Clear Sky Science · nl
YOLO-MFD: een multi-schaal feature- en dynamische head-architectuur voor detectie van voorgefabriceerde oeverobjecten onder water
Slimmere ogen onder stedelijke oeverlijnen
Terwijl steden meer muren, steigers en voorgefabriceerde beschoeiingen langs rivieren en meren bouwen, eindigt veel cruciale infrastructuur onder water. Controleren of deze blokken stabiel zijn, gebarsten of vol puin liggen, is lastig, vooral in troebel, ondiep water waar het zicht slecht is. Dit artikel introduceert YOLO-MFD, een nieuw computer-visionsysteem dat onderwatervoering helpt om kleine, zwakke objecten langs oevers betrouwbaarder en sneller te vinden, zelfs wanneer het water troebel is en de scène druk.
Waarom onderwaterfoto’s zo moeilijk te lezen zijn
Rivieren, meren en stedelijke oeverwateren zijn zelden kristalhelder. Licht wordt geabsorbeerd en verstrooid, kleuren verschuiven naar groen of blauw en zwevende deeltjes vervagen randen. Kleine dieren, marien zwerfafval of defecten in voorgefabriceerde oeverblokken kunnen klein, laagcontrast en dicht opeengepakt zijn. Standaard objectdetectiesystemen, oorspronkelijk ontworpen voor heldere straatbeelden, missen deze doelen vaak of verwarren ze met achtergrondruis. Tegelijkertijd hebben inspectierobots en ingebedde apparaten die nabij oevers worden gebruikt beperkte rekenkracht, dus elke oplossing moet zowel nauwkeurig als efficiënt zijn.
Een drieledige 'hersenen' voor troebel water
