Clear Sky Science · ja
YOLO-MFD: プレハブ護岸の水中物体検出のためのマルチスケール特徴と動的ヘッドフレームワーク
都市の岸辺の下にある、より賢い観測
都市が河川や湖沿いに壁や桟橋、プレハブの護岸を増やすにつれて、重要なインフラの多くが水中に隠れてしまいます。これらのブロックが安定しているか、ひび割れているか、漂流物で覆われていないかを点検するのは難しく、特に濁った浅瀬では視界が悪くなります。本論文は YOLO-MFD を紹介します。これは水中ロボットが岸辺で小さく薄い物体を、濁った水や物が混み合った場面でもより確実かつ迅速に見つけられるようにする新しいコンピュータビジョンシステムです。
なぜ水中画像は読み取りにくいのか
河川や湖、都市の岸辺の水はめったに澄んでいません。光は吸収・散乱され、色は緑や青に偏り、浮遊粒子が輪郭をぼかします。小さな生物、海洋ごみ、プレハブ護岸の欠陥はごく小さくコントラストが低く、密集していることが多い。元々は澄んだ街中のシーン向けに設計された標準的な物体検出システムは、これらの対象を見落としたり背景ノイズと混同したりしがちです。同時に、岸辺で使われる点検ロボットや組込み機器は計算資源が限られているため、解決策は高精度であると同時に効率的でなければなりません。
濁った水に対応する三段構えの“脳”
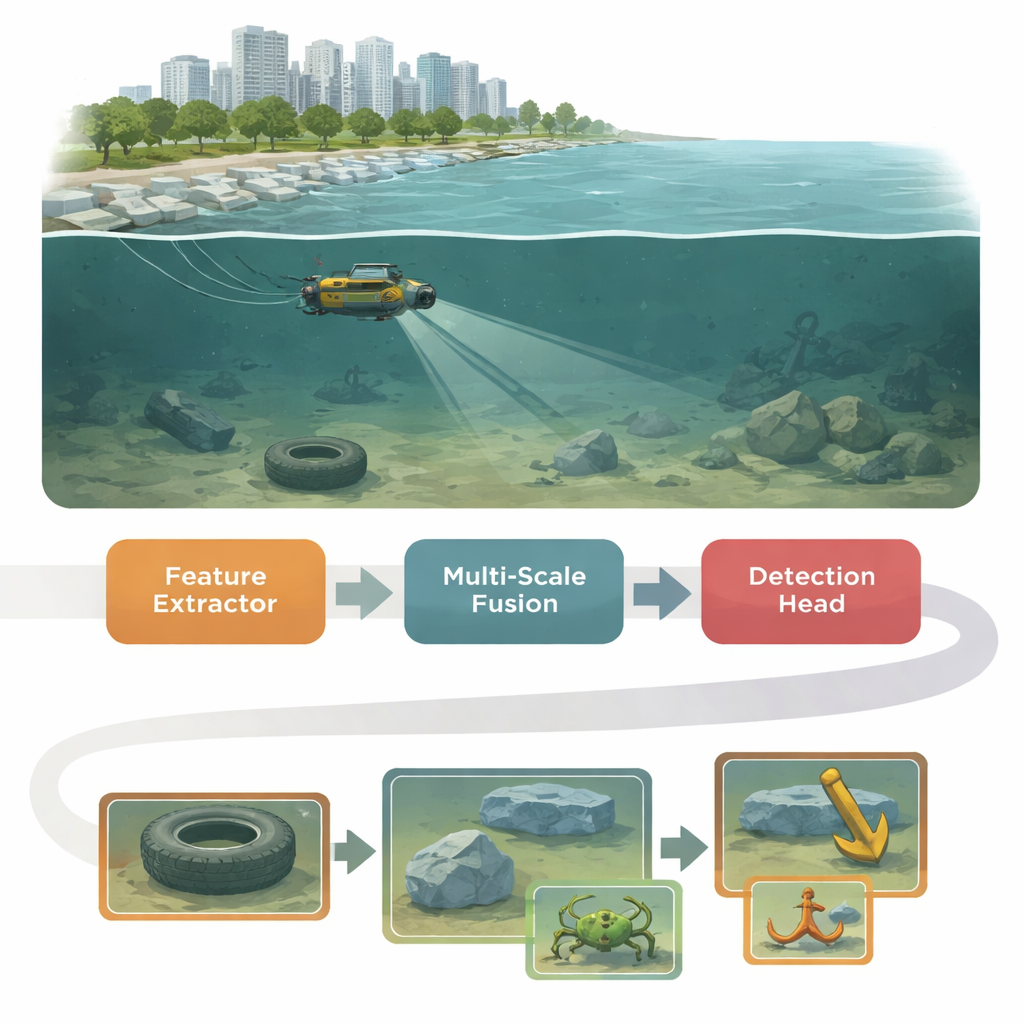
YOLO-MFD はリアルタイム検出器で知られる YOLO 系に基づきますが、その内部“脳”を三つの協調した段階で再構成しています。まず CUMANet(Cross-scale Unified Multi-scale Attention Network)と呼ばれる新しいバックボーンが、広い文脈に注意を払いつつ画像から特徴を抽出することを学習します。並列ブランチと、訓練時にはマルチブランチモジュールのように振る舞い、展開時には単一で効率的な演算に簡略化される特殊な畳み込みを用います。これにより局所的なノイズを超えて長距離の手がかりをとらえ、濁りや色変動で重要なディテールが失われるのを防ぎます。
