Clear Sky Science · pt
Conectando modelagem matemática e IA para reconhecimento de coordenadas 3D de objetos em movimento sem referência externa e medição de atitude
Por que rastrear objetos em movimento em 3D é importante
De drones no espaço aéreo urbano a animais em céus remotos, muitas tarefas modernas dependem de saber onde objetos rápidos estão em três dimensões. Hoje isso normalmente exige receptores por satélite caros ou instrumentos cuidadosamente calibrados. Este estudo apresenta uma forma de rastrear um objeto voador em 3D usando apenas algumas câmeras comuns e algoritmos inteligentes, abrindo caminho para sistemas de monitoramento mais baratos e flexíveis.
Ver o movimento em vez de medir o equipamento
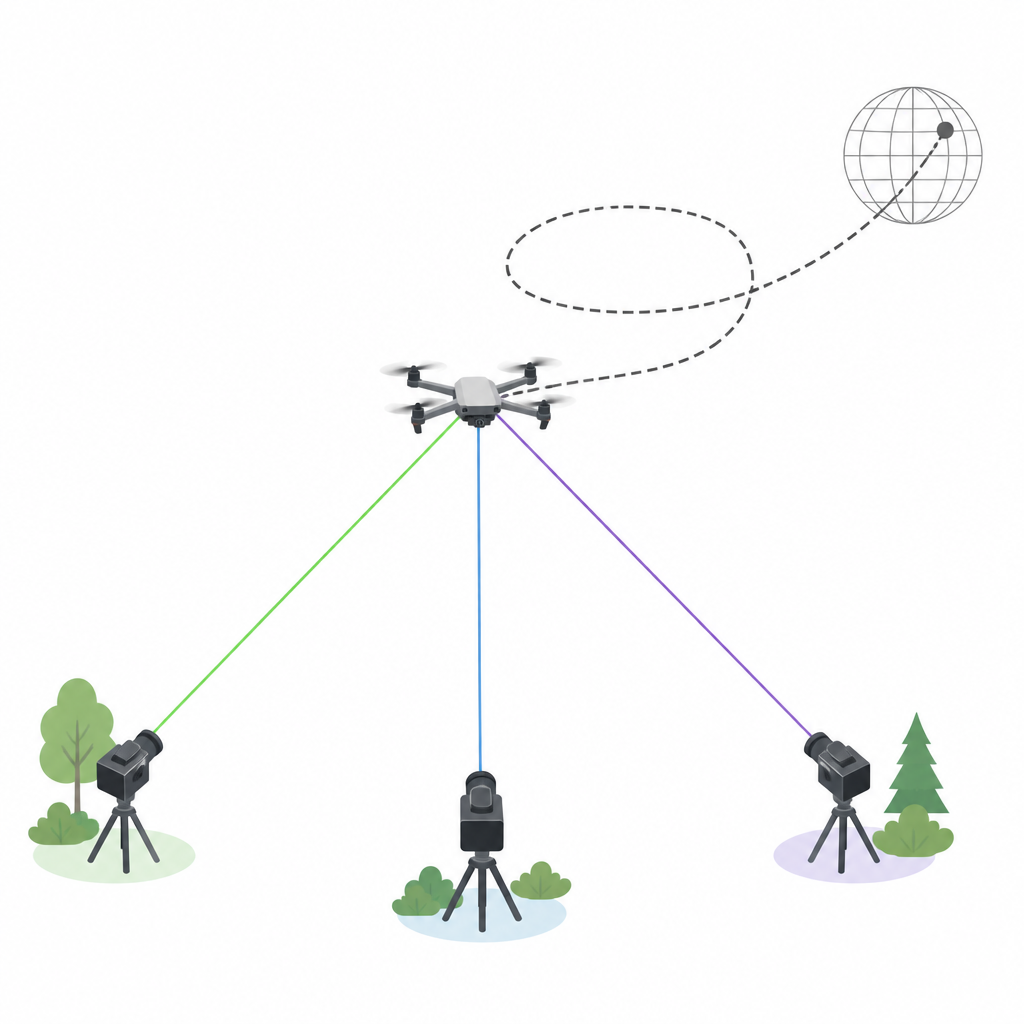
As ferramentas tradicionais de posicionamento 3D se dividem em duas categorias. Sistemas ativos, como navegação por satélite ou sensores embarcados, exigem que o objeto carregue equipamento, o que não é possível para alvos desconhecidos ou não cooperativos. Sistemas passivos, como scanners a laser ou radar, não tocam o alvo, mas dependem de equipamentos caros ou marcadores de referência para saber para onde os sensores estão apontando. Os autores seguem um caminho diferente. Em vez de medir a inclinação e a rotação exatas de cada câmera antecipadamente, eles percebem que a trajetória de um objeto em movimento, registrada como uma sequência de posições ao longo do tempo, pode servir como uma referência natural. Se várias câmeras observam o mesmo objeto enquanto ele voa, a forma compartilhada dessa trajetória conecta as suas vistas.
