Clear Sky Science · sv
Att förena matematisk modellering och AI för 3D-koordinatigenkänning av rörliga objekt utan extern referens och attitydmätning
Varför det spelar roll att spåra rörliga objekt i 3D
Från drönare i stadsrum till vilda fåglar i avlägsna himlar — många moderna uppgifter kräver kunskap om var snabbrörliga objekt befinner sig i tre dimensioner. Idag kräver det ofta dyra satellitmottagare eller noggrant kalibrerade instrument. Denna studie presenterar ett sätt att spåra ett flygande objekt i 3D med endast ett fåtal vanliga kameror och smarta algoritmer, vilket öppnar för billigare och mer flexibla övervakningssystem.
Se rörelse istället för att mäta hårdvara
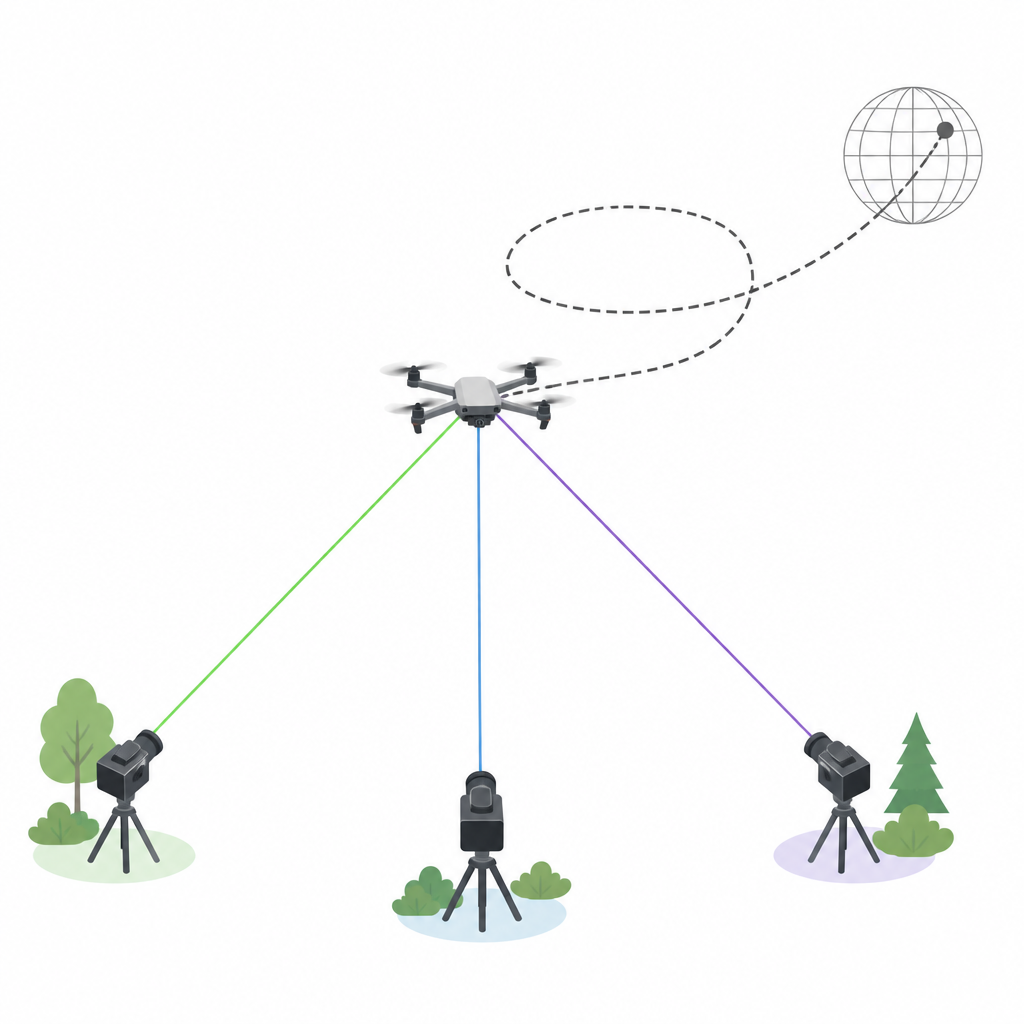
Traditionella verktyg för 3D-positionering hamnar i två läger. Aktiva system, som satellitnavigering eller ombordsensorer, kräver att det spårade objektet bär utrustning, vilket inte är möjligt för okända eller ovilliga mål. Passiva system, som laserskannrar eller radar, berör inte målet men förlitar sig på dyr utrustning eller referensmarkörer för att veta var sensorerna pekar. Författarna väljer en annan väg. Istället för att mäta varje kameras exakta lutning och rotation i förväg, noterar de att banan för ett rörligt objekt, inspelad som en sekvens positioner över tid, i sig kan fungera som en naturlig referens. Om flera kameror observerar samma objekt medan det flyger, knyter den gemensamma formen i banan ihop deras vyer.
