Clear Sky Science · es
Acoplando modelado matemático e IA para el reconocimiento de coordenadas 3D de objetos en movimiento sin referencia externa ni medición de actitud
Por qué importa seguir objetos en 3D
Desde drones en el espacio aéreo urbano hasta fauna en cielos remotos, muchas tareas modernas dependen de conocer la posición de objetos que se mueven rápidamente en las tres dimensiones. Hoy esto suele requerir receptores satelitales caros o instrumentos cuidadosamente calibrados. Este estudio presenta una forma de seguir un objeto volador en 3D usando solo unas pocas cámaras ordinarias y algoritmos inteligentes, abriendo la puerta a sistemas de monitorización más baratos y flexibles.
Ver el movimiento en lugar de medir el hardware
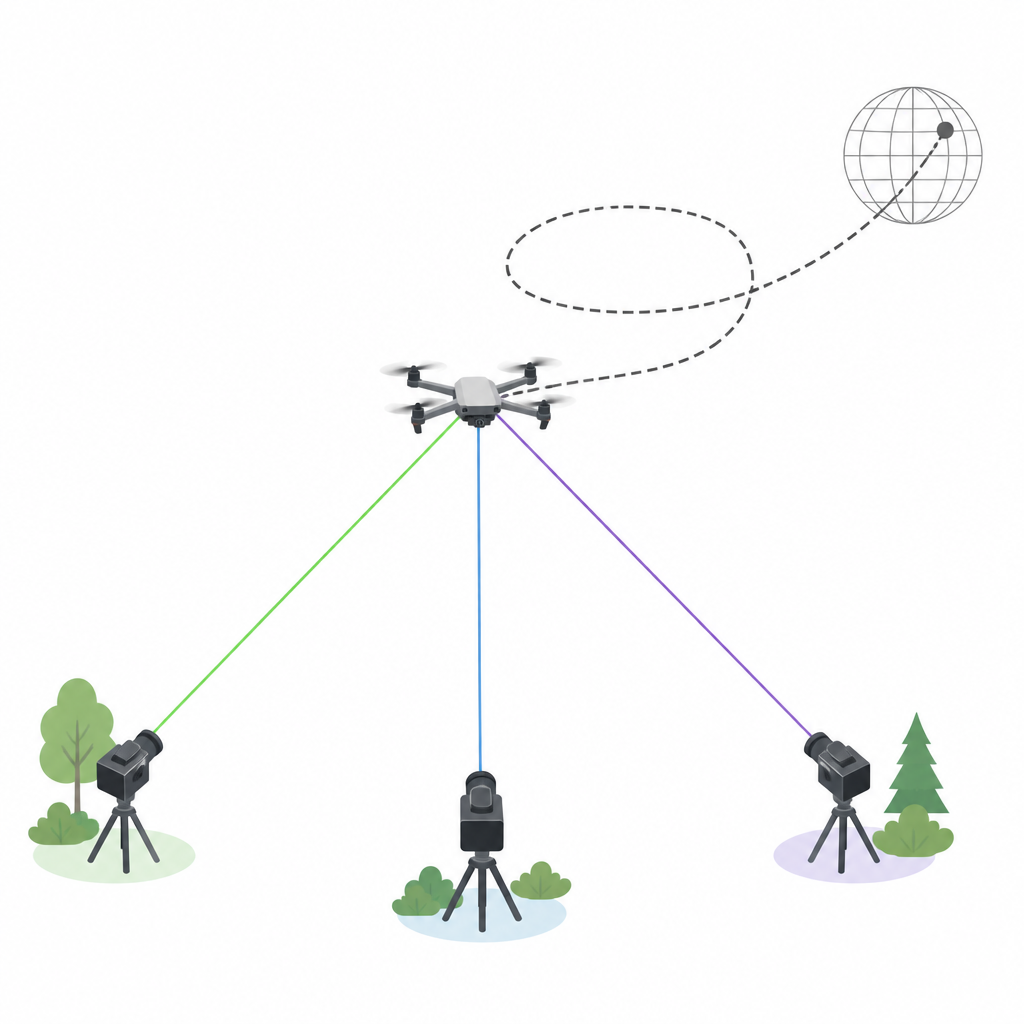
Las herramientas tradicionales de posicionamiento 3D caen en dos categorías. Los sistemas activos, como la navegación por satélite o sensores a bordo, requieren que el objeto lleve equipo, lo que no es posible para objetivos desconocidos o no cooperativos. Los sistemas pasivos, como escáneres láser o radar, no tocan el objetivo pero dependen de aparatos costosos o marcas de referencia para saber hacia dónde apuntan los sensores. Los autores adoptan una vía distinta. En lugar de medir con precisión la inclinación y rotación de cada cámara de antemano, observan que la trayectoria de un objeto en movimiento, registrada como una secuencia de posiciones en el tiempo, puede servir de referencia natural. Si varias cámaras observan el mismo objeto mientras vuela, la forma compartida de esa trayectoria conecta sus vistas.
