Clear Sky Science · tr
YOLO-MFD: prefabrik kıyı hattı su altı nesne tespiti için çok ölçekli özellik ve dinamik kafa çerçevesi
Şehir Kıyıları Altında Daha Akıllı Gözler
Şehirler nehir ve göller boyunca daha fazla duvar, iskele ve prefabrik temeller inşa ettikçe, kritik altyapının büyük kısmı su altında gizleniyor. Bu blokların sağlam, çatlaklı veya döküntü ile dolu olup olmadığını kontrol etmek zor; özellikle görüşün kötü olduğu bulanık, sığ sularda. Bu makale, suyun bulanık ve sahne kalabalık olsa bile sualtı robotlarının kıyı boyunca küçük, sönük nesneleri daha güvenilir ve hızlı biçimde tespit etmesine yardımcı olan yeni bir bilgisayarlı görü sistemi olan YOLO-MFD'yi tanıtıyor.
Su Altı Görüntüleri Neden Bu Kadar Okunması Zor?
Nehirler, göller ve kentsel kıyı suları nadiren kristal berraklığındadır. Işık emilir ve saçılır, renkler yeşil veya maviye kayar ve asılı parçacıklar kenarları bulanıklaştırır. Küçük canlılar, deniz çöpleri veya prefabrik kıyı bloklarındaki kusurlar küçük, düşük kontrastlı ve sıkışık olabilir. Açık sokak sahneleri için tasarlanmış standart nesne tespit sistemleri bu hedefleri kaçırma ya da arka plan karmaşasıyla karıştırma eğilimindedir. Aynı zamanda, kıyı yakınında kullanılan inceleme robotları ve gömülü cihazların hesaplama gücü sınırlıdır; bu nedenle herhangi bir çözüm hem hassas hem de verimli olmalıdır.
Bulanık Su İçin Üç Bölümlü Bir Beyin
