Clear Sky Science · he
YOLO-MFD: מסגרת תכונה רב-קנה ודינמית לזיהוי עצמים תת-מימיים על חוף מבנים prefab
עיניים חכמות מתחת לחופי העיר
כשהערים בונות יותר קירות, רציפים ומעקות מוכנים מראש לאורך נהרות ואגמים, חלק גדול מהתשתית הקריטית מסתתר מתחת למים. בדיקה האם הבלוקים הללו יציבים, סדוקים או מלאים בפסולת היא משימה קשה, במיוחד במים עמומים ושטחיים שבהם הטווח הראייה נמוך. מאמר זה מציג את YOLO-MFD, מערכת ראייה ממוחשבת חדשה המסייעת לרובוטים תת-מימיים לזהות עצמים קטנים וחיוורים לאורך החופים באופן אמין ומהיר יותר, גם כאשר המים עכורים והסצנה צפופה.
למה תמונות תת-מימיות כל כך קשות לפענוח
נהרות, אגמים ומי חוף עירוניים לעיתים נדירות שקופים לחלוטין. האור נספג ומתפזר, הצבעים נמשכים לגוונים ירוקים או כחולים, וחלקיקים תלויים מטשטשים קצוות. יצורים קטנים, אשפה ימייתית או ליקויים בבלוקים מוכנים מראש יכולים להיות זעירים, בעלי ניגוד נמוך וצפופים. מערכות זיהוי סטנדרטיות, שתוכננו במקור לסצנות רחוב ברורות, נוטות להחמיץ מטרות אלה או לבלבל ביניהן לבין הרקע. במקביל, רובוטי בדיקה ומכשירים משובצים המשמשים בקרבת החוף מוגבלים בכוח עיבוד, לכן כל פתרון חייב להיות גם מדויק וגם יעיל.
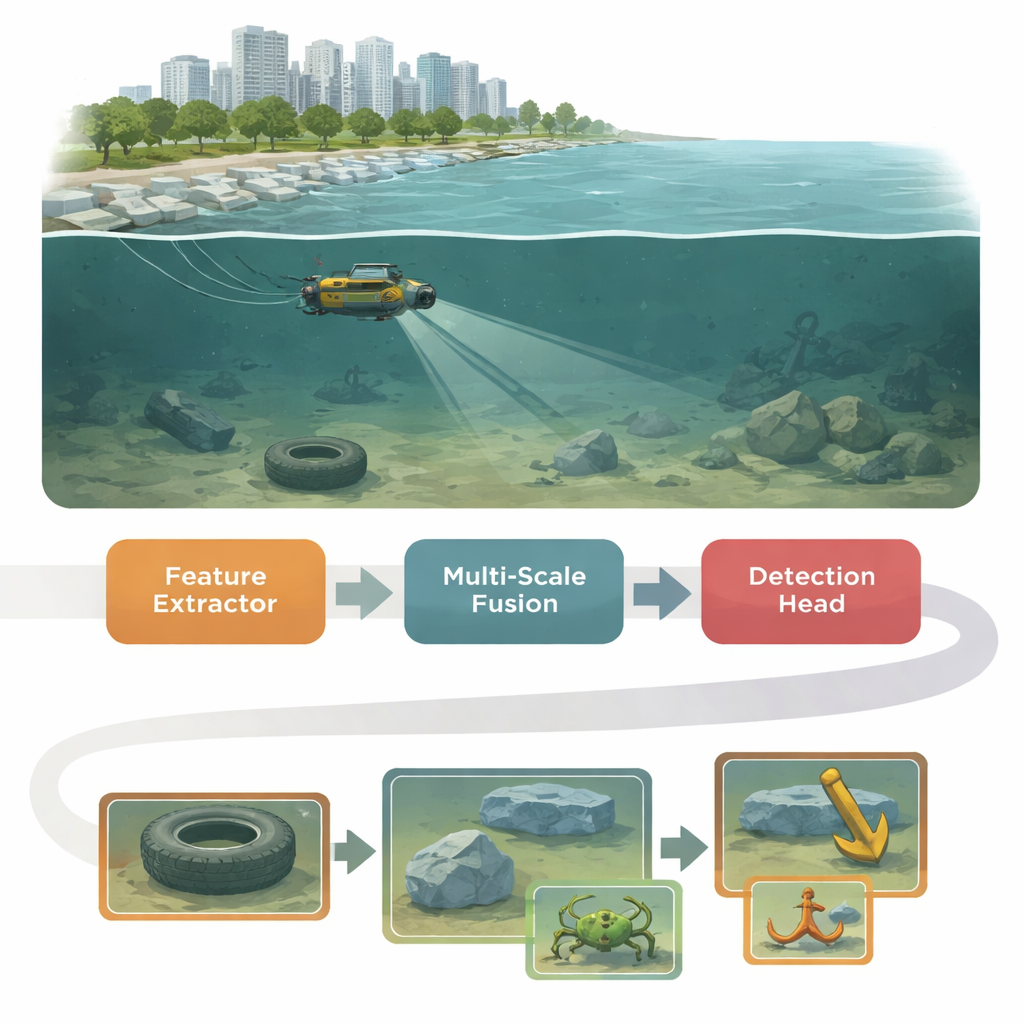
מוח בת שלושה חלקים למים עכורים
YOLO-MFD מבוסס על משפחת YOLO הפופולרית של גלאים בזמן אמת אך מעצב מחדש את ה"מוח" הפנימי בשלושה שלבים מתואמים. ראשית, גב-רשת חדש בשם CUMANet (Cross-scale Unified Multi-scale Attention Network) לומד להפיק תכונות מהתמונות תוך מתן תשומת לב להקשר רחב. הוא משתמש בסניפים מקבילים ובקונבולוציה מיוחדת שמתנהגת כמו מודול רב-ענפי באימון אך מפשטת לפעולה יחידה ויעילה בזמן פריסה. זה מסייע לרשת להסתכל מעבר לרעשים מקומיים, ללכוד רמזים טווח-ארוך ולשמר פרטים חשובים שלא יימרחו בעקבות עכירות וצימוד צבעים.
