Clear Sky Science · de
Mathematische Modellierung und KI verbinden für 3D-Koordinatenerkennung bewegter Objekte ohne externe Referenz und Lagebestimmung
Warum die Verfolgung bewegter Objekte in 3D wichtig ist
Von Drohnen im urbanen Luftraum bis zur Tierbeobachtung in abgelegenen Regionen: Viele moderne Anwendungen benötigen die Kenntnis, wo sich schnell bewegte Objekte im dreidimensionalen Raum befinden. Bislang setzt man dafür meist teure Satellitenempfänger oder sorgfältig kalibrierte Messinstrumente ein. Diese Studie stellt eine Methode vor, ein fliegendes Objekt in 3D allein mit wenigen gewöhnlichen Kameras und intelligenten Algorithmen nachzuverfolgen und eröffnet damit kostengünstigere und flexiblere Überwachungslösungen.
Bewegung sehen statt Hardware messen
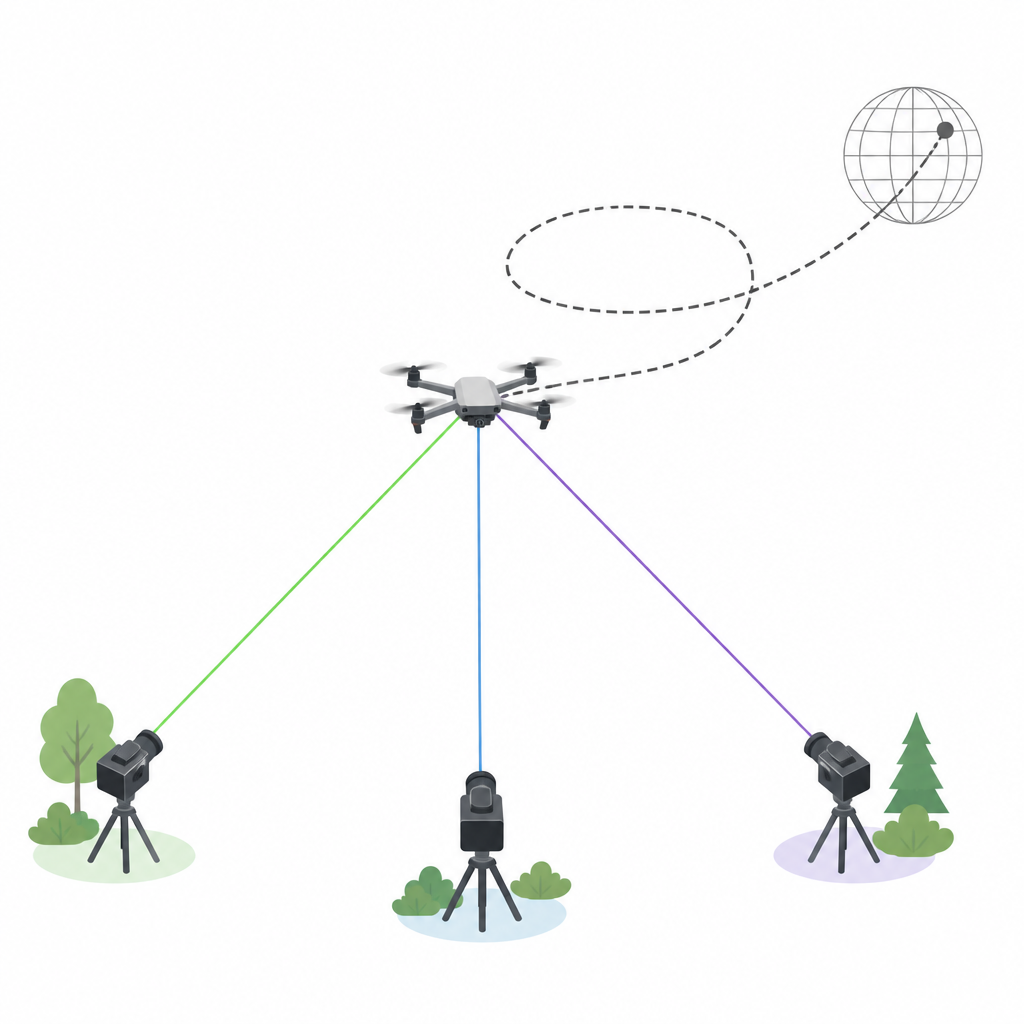
Traditionelle 3D-Positionsbestimmungen lassen sich in zwei Gruppen einteilen. Aktive Systeme, wie Satellitennavigation oder Bord-Sensorik, erfordern, dass das verfolgte Objekt Ausrüstung trägt — das ist bei unbekannten oder nicht-kooperativen Zielen nicht möglich. Passive Systeme, etwa Laserscanner oder Radar, berühren das Ziel nicht, sind aber auf teure Geräte oder Referenzmarken angewiesen, um die Blickrichtung der Sensoren zu kennen. Die Autoren wählen einen anderen Ansatz. Anstatt die exakte Neigung und Drehung jeder Kamera im Voraus zu messen, nutzen sie die Beobachtung, dass der Pfad eines bewegten Objekts, aufgezeichnet als Folge von Positionen über die Zeit, selbst als natürliche Referenz dienen kann. Sehen mehrere Kameras dasselbe Objekt beim Flug, verbindet die gemeinsame Form dieses Pfads deren Ansichten miteinander.