YOLO-MFD, gerçek zamanlı dedektörlerin popüler YOLO ailesine dayanır ancak iç “beynini” üç uyumlu aşamada yeniden şekillendirir. İlk olarak, CUMANet (Çapraz Ölçek Birleşik Çok-ölçekli Dikkat Ağı) adlı yeni bir omurga, geniş bağlama dikkat ederken görüntülerden özellik çıkarmayı öğrenir. Paralel dallar ve eğitim sırasında çok dallı bir modül gibi davranan, dağıtımda ise tek, verimli bir işleve sadeleşen özel bir evrişim kullanır. Bu, ağın yerel gürültünün ötesine bakmasına, uzun menzilli ipuçlarını yakalamasına ve bulanıklık ile renk bozulması nedeniyle önemli ayrıntıların yıkanmasını önlemeye yardımcı olur.
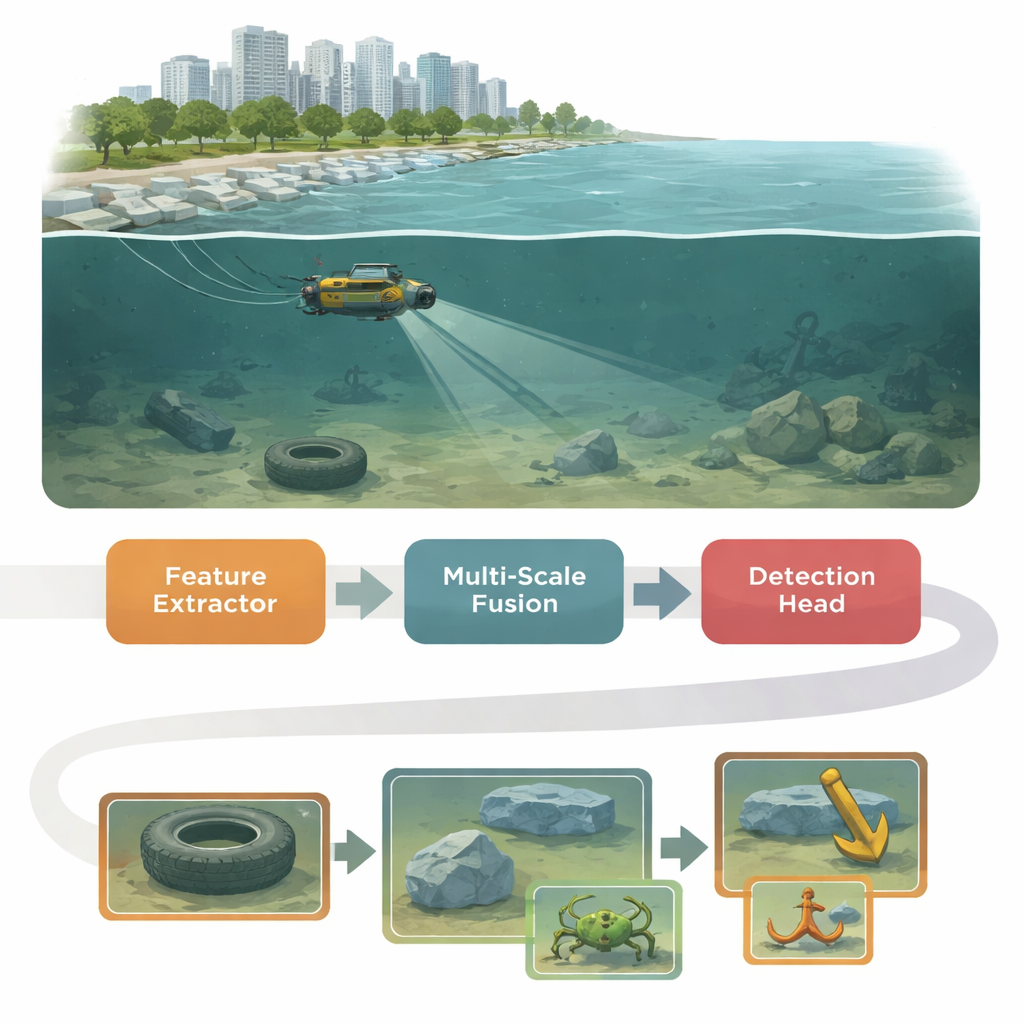
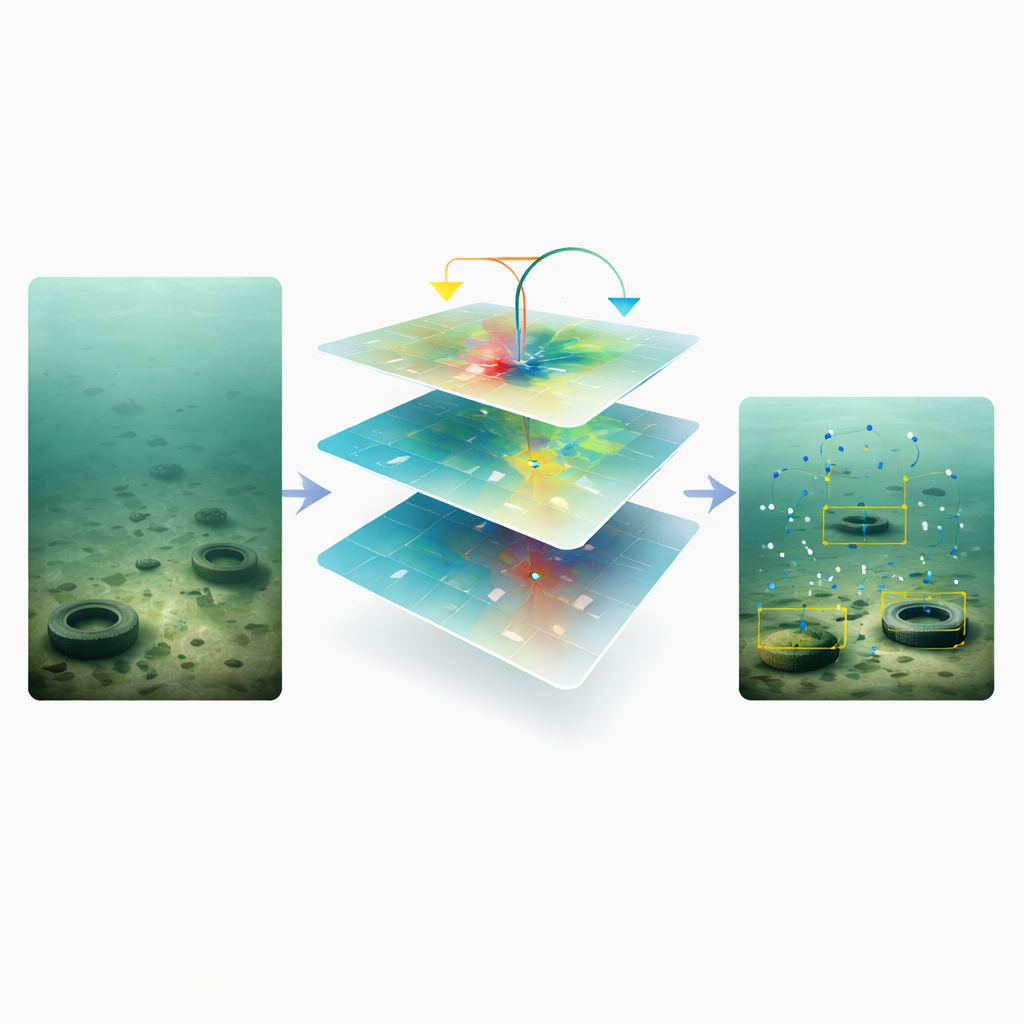
Farklı Ölçeklerdeki Küçük İpuçlarını Takip Etmek
İkinci aşama, Adaptif Özellik Modülasyonu (AFM), görme sistemlerindeki yaygın bir zayıflıkla ilgilenir: kaba ve ince çözünürlüklerden gelen bilgiler birleştirildiğinde küçük ölçekli ayrıntılar genellikle boğulur. AFM, önce boyutlarını ve kanallarını hizalayarak iki özellik haritasını bir araya getirir, sonra her dal için nazik, bağımsız kapılar hesaplar. Bir ölçeğin baskın olmasını zorlamak yerine, AFM her iki ölçeğin de yararlı sinyal taşıdığı durumlarda katkıda bulunmasına izin verir ve zayıf fakat önemli desenlerin kaybolmasını önlemek için bir artık kısayolu ekler. Bu dengeli çok-ölçekli füzyon, deniz hıyarları, denizyıldızları veya beton çatlakları gibi arkadan ancak zar zor ayırt edilebilen küçük hedefleri tespit etmekte özellikle faydalıdır.
