأهداف غير المعروفة أو غير التعاونية. الأنظمة السلبية، مثل الماسحات الليزرية أو الرادار، لا تلامس الهدف لكنها تعتمد على معدات باهظة الثمن أو علامات مرجعية لمعرفة اتجاه أجهزة الاستشعار. يسلك المؤلفون طريقًا مختلفًا. بدلاً من قياس ميلان وبَطَر كل كاميرا مقدمًا، لاحظوا أن مسار جسم متحرك، المسجّل كسلسلة من المواضع عبر الزمن، يمكن أن يعمل كمرجع طبيعي بحد ذاته. إذا راقبت عدة كاميرات نفس الجسم أثناء طيرانه، فإن الشكل المشترك لذلك المسار يربط مشاهدها معًا.
تحويل مشاهد الكاميرا ثنائية الأبعاد إلى مسار ثلاثي الأبعاد مشترك
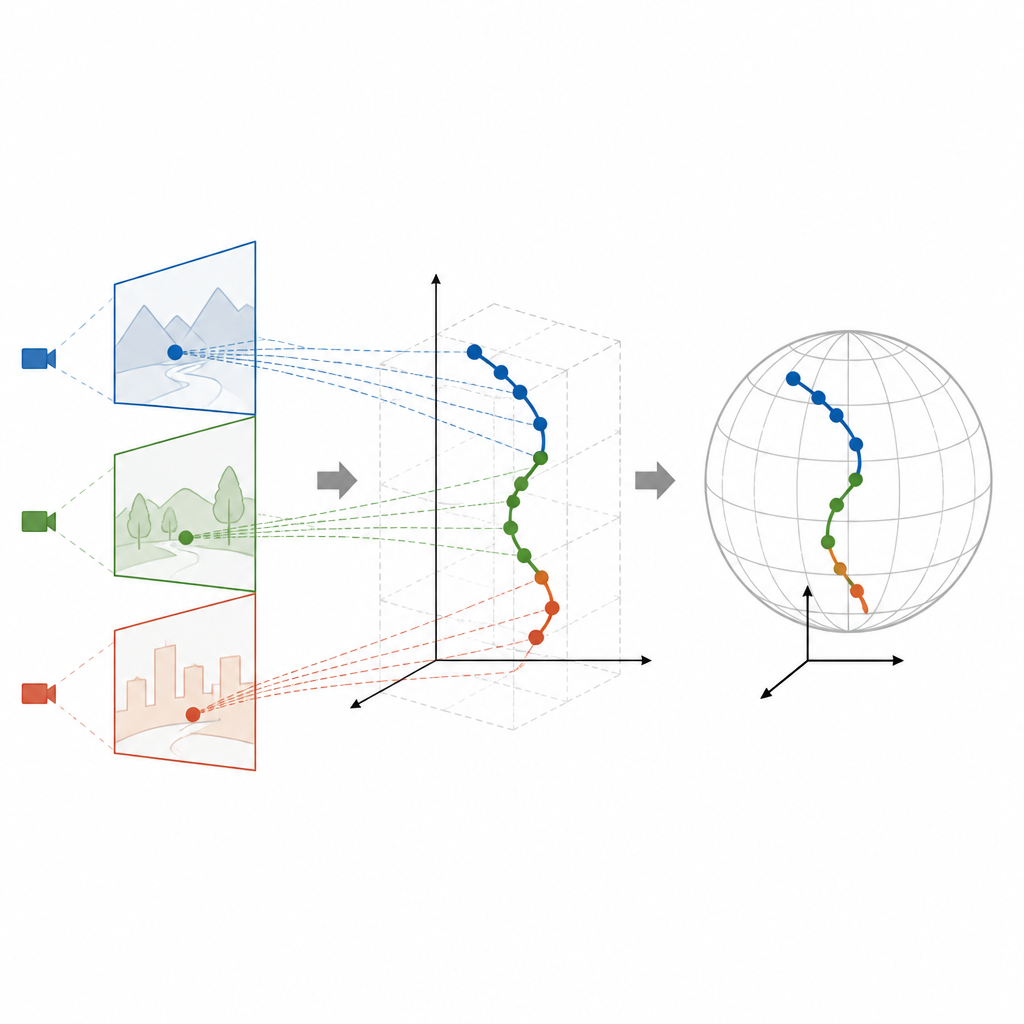
يبني الفريق إطار عمل من مرحلتين يدمج الذكاء الاصطناعي مع الهندسة الكلاسيكية. أولًا، يفحص كاشف ذكي مبني على أحدث عائلة You Only Look Once (YOLOv12) كل إطار فيديو ويعلّم مكان الطائرة بمستطيل بسيط تُستخرج منه إحداثيات البكسل. بدلًا من معالجة كل إطار بشكل منفصل، يمدّد المؤلفون النموذج إلى نسخة واعية بالزمن تسمى YOLO Time Series. من خلال النظر إلى كيفية تحرك الطائرة من إطار إلى آخر وباستخدام سرعتها النمطية، تملأ هذه النسخة الفجوات في الرصد وتصفّي المتطفلين مثل الطيور أو الحشرات. تصبح هذه المسارات الطويلة والمنقّاة من نقاط ثنائية الأبعاد من ثلاث كاميرات المادة الخام لإعادة بناء المسار الثلاثي الأبعاد.