異なるスケールでの小さな手がかりを見落とさない
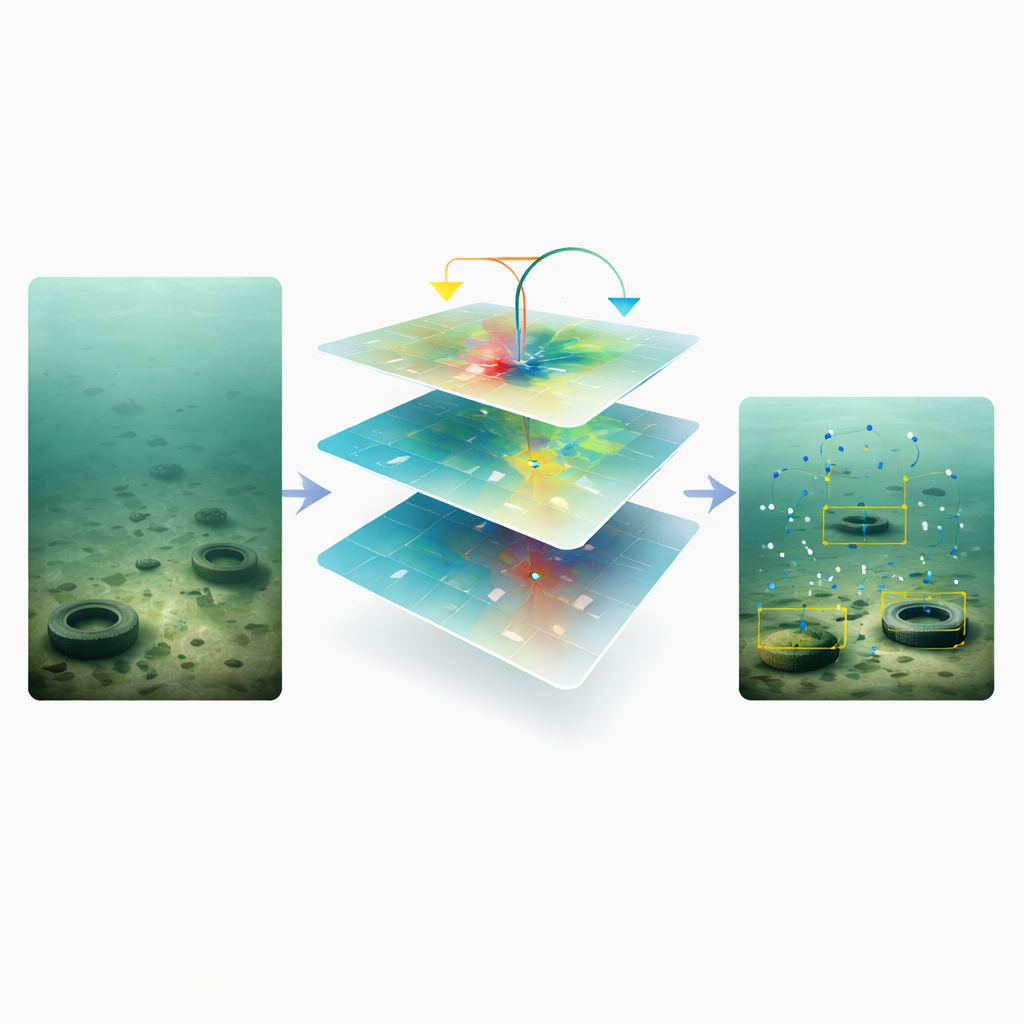
第二段階である Adaptive Feature Modulation(AFM)は、視覚システムの一般的な弱点に取り組みます。粗い解像度と細かい解像度の情報を統合する際に、小スケールの詳細が埋もれてしまうことがよくあります。AFM はまず二つの特徴マップのサイズとチャネルを整合させ、次に各ブランチに対して穏やかな独立ゲートを計算します。一方のスケールが他方を支配するのではなく、有用な信号がある場合は両者が寄与できるようにし、残差ショートカットを加えて弱くとも重要なパターンを失わないようにします。このバランスの取れたマルチスケール融合は、背景にほとんど溶け込むナマコやヒトデ、小さなコンクリートのひび割れの検出に特に有効です。
より柔軟な最終判断部
最終段階である DPNDyHead(Dual-Pooling and Normalized Dynamic Head)は、システムが物体の種類と位置を決定する直前に特徴を洗練します。これは変形畳み込みのアイデアを取り入れており、水中でぼやけたり歪んだ形状に合わせてサンプリング点を移動させます。非常に異なるサイズの物体に対応するため、DPNDyHead はスケール間で平均プーリングと最大プーリングの両方を用い、グローバルな文脈とエッジやテクスチャといった鋭い局所応答を融合します。正規化ステップはタスク固有の活性化を生成する前に特徴統計を安定化させ、色の偏りや不均一な照明の影響を減らします。これらの工夫により、分類(物体が何であるか)の信頼度と位置特定(どこにあるか)の精度が一致しやすくなります。
実世界での性能はどれほどか