Förvandla 2D-kameravyer till en gemensam 3D-bana
Teamet bygger ett tvåstegsramsverk som blandar artificiell intelligens med klassisk geometri. Först skannar en AI-detektor baserad på den senaste YOLOv12-familjen varje videoram och markerar drönaren med en enkel ruta, varifrån dess pixelkoordinater tas. Istället för att behandla varje ram separat utvidgar författarna modellen till en tidsmedveten version kallad YOLO Time Series. Genom att analysera hur drönaren rör sig från ram till ram och använda dess typiska hastighet fyller denna version i uteblivna observationer och filtrerar bort förväxlare som fåglar eller insekter. Dessa långa, rensade spår av 2D-punkter från tre kameror blir råmaterialet för att rekonstruera 3D-banan.
Låta matematiken återvinna dolda kamerapositioner
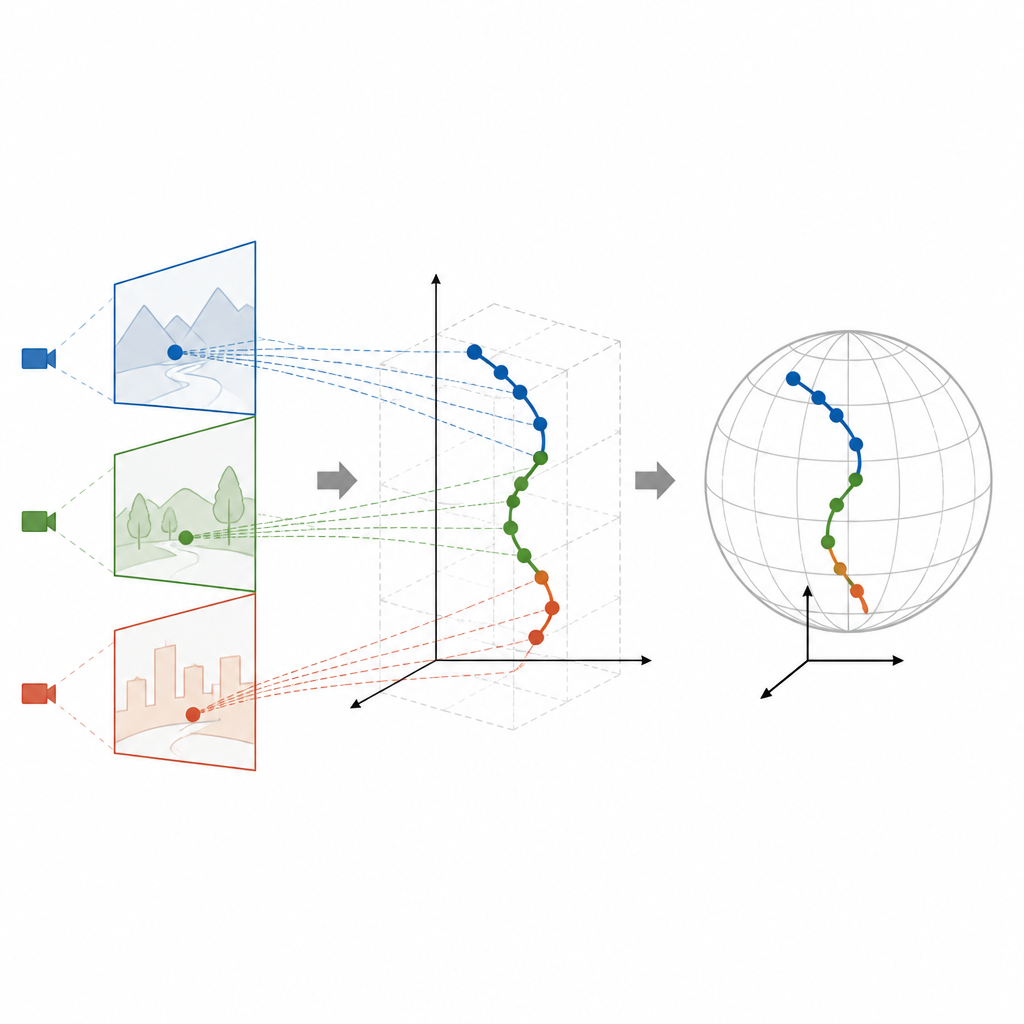
I det andra steget tillämpar författarna ett kompakt matematisk verktyg känt som singularvärdesuppdelning för att relatera de olika kamervyerna. Under en inledande blockperiod samlas hundratals ramar in. De delade 2D-spåren från ett par kameror avslöjar hur dessa kameror är roterade och förskjutna i förhållande till varandra, även om deras riktningar aldrig mättes. Med denna relativa layout i handen använder systemet enkla geometriska regler för att triangulera drönarens 3D-position i varje ögonblick i koordinatsystemet för en referenskamera. Genom att endast veta var kamerorna står på marken i ett globalt referensramverk länkar metoden sedan denna lokala 3D-bana till en världsskala, så att drönarens rörelse kan uttryckas i verkliga avstånd och höjder.
Testning i virtuellt rum och på en verklig drönare