YOLO-MFD bouwt voort op de populaire YOLO-familie van real-time detectors, maar herontwerpt zijn interne “hersenen” in drie gecoördineerde stadia. Ten eerste leert een nieuwe backbone, CUMANet (Cross-scale Unified Multi-scale Attention Network), features uit beelden te extraheren met aandacht voor brede context. Het gebruikt parallelle takken en een gespecialiseerde convolutie die zich tijdens training gedraagt als een multi-branch module, maar bij inzet vereenvoudigt tot een enkele, efficiënte operatie. Dit helpt het netwerk voorbij lokale ruis te kijken, langetermijnsignalen te vangen en belangrijke details te behouden die anders door troebelheid en kleurvervorming zouden vervagen.
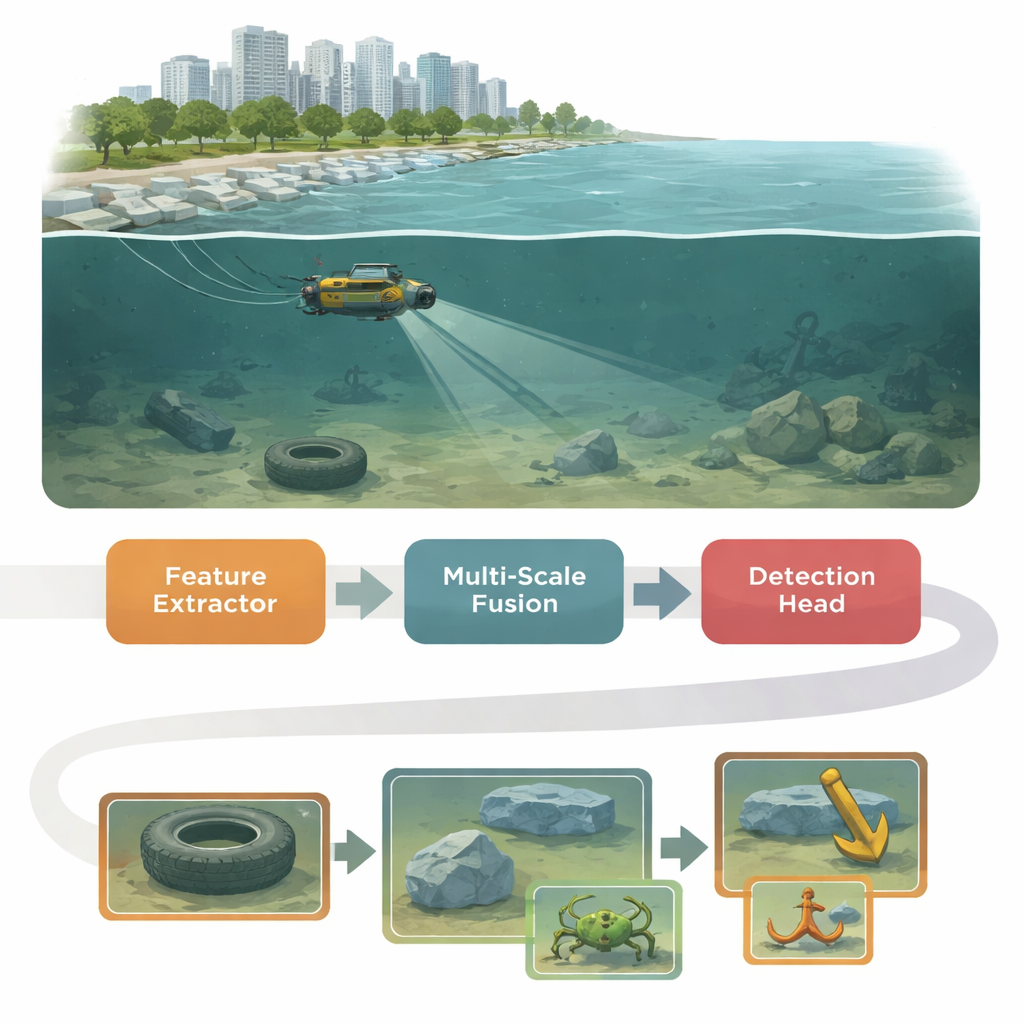
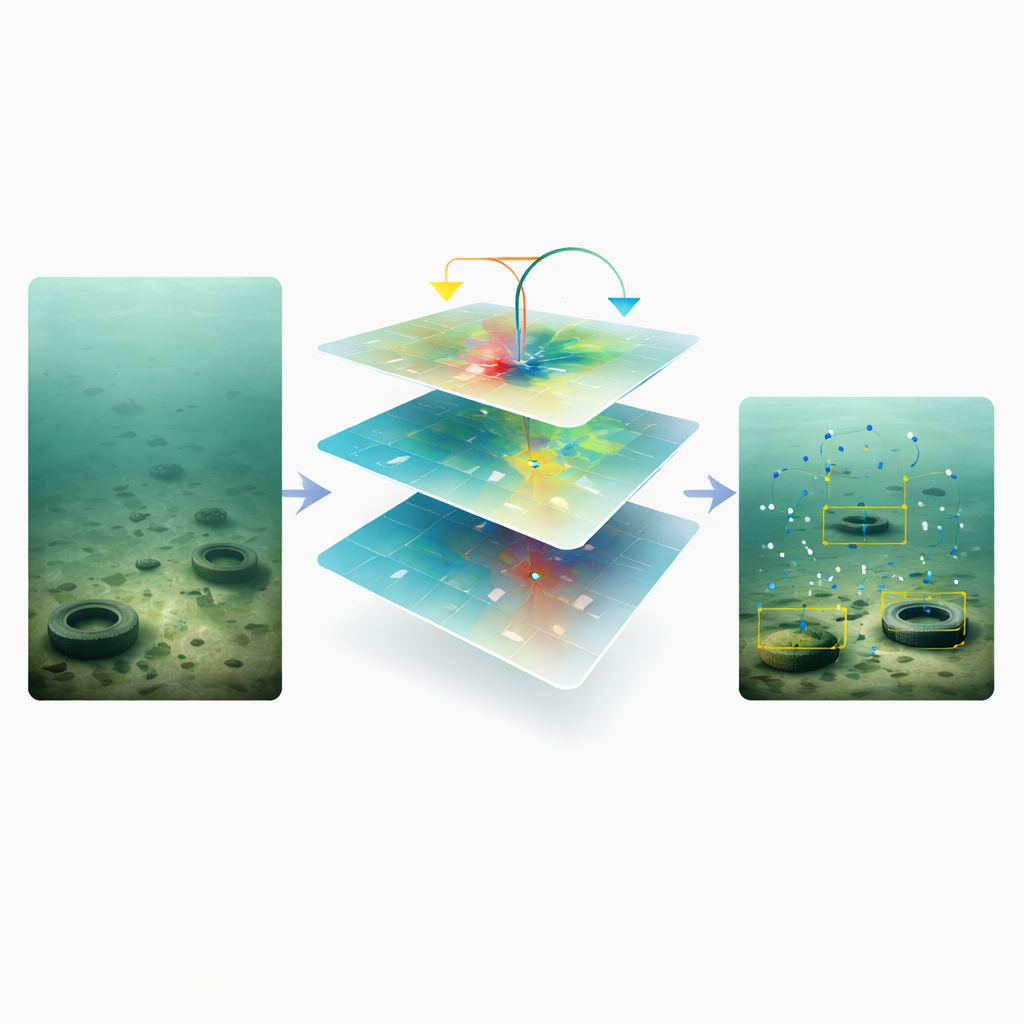
Het bijhouden van kleine aanwijzingen op verschillende schalen
Het tweede stadium, Adaptive Feature Modulation (AFM), pakt een veelvoorkomend zwak punt in visiesystemen aan: bij het combineren van informatie van grof- en fijnresoluties raken kleinschalige details vaak ondergesneeuwd. AFM brengt twee featuremaps samen door eerst hun afmetingen en kanalen op elkaar af te stemmen en vervolgens zachte, onafhankelijke poorten voor elke tak te berekenen. In plaats van één schaal te laten domineren, laat AFM beide bijdragen wanneer ze nuttige signalen bevatten, en voegt een residuele shortcut toe om te voorkomen dat zwakke maar belangrijke patronen verloren gaan. Deze gebalanceerde multi-schaalfusie is vooral nuttig om kleine zeekomkommers, zeesterren of scheuren in beton te ontdekken die nauwelijks uit de achtergrond steken.