著者らは YOLO-MFD を、養殖場や沖合のファームからの二つの公開水中データセットで評価しました。これらは小さく密集したターゲットや強い画像劣化を含みます。DUO と UDD の両データセットで、新しいフレームワークは従来の二段階検出器、アンカーフリー手法、最新のトランスフォーマーベースのモデル、最近の YOLO バリアントを上回りました。平均適合率(mAP)と再現率の向上を達成し──つまり、真の物体をより多く見つけ誤認を減らした──わずかな百万単位のパラメータ数と控えめな計算資源で動作します。詳細な実験により、CUMANet、AFM、DPNDyHead の各モジュールがそれぞれ寄与を持ち、それらを組み合わせることで精度、堅牢性、速度の最良のバランスが得られることが示されました。
より明瞭な知見で安全な岸辺へ
実用面では、本研究は水中ロボットや監視システムに対して都市の岸辺や人工河岸にあるものをより鮮明かつ信頼性高く把握する手段を提供します。濁った水、スケールの不均衡、予測のずれに明示的に対抗する物体検出器を設計することで、著者らはインフラの健康監視、環境調査、プレハブ護岸のスマート管理を支援するツールを示しました。将来の研究でより広い環境やさらに軽量なモデルが探求されれば、YOLO-MFD のような手法は定期的な水中点検の重要な一部となり、沿岸都市や内陸水路の安全性と維持管理に寄与する可能性があります。
引用: Gang, Y., Li, T., Li, S. et al. YOLO-MFD: a multi-scale feature and dynamic head framework for prefabricated shoreline underwater object detection. Sci Rep 16, 10971 (2026). https://doi.org/10.1038/s41598-026-45591-1
キーワード: 水中物体検出, 岸辺インフラ, コンピュータビジョン, 自律型水中機器, 深層学習