Transformando vistas 2D de câmeras em uma trajetória 3D comum
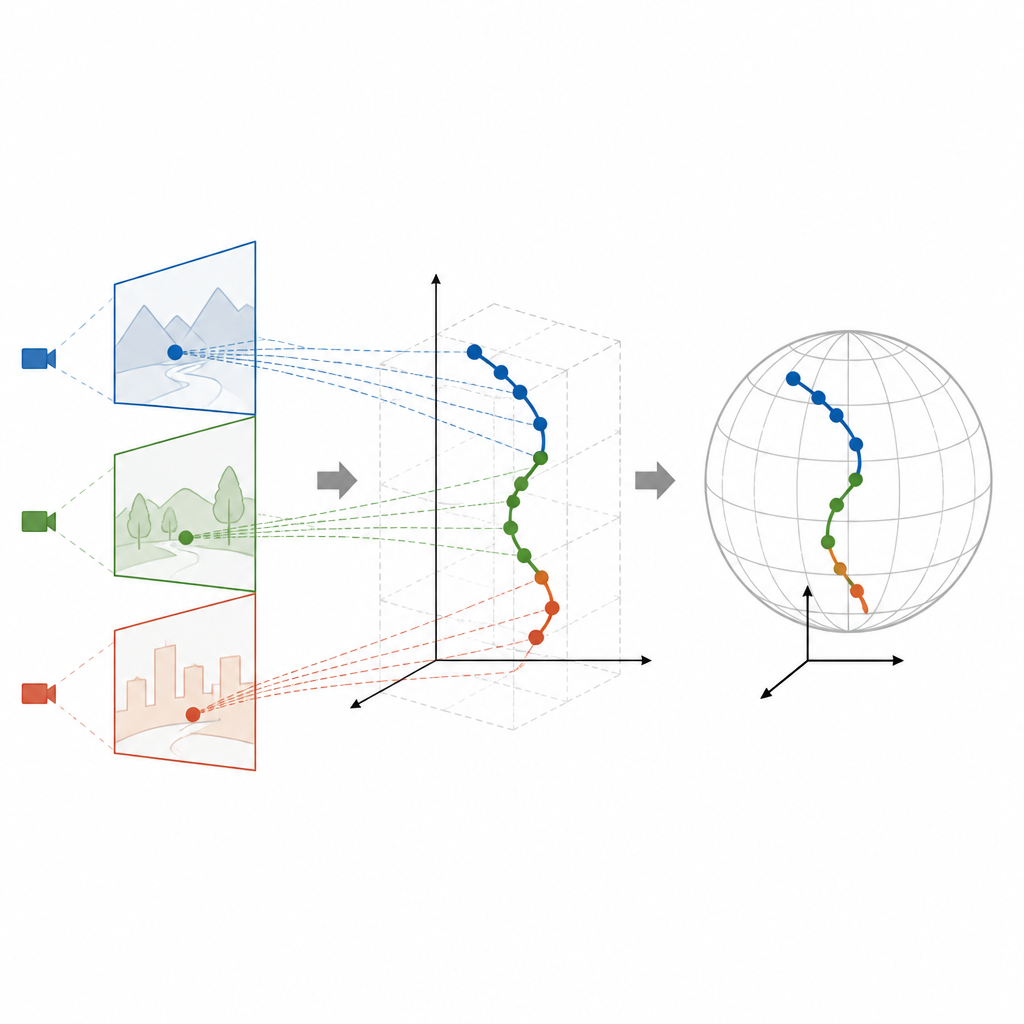
A equipe constrói uma estrutura em duas etapas que mistura inteligência artificial com geometria clássica. Primeiro, um detector de IA baseado na família You Only Look Once (YOLOv12) mais recente varre cada quadro de vídeo e marca o drone com uma caixa simples, de onde são extraídas suas coordenadas em pixels. Em vez de tratar cada quadro separadamente, os autores estendem o modelo para uma versão sensível ao tempo chamada YOLO Time Series. Ao observar como o drone se move de quadro a quadro e usando sua velocidade típica, essa versão preenche avistamentos perdidos e filtra impostores como pássaros ou insetos. Essas trilhas longas e limpas de pontos 2D provenientes de três câmeras tornam-se a matéria-prima para reconstruir a trajetória 3D.
Deixar a matemática recuperar poses de câmera ocultas
Na segunda etapa, os autores aplicam uma ferramenta matemática compacta conhecida como decomposição em valores singulares para relacionar as diferentes vistas das câmeras. Durante um período inicial de coleta, centenas de quadros são reunidos. As trilhas 2D compartilhadas de um par de câmeras revelam como essas câmeras estão giradas e deslocadas entre si, mesmo que suas direções nunca tenham sido medidas. Com esse layout relativo em mãos, o sistema usa regras geométricas simples para triangular a posição 3D do drone em cada instante no sistema de coordenadas de uma câmera de referência. Sabendo apenas onde as câmeras estão no solo em um referencial global, o método então conecta essa trajetória 3D local a um mapa em escala mundial, para que o movimento do drone seja expresso em distâncias e alturas reais.
Testes em espaço virtual e com um drone real