För att pröva idéns gränser kör forskarna först detaljerade simuleringar av en drönare som flyger en spiralbana ovanför tre fasta kameror. I dessa idealiserade försök återvinner deras ramverk 3D-koordinaterna med fel på endast några millimeter, och ytterligare tester visar hur misstag i kameraplacering eller pixeldetektion gradvis försämrar noggrannheten. Även när sådana imperfektioner införs förblir felen måttliga för typiska kameraintervall och bildkvalitet. Teamet genomför sedan ett fälttest på en idrottsstadion, där de spårar en verklig drönare inom ett 100 × 100 × 30 meter stort volymfält med tre standard-smartphones. Genom att jämföra deras rekonstruerade bana med drönarens ombordmonterade satellitmottagare rapporterar de ett genomsnittligt fel på omkring fem meter och en hög överensstämmelse mellan formerna av de två banorna, även under regn och svagt ljus.
Vad detta innebär för vardaglig 3D-spårning
Enkelt uttryckt visar detta arbete att du kan förvandla ett fåtal prisvärda kameror till en realtids 3D-lokalisering för rörliga objekt utan att skruva fast precisionsinstrument på vare sig kamerorna eller målet. Genom att låta objektets rörelse binda ihop vyerna, och genom att kombinera lärandebaserad detektion med slanka matematiska formler, levererar ramverket snabba och relativt precisa 3D-positioner med begränsad hårdvara. Även om det demonstrerats på en enda drönare kan samma principer utsträckas till andra flygande objekt eller till och med markbaserade mål, vilket erbjuder nya sätt att observera en föränderlig jord med enklare verktyg.
Citering: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Nyckelord: 3D-spårning, drönarövervakning, datorseende, flerkamerasystem, geodetisk positionering