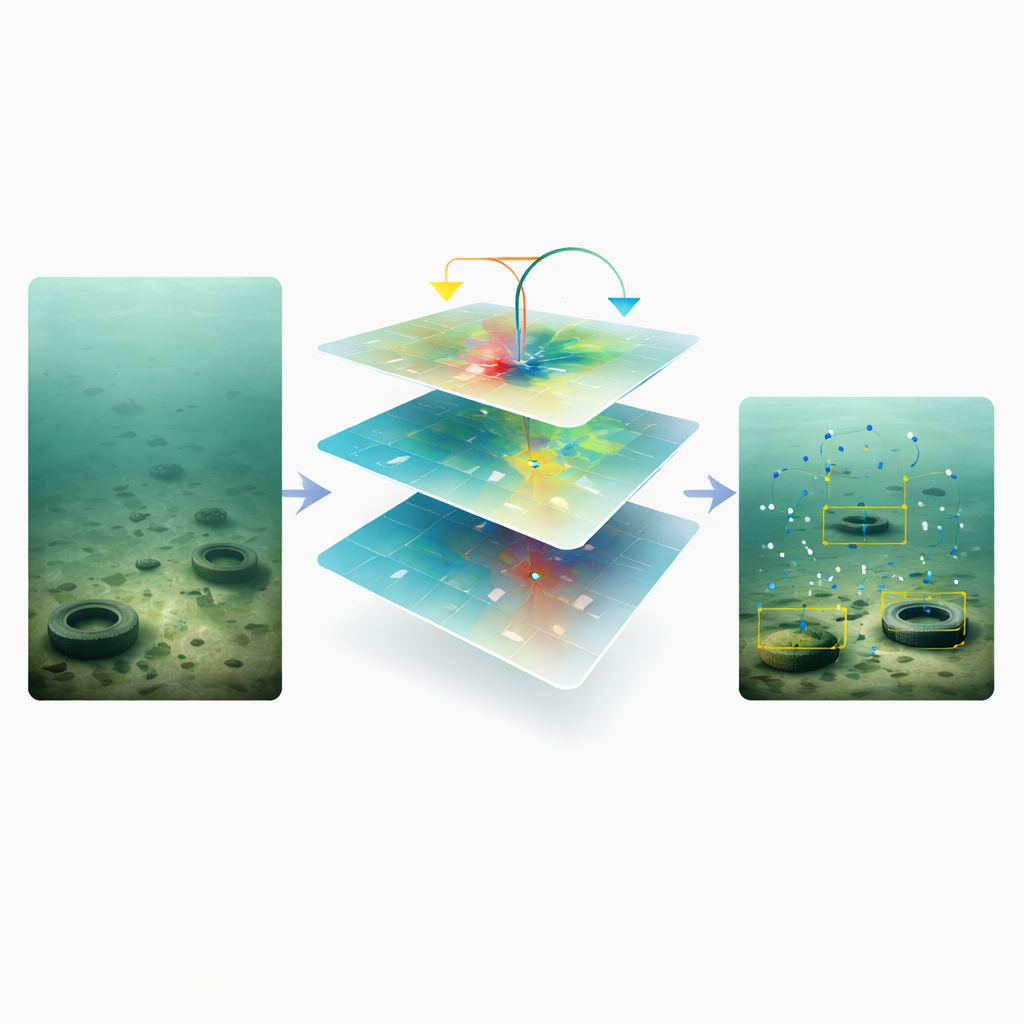
מעקב אחר רמזים זעירים בקנה מידה שונה
השלב השני, Adaptive Feature Modulation (AFM), מתמודד עם חולשה נפוצה במערכות ראייה: כאשר משלבים מידע מרזולוציות גסות ועדינות, פרטים בקנה מידה קטן לרוב טובעים. AFM מאחד שתי מפות תכונה על ידי יישור גדלים וערוצים, ואז חישוב שערים עדינים ונפרדים לכל ענף. במקום לכפות על קנה מידה אחד להשתלט, AFM מאפשר לשניהם לתרום בכל פעם שיש להם רמזים שימושיים, ומוסיף קיצור שארתי כדי למנוע אובדן דפוסים חלשים אך חשובים. מיזוג רב-קנה מידה מאוזן זה מועיל במיוחד לזיהוי חסילוני ים קטנים, כוכבי ים או סדקים בבטון שהם בקושי מובחנים מהרקע.