2D-Kamerabilder in einen gemeinsamen 3D-Pfad verwandeln
Das Team entwickelt ein zweistufiges Konzept, das künstliche Intelligenz mit klassischer Geometrie verbindet. Zuerst scannt ein KI-Detektor aus der YOLOv12-Familie jedes Videoframe und markiert die Drohne mit einem einfachen Rahmen, aus dem ihre Pixelkoordinaten entnommen werden. Statt jedes Bild isoliert zu behandeln, erweitern die Autoren das Modell zu einer zeitbewussten Version namens YOLO Time Series. Indem diese Version betrachtet, wie sich die Drohne von Frame zu Frame bewegt und ihre typische Geschwindigkeit nutzt, füllt sie übersehene Sichtungen nach und filtert Störer wie Vögel oder Insekten heraus. Diese langen, bereinigten 2D-Spuren aus drei Kameras werden zur Rohbasis für die Rekonstruktion des 3D-Pfads.
Mathematik die verborgene Kameraposen wiederherstellen lässt
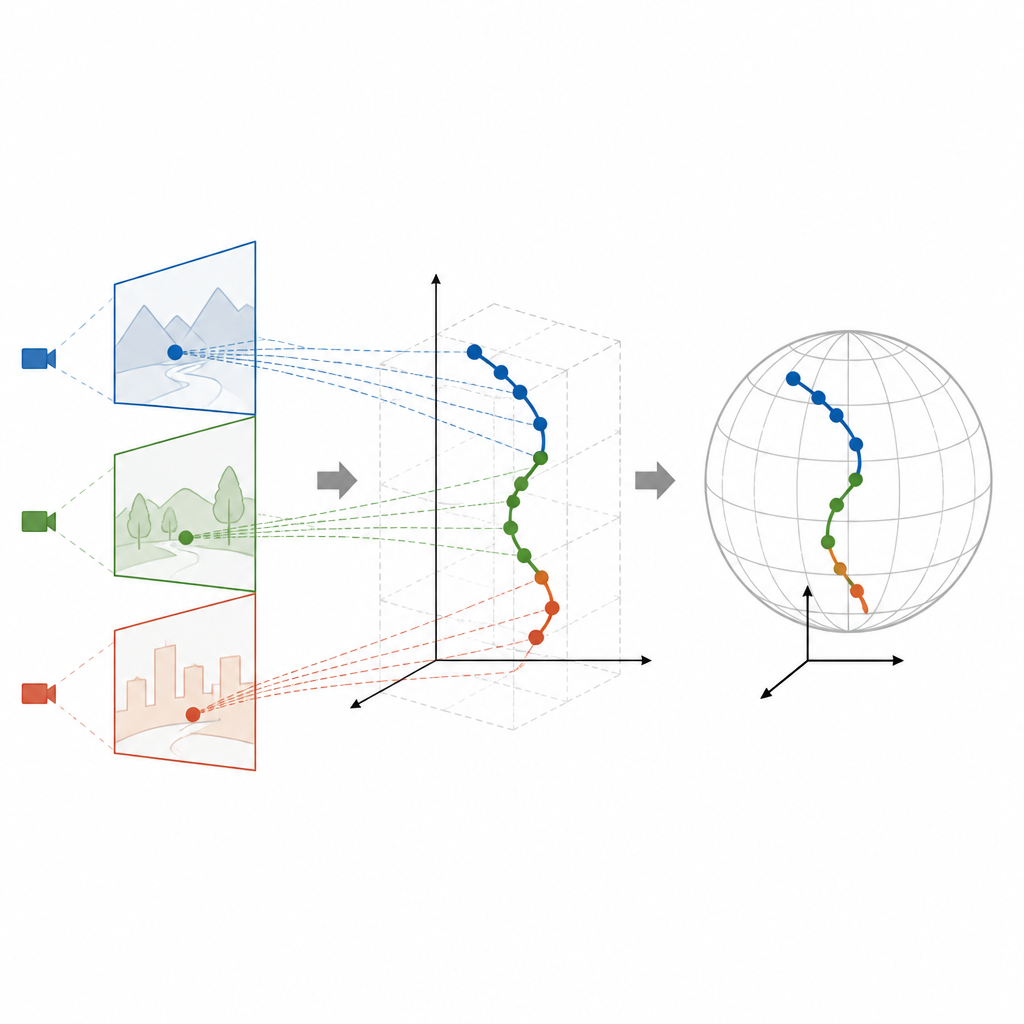
In der zweiten Stufe wenden die Autoren ein kompaktes mathematisches Werkzeug an, die singuläre Wertzerlegung, um die verschiedenen Kamerasichten zueinander in Beziehung zu setzen. Während einer anfänglichen Sammelperiode werden Hunderte von Frames aufgenommen. Die gemeinsamen 2D-Spuren eines Kamerapaares zeigen, wie diese Kameras zueinander gedreht und verschoben sind, obwohl ihre Ausrichtungen nie gemessen wurden. Mit diesem relativen Aufbau nutzt das System einfache geometrische Regeln, um die 3D-Position der Drohne zu jedem Zeitpunkt im Koordinatensystem einer Referenzkamera zu triangulieren. Kennt man zudem die Positionen der Kameras am Boden in einem globalen Referenzsystem, lässt sich der lokale 3D-Pfad mit einer Weltkarte in Realmaßstab verbinden, sodass die Bewegung der Drohne in tatsächlichen Distanzen und Höhen ausgedrückt werden kann.
Tests im virtuellen Raum und mit einer echten Drohne
