Clear Sky Science · it
Colmare il divario tra modellizzazione matematica e IA per il riconoscimento delle coordinate 3D di oggetti in movimento senza riferimento esterno e misurazione dell’assetto
Perché tracciare oggetti in movimento in 3D è importante
Dai droni nello spazio aereo urbano alla fauna selvatica nei cieli remoti, molte attività moderne dipendono dal conoscere la posizione di oggetti in rapido movimento in tre dimensioni. Oggi questo richiede di solito ricevitori satellitari costosi o strumenti calibrati con cura. Questo studio introduce un metodo per tracciare un oggetto volante in 3D usando solo poche telecamere comuni e algoritmi intelligenti, aprendo la strada a sistemi di monitoraggio più economici e flessibili.
Osservare il moto invece di misurare l’hardware
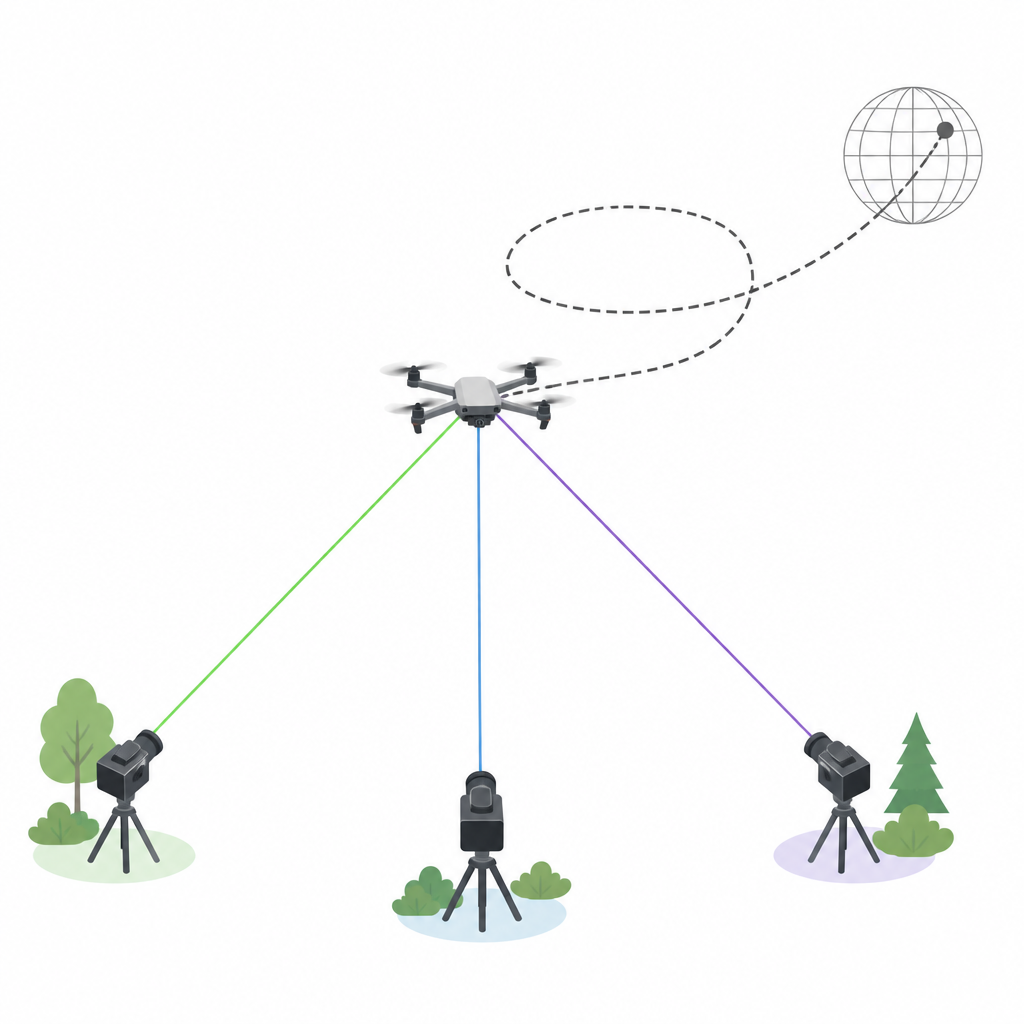
Gli strumenti tradizionali di posizionamento 3D ricadono in due categorie. I sistemi attivi, come la navigazione satellitare o i sensori a bordo, richiedono che l’oggetto monitorato porti apparecchiature, cosa impossibile per bersagli sconosciuti o non cooperativi. I sistemi passivi, come scanner laser o radar, non toccano il bersaglio ma si affidano ad apparecchiature costose o a riferimenti marcatori per sapere dove sono puntati i sensori. Gli autori seguono un percorso diverso. Piuttosto che misurare l’inclinazione e la rotazione esatte di ogni telecamera a priori, osservano che la traiettoria di un oggetto in movimento, registrata come una sequenza di posizioni nel tempo, può servire essa stessa da riferimento naturale. Se diverse telecamere osservano lo stesso oggetto mentre vola, la forma condivisa di quella traiettoria mette in relazione le loro viste.