מחליט סופי גמיש יותר
השלב הסופי, DPNDyHead (Dual-Pooling and Normalized Dynamic Head), מלטש תכונות רגע לפני שהמערכת מחליטה מה והיכן נמצאים העצמים. הוא שואב את רעיון הקונבולוציות המתעוותות, שמזיזות את נקודות הדגימה שלהן כדי לעקוב טוב יותר אחרי צורות מטושטשות או מעוותות תחת המים. כדי להתמודד עם עצמים בגדלים שונים מאוד, DPNDyHead משתמש הן ב-pooling ממוצע והן ב-max pooling על פני קנה מידה, ומשלב הקשר גלובלי עם תגובות מקומיות חדות כגון קצוות או מרקמים. שלב נורמליזציה מייצב את סטטיסטיקות התכונה לפני יצירת האקטיבציות הספציפיות למשימה, ומקטין את השפעת הזזות צבע ותאורה לא אחידה. יחד, הטריקים האלה מסייעים ליישר בין הביטחון של הסיווג (מהו העצם) לבין דיוק המיקום (איפה הוא).
כמה טוב זה עובד בעולם האמיתי?
המחברים בחנו את YOLO-MFD על שתי מערכות נתונים תת-מימיות ציבוריות ממחלקות גידול ימי וחוות ים פתוח, הכוללות הרבה מטרות קטנות וצפופות ופגיעה חזקה באיכות התמונה. הן ב-DUO והן ב-UDD, המסגרת החדשה התעלה על גלאים קלאסיים בשני שלבים, שיטות ללא עוגן, מודלים מודרניים מבוססי Transformer וגרסאות YOLO עדכניות. היא השיגה ממוצע דיוק גבוה יותר וזכירה משופרת — כלומר מצאה יותר עצמים אמיתיים ועשתה פחות טעויות — תוך שימוש בכמה מיליוני פרמטרים בלבד וכוח עיבוד צנוע. ניסויים מפורטים הראו שכל אחד משלושת המודולים (CUMANet, AFM ו-DPNDyHead) תרם שיפורי מדידה, והשילוב שלהם הביא לאיזון הטוב ביותר בין דיוק, חסינות ומהירות.
תובנה ברורה לחופים בטוחים יותר
במונחים מעשיים, עבודה זו מציעה לרובוטים תת-מימיים ולמערכות ניטור תצוגה חדה ואמינה יותר של מה שעומד לאורך חופים עירוניים וחופי נהר מהונדסים. על ידי עיצוב גלאי עצמים שמקביל במפורש לעכירות מים, חוסר איזון בקנה מידה וניבויים לא מיושרים, הכותבים מספקים כלי שיכול לעקוב טוב יותר אחרי בריאות התשתית, לתמוך בסקרים אקולוגיים ולהנחות ניהול חכם של מבני חוף מוכנים מראש. ככל שעבודות עתידיות יחקרו סביבות רחבות יותר ואף גרסאות קלות יותר של המודל, שיטות כמו YOLO-MFD עלולות להפוך לחלק מרכזי בבדיקות תת-מימיות שגרתיות, ולסייע לשמור על ערי חוף ומים פנימיים בטוחים ומתוחזקים בצורה טובה יותר.
ציטוט: Gang, Y., Li, T., Li, S. et al. YOLO-MFD: a multi-scale feature and dynamic head framework for prefabricated shoreline underwater object detection. Sci Rep 16, 10971 (2026). https://doi.org/10.1038/s41598-026-45591-1
מילות מפתח: זיהוי עצמים תת-מימי, תשתיות חוף, ראייה ממוחשבת, רכבים תת-מימיים אוטונומיים, למידה עמוקה