Para verificar os limites da ideia, os pesquisadores primeiro executam simulações detalhadas de um drone voando em uma trajetória em espiral acima de três câmeras fixas. Nesses testes idealizados, a estrutura deles recupera as coordenadas 3D com erros de apenas alguns milímetros, e testes adicionais mostram como erros na posição das câmeras ou na detecção de pixels degradam gradualmente a precisão. Mesmo quando tais imperfeições são introduzidas, os erros permanecem modestos para espaçamentos de câmera e qualidade de imagem típicos. A equipe então realiza um teste de campo em um estádio esportivo, rastreando um drone real dentro de um volume de 100 por 100 por 30 metros usando três smartphones comuns. Comparando a trajetória reconstruída com o receptor por satélite embarcado no drone, eles relatam um erro médio de cerca de cinco metros e uma alta correspondência entre as formas das duas trajetórias, mesmo sob chuva e baixa luminosidade.
O que isso significa para o rastreamento 3D cotidiano
Em termos simples, este trabalho mostra que é possível transformar um punhado de câmeras baratas em um localizador 3D em tempo real para objetos em movimento sem prender instrumentos de precisão nas câmeras ou no alvo. Ao permitir que o movimento do objeto una as vistas e ao combinar detecção baseada em aprendizado com fórmulas matemáticas enxutas, a estrutura fornece posições 3D rápidas e razoavelmente precisas usando hardware limitado. Embora demonstrado em um único drone, os mesmos princípios podem se estender a outros objetos voadores ou mesmo alvos no solo, oferecendo novas maneiras de observar a Terra em mudança com ferramentas mais simples.
Citação: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Palavras-chave: rastreamento 3D, monitoramento de drones, visão computacional, sistema multicâmera, posicionamento geodésico