السماح للرياضيات باستعادة أوضاع الكاميرا الخفية
في المرحلة الثانية، يطبّق المؤلفون أداة رياضية مدمجة تعرف بتحليل القيم المفردة (singular value decomposition) لربط المشاهد المختلفة للكاميرات. خلال فترة تجميع أولية، تُجمَع مئات الإطارات. تكشف المسارات الثنائية الأبعاد المشتركة من زوج كاميرات عن كيفية دوران هذه الكاميرات وانزياحها بالنسبة لبعضها البعض، رغم أن اتجاهاتها لم تُقاس قط. ومع هذا الترتيب النسبي، يستخدم النظام قواعد هندسية بسيطة لتثليث موقع الطائرة الثلاثي الأبعاد في كل لحظة في نظام إحداثيات إحدى الكاميرات المرجعية. بمعرفة مواقع الكاميرات على الأرض في إطار مرجعي عالمي فقط، يربط الأسلوب هذا المسار الثلاثي المحلي إلى خريطة بمقياس العالم، بحيث يمكن التعبير عن حركة الطائرة بمسافات وارتفاعات حقيقية.
الاختبار في فضاء افتراضي وعلى طائرة حقيقية
لفحص حدود الفكرة، يشغّل الباحثون أولًا محاكاة مفصّلة لطائرة تطير في مسار حلزوني فوق ثلاث كاميرات ثابتة. في هذه التجارب المثالية، يعيد إطارهم إحداثيات ثلاثية الأبعاد بخطأ لا يتجاوز بضعة ميليمترات، وتُظهر اختبارات إضافية كيف تؤثر الأخطاء في موضع الكاميرا أو اكتشاف البكسل في تدهور الدقة تدريجيًا. حتى عند إدخال مثل هذه العيوب، تظل الأخطاء متواضعة للتباعد والجودة الصوريّة النموذجية للكاميرات. ثم يجري الفريق اختبارًا ميدانيًا في ملعب رياضي، يتتبّعون طائرة حقيقية داخل حجم 100 في 100 في 30 مترًا باستخدام ثلاث هواتف ذكية متاحة تجاريًا. بمقارنة مسارهم المعاد بناؤه مع مستقبل الأقمار الصناعية onboard للطائرة، يوردون متوسط خطأ نحو خمسة أمتار وتطابقًا عاليًا بين أشكال المسارين، حتى تحت ظروف مطرية وإضاءة منخفضة.
ما يعنيه هذا لتتبّع ثلاثي الأبعاد اليومي
بعبارة بسيطة، تُظهر هذه العملة أنه يمكن تحويل حفنة من الكاميرات الرخيصة إلى موضع ثلاثي الأبعاد حي للأجسام المتحركة دون تثبيت أجهزة دقيقة على الكاميرات أو الهدف. من خلال السماح لحركة الجسم بربط المشاهد معًا، وبدمج الكشف المعتمد على التعلم مع صيغ رياضية مقتصدة، يوفّر الإطار مواقع ثلاثية الأبعاد سريعة ودقيقة إلى حد معقول باستخدام معدات محدودة. وعلى الرغم من أنه تم عرضه على طائرة واحدة، يمكن أن تمتد نفس المبادئ إلى أجسام طائرة أخرى أو حتى أهداف أرضية، ما يقدّم طرقًا جديدة لمراقبة الأرض المتغيرة بأدوات أبسط.
الاستشهاد: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
الكلمات المفتاحية: تتبّع ثلاثي الأبعاد, مراقبة الطائرات بدون طيار, رؤية حاسوبية, نظام متعدد الكاميرات, تحديد الموقع الجيوديسي