Clear Sky Science · pt
YOLO-MFD: uma estrutura de características multiescala e cabeça dinâmica para detecção subaquática de objetos em margens pré-fabricadas
Olhos mais inteligentes sob as margens das cidades
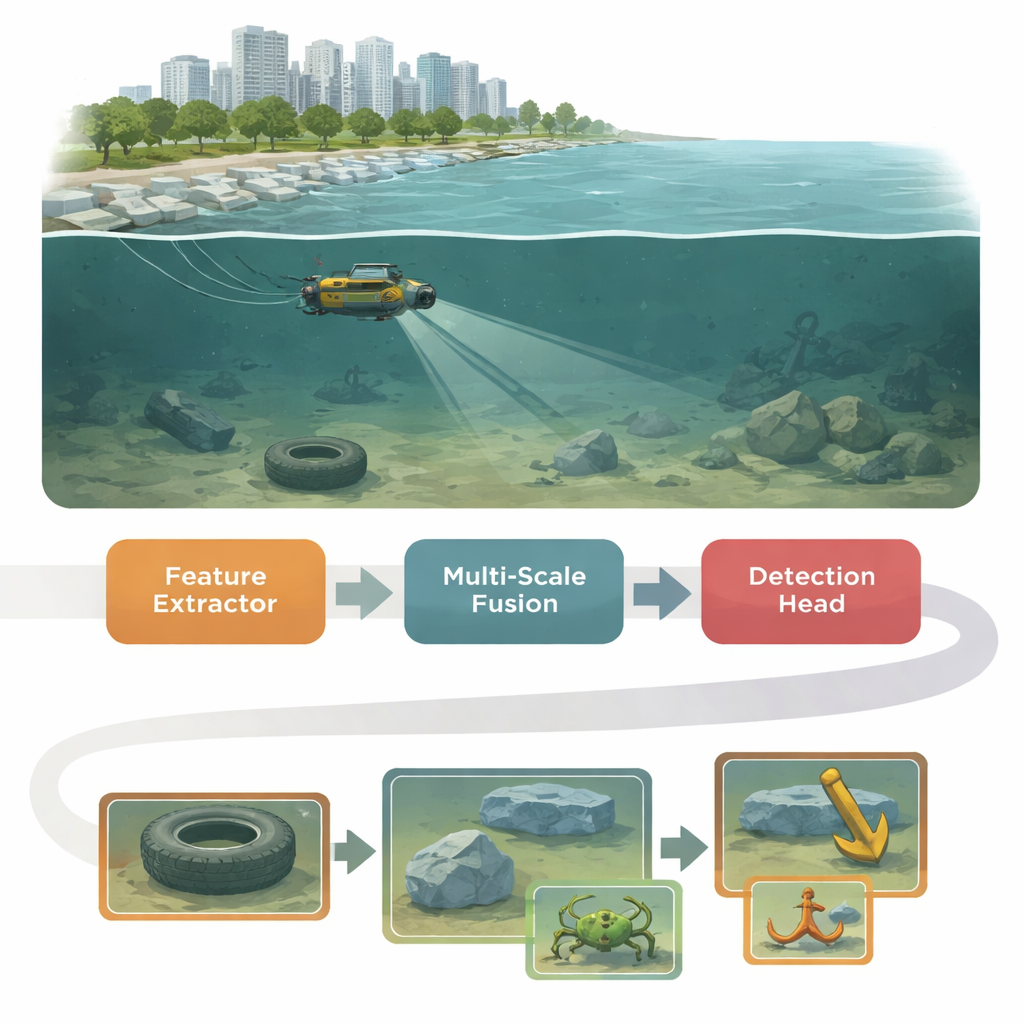
À medida que as cidades constroem mais muros, píeres e enrocamentos pré-fabricados ao longo de rios e lagos, grande parte da infraestrutura crítica fica submersa. Verificar se esses blocos estão estáveis, rachados ou acumulados de detritos é difícil, especialmente em águas rasas e turvas, onde a visibilidade é fraca. Este artigo apresenta o YOLO-MFD, um novo sistema de visão computacional que ajuda robôs subaquáticos a detectar objetos pequenos e tênues ao longo das margens com mais confiabilidade e rapidez, mesmo quando a água está turva e a cena está cheia.
Por que imagens subaquáticas são tão difíceis de interpretar
Rios, lagos e águas costeiras urbanas raramente são cristalinos. A luz é absorvida e espalhada, as cores deslocam-se para o verde ou azul, e partículas em suspensão borram contornos. Pequenos organismos, lixo marinho ou defeitos em blocos pré-fabricados podem ser minúsculos, de baixo contraste e densamente agrupados. Sistemas padrão de detecção de objetos, originalmente projetados para cenas urbanas claras, tendem a perder esses alvos ou confundí-los com o fundo. Ao mesmo tempo, robôs de inspeção e dispositivos embarcados usados perto das margens têm poder computacional limitado, então qualquer solução precisa ser tanto precisa quanto eficiente.
Um cérebro em três partes para águas turvas
O YOLO-MFD se baseia na popular família YOLO de detectores em tempo real, mas remodela seu “cérebro” interno em três estágios coordenados. Primeiro, um novo backbone chamado CUMANet (Cross-scale Unified Multi-scale Attention Network) aprende a extrair características das imagens enquanto presta atenção ao contexto amplo. Ele usa ramos paralelos e uma convolução especializada que se comporta como um módulo multi-ramo durante o treinamento, mas se simplifica para uma única operação eficiente durante a implantação. Isso ajuda a rede a olhar além do ruído local, capturar pistas de longo alcance e preservar detalhes importantes que podem ser apagados pela turvação e pela distorção de cor.