Een flexibeler eindbesluitvormer
Het laatste stadium, DPNDyHead (Dual-Pooling and Normalized Dynamic Head), verfijnt features vlak voordat het systeem beslist wat en waar objecten zijn. Het leent het idee van deformable convolutions, die hun samplepunten verplaatsen om beter vervaagde of vervormde vormen onder water te volgen. Om objecten van sterk uiteenlopende afmetingen te behandelen, gebruikt DPNDyHead zowel gemiddelde als max pooling over schalen, waarmee globale context wordt gemengd met scherpe lokale responsen zoals randen of texturen. Een normalisatiestap stabiliseert de feature-statistieken voordat taak-specifieke activaties worden gegenereerd, wat de invloed van kleurverschuivingen en ongelijkmatige verlichting vermindert. Samen helpen deze trucs om de betrouwbaarheid van classificatie (wat het object is) beter af te stemmen op de precisie van lokalisatie (waar het zich bevindt).
Hoe goed werkt het in de praktijk?
De auteurs testten YOLO-MFD op twee openbare onderwaterdatasets uit aquacultuur en openzee-boerderijen, die veel kleine, dicht opeengepakte doelen en sterke beelddegradatie bevatten. Zowel op DUO als UDD overtrof het nieuwe kader klassieke two-stage detectors, anchor-free methoden, moderne Transformer-gebaseerde modellen en recente YOLO-varianten. Het behaalde hogere mean Average Precision en recall — wat betekent dat het meer echte objecten vond en minder fouten maakte — terwijl het slechts enkele miljoenen parameters en bescheiden rekenkracht gebruikte. Gedetailleerde experimenten toonden aan dat elk van de drie modules (CUMANet, AFM en DPNDyHead) meetbare verbeteringen bijdroeg, en hun combinatie het beste algehele evenwicht tussen nauwkeurigheid, robuustheid en snelheid opleverde.
Helderder inzicht voor veiligere oevers
In praktische zin biedt dit werk onderwaterrobots en monitoringsystemen een scherper, betrouwbaarder beeld van wat zich langs stedelijke oeverlijnen en geconstrueerde rivieroevers bevindt. Door een objectdetector te ontwerpen die expliciet troebel water, schaalonevenwichtigheid en onjuiste voorspellingen tegengaat, leveren de auteurs een hulpmiddel dat infrastructuurgezondheid beter kan volgen, ecologische onderzoeken kan ondersteunen en het intelligente beheer van voorgefabriceerde oeverconstructies kan helpen sturen. Naarmate toekomstig werk bredere omgevingen en nog lichtere versies van het model verkent, zouden methoden zoals YOLO-MFD een sleutelrol kunnen spelen in routinematige onderwaterinspecties, waarmee kuststeden en binnenwateren veiliger en beter onderhouden blijven.
Bronvermelding: Gang, Y., Li, T., Li, S. et al. YOLO-MFD: a multi-scale feature and dynamic head framework for prefabricated shoreline underwater object detection. Sci Rep 16, 10971 (2026). https://doi.org/10.1038/s41598-026-45591-1
Trefwoorden: detectie van objecten onder water, oeverinfrastructuur, computer vision, autonome onderwatervoertuigen, deep learning