Um die Grenzen der Idee zu prüfen, führen die Forscher zunächst detaillierte Simulationen einer Drohne durch, die eine Spiralbahn über drei fixierten Kameras fliegt. In diesen idealisierten Versuchen rekonstruiert ihr System die 3D-Koordinaten mit Abweichungen von nur wenigen Millimetern; weitere Tests zeigen, wie Fehler in Kamerapositionierung oder Pixelerkennung die Genauigkeit schrittweise verschlechtern. Selbst wenn solche Unvollkommenheiten eingeführt werden, bleiben die Fehler bei typischem Kamerastandabstand und Bildqualität moderat. Anschließend führen sie einen Feldversuch in einem Sportstadion durch und verfolgen eine echte Drohne in einem Volumen von 100 × 100 × 30 Metern mit drei handelsüblichen Smartphones. Im Vergleich mit dem satellitengestützten Bordempfänger der Drohne berichten sie von einem mittleren Fehler von etwa fünf Metern und einer hohen Übereinstimmung der Pfadformen, selbst bei Regen und schlechter Beleuchtung.
Was das für alltägliche 3D-Verfolgung bedeutet
Einfach ausgedrückt zeigt diese Arbeit, dass sich mit einer Handvoll preiswerter Kameras ein Echtzeit-3D-Lokalisierer für bewegte Objekte realisieren lässt, ohne Präzisionsinstrumente an den Kameras oder am Ziel anzubringen. Indem die Bewegung des Objekts die Ansichten verbindet und lernbasierte Detektion mit schlanken mathematischen Formeln kombiniert wird, liefert das Framework schnell und halbwegs genau 3D-Positionen bei begrenzter Hardware. Zwar demonstriert die Studie die Methode an einer einzelnen Drohne, die gleichen Prinzipien ließen sich jedoch auf andere Flugobjekte oder sogar bodengestützte Ziele ausweiten und bieten neue Wege, die veränderliche Erde mit einfacheren Mitteln zu beobachten.
Zitation: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Schlüsselwörter: 3D-Verfolgung, Drohnenüberwachung, Computer Vision, Mehrkamerasystem, geodätische Positionierung