Convertir vistas 2D de cámaras en una trayectoria 3D compartida
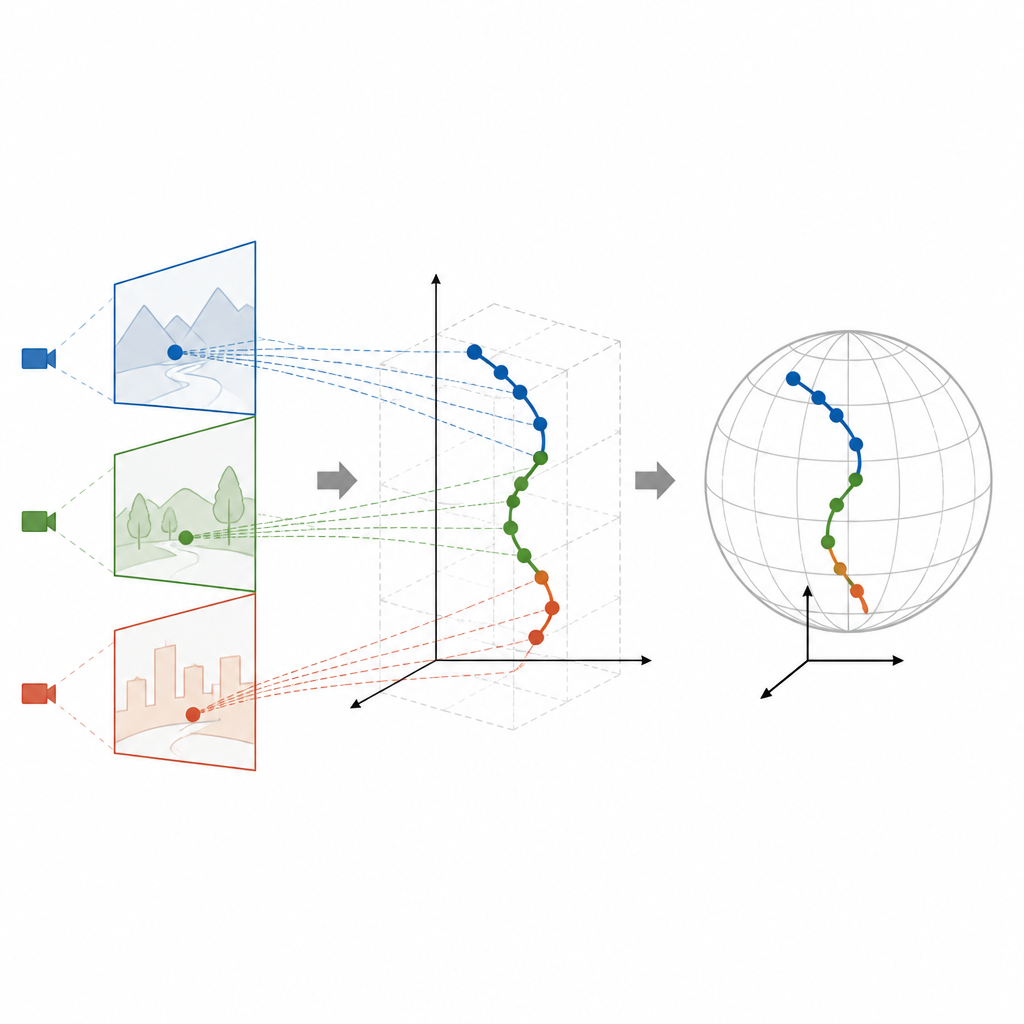
El equipo construye un marco de trabajo en dos etapas que mezcla inteligencia artificial con geometría clásica. Primero, un detector de IA basado en la familia You Only Look Once (YOLOv12) analiza cada fotograma de vídeo y marca el dron con una caja simple, de la que se extraen sus coordenadas en píxeles. En lugar de tratar cada fotograma por separado, los autores extienden el modelo a una versión temporal llamada YOLO Time Series. Al observar cómo se mueve el dron de un fotograma a otro y usando su velocidad típica, esta versión rellena avistamientos perdidos y filtra impostores como aves o insectos. Estos largos y depurados trayectos de puntos 2D procedentes de tres cámaras se convierten en la materia prima para reconstruir la trayectoria 3D.
Permitir que las matemáticas recuperen las poses ocultas de las cámaras
En la segunda etapa, los autores aplican una herramienta matemática compacta conocida como descomposición en valores singulares para relacionar las distintas vistas de las cámaras. Durante un periodo inicial por lotes se recopilan cientos de fotogramas. Los trayectos 2D compartidos entre un par de cámaras revelan cómo esas cámaras están rotadas y desplazadas entre sí, aun cuando nunca se midieron sus orientaciones. Con este diseño relativo en mano, el sistema emplea reglas geométricas sencillas para triangular la posición 3D del dron en cada instante en el sistema de coordenadas de una cámara de referencia. Conociendo únicamente la ubicación de las cámaras en el suelo dentro de un marco de referencia global, el método enlaza esta trayectoria 3D local con un mapa a escala real, de modo que el movimiento del dron puede expresarse en distancias y alturas reales.
Pruebas en espacio virtual y con un dron real