Trasformare viste 2D da telecamera in un percorso 3D condiviso
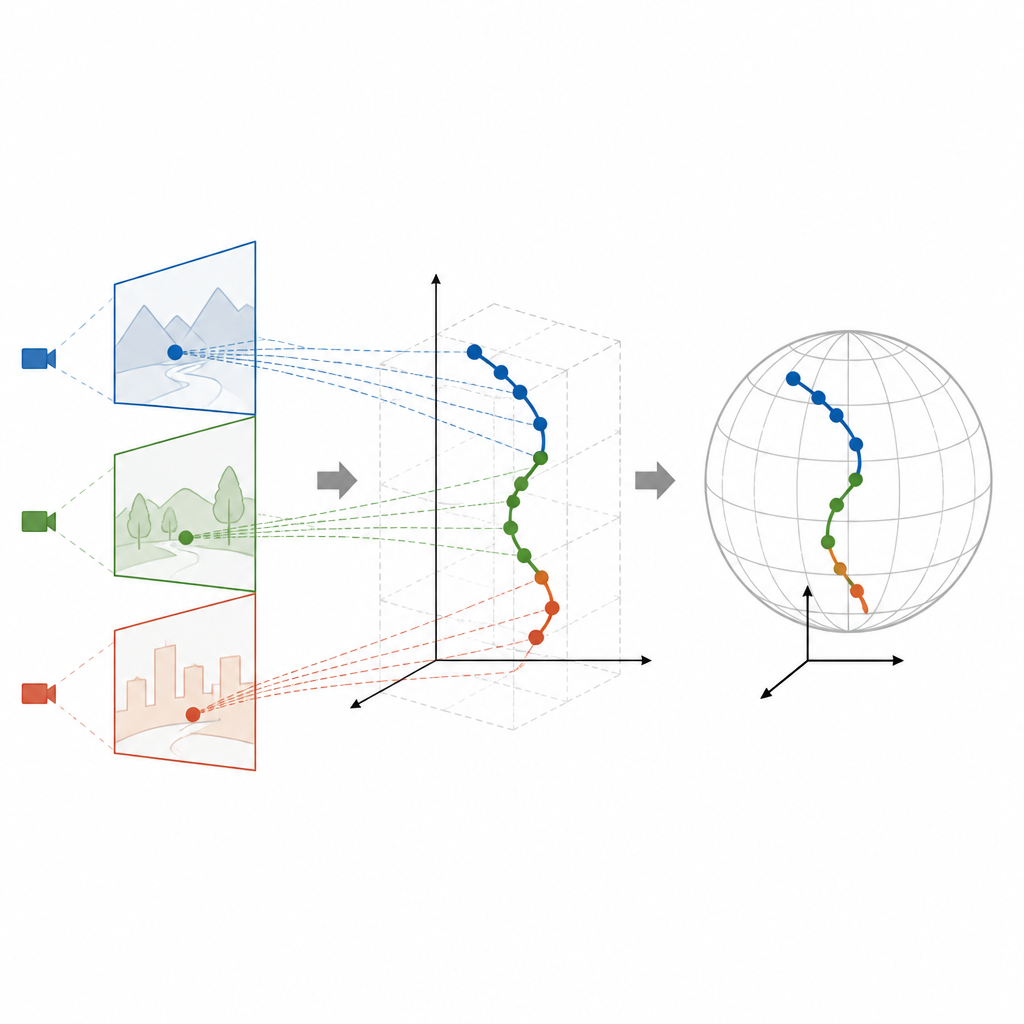
Il team costruisce un framework in due fasi che fonde intelligenza artificiale con geometria classica. Per prima cosa, un rivelatore AI basato sulla famiglia più recente di You Only Look Once (YOLOv12) analizza ogni fotogramma video e individua il drone con una semplice casella, da cui si estraggono le coordinate in pixel. Anziché trattare ogni fotogramma separatamente, gli autori estendono il modello in una versione sensibile al tempo chiamata YOLO Time Series. Guardando come il drone si muove da fotogramma a fotogramma e sfruttando la sua velocità tipica, questa versione colma gli avvistamenti mancati e filtra gli impostori come uccelli o insetti. Questi lunghi e ripuliti tracciati 2D di punti provenienti da tre telecamere diventano il materiale grezzo per la ricostruzione del percorso 3D.