Daha Esnek Bir Nihai Karar Verici
Son aşama DPNDyHead (Çift Havuzlama ve Normalleştirilmiş Dinamik Kafa), sistemin ne ve nerede olduğuna karar vermeden hemen önce özellikleri rafine eder. Bulanık veya bozulmuş su altı şekillerini daha iyi takip etmek için örnekleme noktalarını kaydıran deformable convolution (deformabl evrişim) fikrinden yararlanır. Çok farklı boyutlardaki nesneleri ele almak için DPNDyHead, ölçekler boyunca hem ortalama hem de maksimum havuzlama kullanır; küresel bağlamı kenarlar veya dokular gibi keskin yerel tepkilerle harmanlar. Bir normalizasyon adımı, görev-özgü aktivasyonlar üretilmeden önce özellik istatistiklerini dengeleyerek renk kaymalarının ve düzensiz aydınlatmanın etkisini azaltır. Birlikte, bu teknikler sınıflandırma (nesnenin ne olduğu) güvenini yerelleştirme (nerede olduğu) hassasiyetiyle hizalamaya yardımcı olur.
Gerçek Dünyada Ne Kadar İyi Çalışıyor?
Yazarlar YOLO-MFD'yi su ürünleri yetiştiriciliği ve açık deniz çiftliklerinden alınmış, birçok küçük, kalabalık hedef ve güçlü görüntü bozulması içeren iki kamuya açık su altı veri seti üzerinde test etti. Hem DUO hem de UDD üzerinde yeni çerçeve, klasik iki aşamalı dedektörleri, ankrsız yöntemleri, modern Transformer tabanlı modelleri ve son YOLO varyantlarını geride bıraktı. Daha yüksek ortalama Ortalama Hassasiyet (mAP) ve geri çağırma (recall) elde etti — yani hem daha fazla gerçek nesneyi buldu hem de daha az hata yaptı — ve bunu sadece birkaç milyon parametre ve ılımlı hesaplama gücü kullanarak başardı. Ayrıntılı deneyler, üç modülün (CUMANet, AFM ve DPNDyHead) her birinin ölçülebilir kazanımlar sağladığını ve bunların birleşiminin doğruluk, sağlamlık ve hız açısından en iyi genel dengeyi verdiğini gösterdi.
Daha Güvenli Kıyılar İçin Daha Net İçgörüler
Pratik açıdan, bu çalışma su altı robotlarına ve izleme sistemlerine kentsel kıyılar ve mühendislik nehirbankları boyunca ne olduğuna dair daha keskin, daha güvenilir bir görüş sunuyor. Bulanık suya, ölçek dengesizliğine ve hizalanmamış tahminlere doğrudan karşı koyan bir nesne algılayıcı tasarlayarak yazarlar altyapı sağlığını daha iyi izleyebilecek, ekolojik anketleri destekleyebilecek ve prefabrik kıyı yapılarının akıllı yönetimini yönlendirebilecek bir araç sağlıyor. Gelecekte daha geniş ortamları ve modelin daha hafif versiyonlarını inceleyen çalışmalarla, YOLO-MFD gibi yöntemler rutin su altı muayenesinin önemli bir parçası haline gelebilir ve kıyı şehirlerini ve iç su yollarını daha güvenli ve iyi korunmuş tutmaya yardımcı olabilir.
Atıf: Gang, Y., Li, T., Li, S. et al. YOLO-MFD: a multi-scale feature and dynamic head framework for prefabricated shoreline underwater object detection. Sci Rep 16, 10971 (2026). https://doi.org/10.1038/s41598-026-45591-1
Anahtar kelimeler: su altı nesne tespiti, kıyı altyapısı, bilgisayarlı görü, özerk su altı araçları, derin öğrenme