Para comprobar los límites de la idea, los investigadores ejecutan primero simulaciones detalladas de un dron volando en una trayectoria helicoidal sobre tres cámaras fijas. En estos ensayos idealizados, su marco recupera las coordenadas 3D con errores de solo unos pocos milímetros, y pruebas adicionales muestran cómo fallos en la colocación de las cámaras o en la detección de píxeles degradan gradualmente la precisión. Incluso cuando se introducen tales imperfecciones, los errores se mantienen modestos para separaciones de cámara y calidad de imagen típicas. El equipo realiza luego una prueba de campo en un estadio deportivo, rastreando un dron real dentro de un volumen de 100 por 100 por 30 metros usando tres smartphones comerciales. Al comparar la trayectoria reconstruida con el receptor satelital a bordo del dron, informan un error medio de alrededor de cinco metros y una alta concordancia entre las formas de ambas trayectorias, incluso bajo lluvia y condiciones de baja luminosidad.
Qué significa esto para el seguimiento 3D cotidiano
En términos sencillos, este trabajo muestra que se puede convertir un puñado de cámaras económicas en un localizador 3D en tiempo real para objetos en movimiento sin montar instrumentos de precisión ni en las cámaras ni en el objetivo. Al dejar que el movimiento del objeto vincule las vistas y al combinar detección basada en aprendizaje con fórmulas matemáticas ligeras, el marco ofrece posiciones 3D rápidas y razonablemente precisas usando hardware limitado. Aunque se demuestra con un solo dron, los mismos principios podrían extenderse a otros objetos voladores o incluso a objetivos terrestres, ofreciendo nuevas maneras de observar la Tierra cambiante con herramientas más simples.
Cita: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Palabras clave: seguimiento 3D, monitorización de drones, visión por ordenador, sistema multicámara, posicionamiento geodésico