Lasciare che la matematica recuperi le pose nascoste delle telecamere
Nella seconda fase, gli autori applicano uno strumento matematico compatto noto come decomposizione ai valori singolari per mettere in relazione le diverse viste delle telecamere. Durante un periodo iniziale di raccolta in batch, si acquisiscono centinaia di fotogrammi. I tracciati 2D condivisi di una coppia di telecamere rivelano come quelle telecamere sono ruotate e traslate l’una rispetto all’altra, anche se le loro direzioni non sono mai state misurate. Con questa configurazione relativa a disposizione, il sistema usa regole geometriche semplici per triangolare la posizione 3D del drone in ogni istante nel sistema di coordinate di una telecamera di riferimento. Sapendo soltanto dove le telecamere sono posizionate a terra in un riferimento globale, il metodo collega quindi questo percorso 3D locale a una mappa su scala mondiale, così il moto del drone può essere espresso in distanze e altezze reali.
Test in spazio virtuale e su un drone reale
Per verificare i limiti dell’idea, i ricercatori eseguono prima simulazioni dettagliate di un drone che descrive una traiettoria a spirale sopra tre telecamere fisse. In questi test idealizzati, il loro framework recupera le coordinate 3D con errori di pochi millimetri, e ulteriori prove mostrano come errori nella collocazione delle telecamere o nella rilevazione dei pixel degradino gradualmente l’accuratezza. Anche quando si introducono tali imperfezioni, gli errori rimangono modesti per spaziature e qualità d’immagine tipiche delle telecamere. Il team esegue poi un test sul campo in uno stadio sportivo, tracciando un drone reale all’interno di un volume di 100 per 100 per 30 metri usando tre smartphone commerciali. Confrontando il percorso ricostruito con il ricevitore satellitare a bordo del drone, riportano un errore medio di circa cinque metri e un’elevata corrispondenza tra le forme dei due percorsi, anche in condizioni di pioggia e scarsa illuminazione.
Cosa significa per il tracciamento 3D di tutti i giorni
In termini semplici, questo lavoro dimostra che è possibile trasformare un pugno di telecamere economiche in un localizzatore 3D in tempo reale per oggetti in movimento senza fissare strumenti di precisione né sulle telecamere né sul bersaglio. Lasciando che il moto dell’oggetto leghi insieme le viste e combinando il rilevamento basato sull’apprendimento con formule matematiche snelle, il framework fornisce posizioni 3D rapide e ragionevolmente accurate con hardware limitato. Pur essendo dimostrato su un singolo drone, gli stessi principi potrebbero estendersi ad altri oggetti volanti o persino a bersagli a terra, offrendo nuovi modi per osservare la Terra che cambia con strumenti più semplici.
Citazione: Yi, J., Shang, Kk. & Small, M. Bridging mathematical modeling and AI for 3D coordinate recognition of moving objects without external reference and attitude measurement. Commun Eng 5, 89 (2026). https://doi.org/10.1038/s44172-026-00648-x
Parole chiave: tracciamento 3D, monitoraggio droni, visione artificiale, sistema multitelecamera, posizionamento geodetico