Acompanhar pistas minúsculas em diferentes escalas
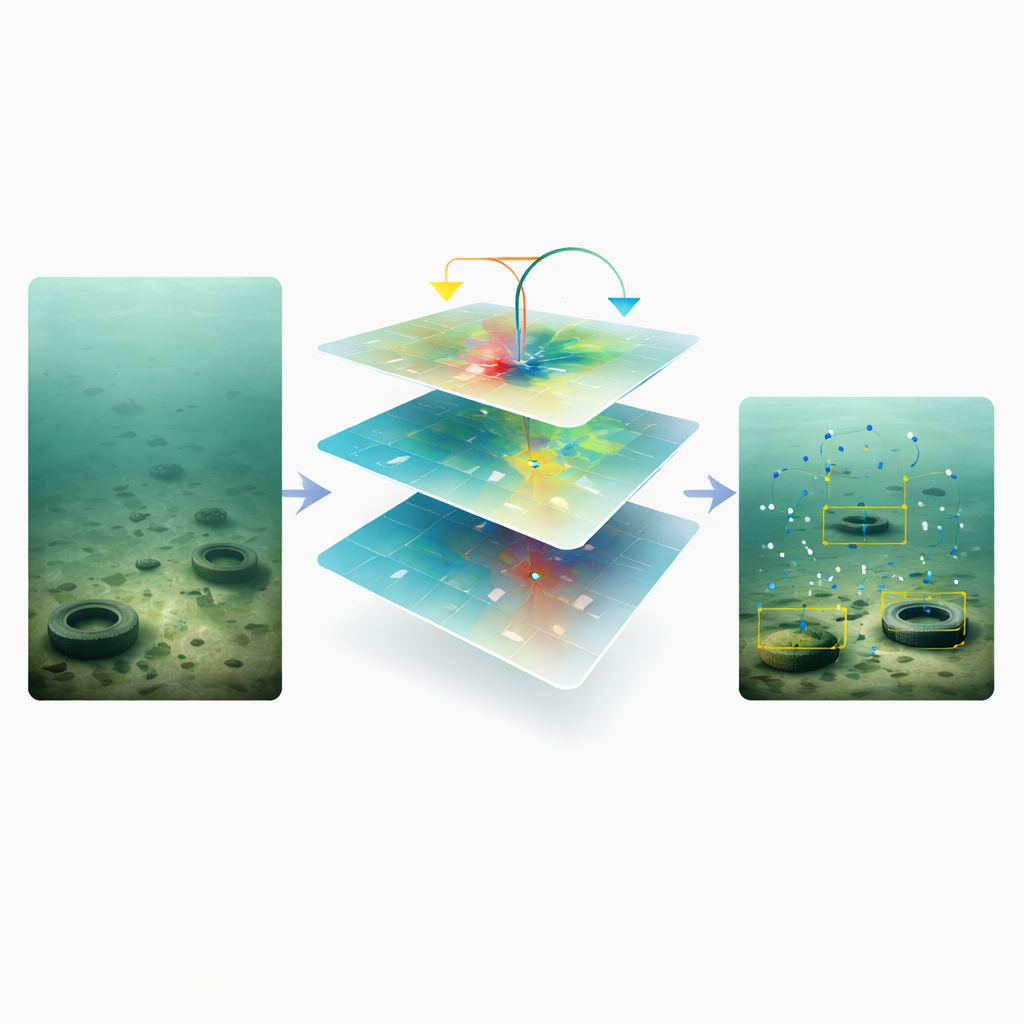
O segundo estágio, Adaptive Feature Modulation (AFM), aborda uma fraqueza comum em sistemas de visão: ao combinar informações de resoluções grosseiras e finas, detalhes de pequena escala frequentemente se perdem. O AFM reúne dois mapas de características alinhando primeiro seus tamanhos e canais, e então computando portas suaves e independentes para cada ramo. Em vez de forçar uma escala a dominar, o AFM permite que ambas contribuam sempre que carregarem sinais úteis, e adiciona um atalho residual para evitar a perda de padrões fracos, porém importantes. Essa fusão multiescala equilibrada é especialmente útil para detectar pepinos-do-mar pequenos, estrelas-do-mar ou fissuras no concreto que mal se destacam do fundo.
Um decisor final mais flexível
O estágio final, DPNDyHead (Dual-Pooling and Normalized Dynamic Head), refina as características pouco antes do sistema decidir o que e onde estão os objetos. Ele toma emprestada a ideia de convoluções deformáveis, que deslocam seus pontos de amostragem para seguir melhor formas borradas ou distorcidas debaixo d’água. Para lidar com objetos de tamanhos muito diferentes, o DPNDyHead usa tanto pooling médio quanto máximo através das escalas, misturando contexto global com respostas locais nítidas, como bordas ou texturas. Uma etapa de normalização estabiliza as estatísticas das características antes de gerar ativações específicas para cada tarefa, reduzindo o impacto de mudanças de cor e iluminação desigual. Juntas, essas técnicas ajudam a alinhar a confiança da classificação (o que é o objeto) com a precisão da localização (onde ele está).
Quão bem funciona no mundo real?
Os autores testaram o YOLO-MFD em dois conjuntos de dados subaquáticos públicos de aquicultura e fazendas marinhas abertas, que incluem muitos alvos pequenos, densos e forte degradação de imagem. Tanto no DUO quanto no UDD, a nova estrutura superou detectores clássicos de duas etapas, métodos sem âncora, modelos modernos baseados em Transformers e variantes recentes do YOLO. Alcançou maior média de Precisão Média (mAP) e recall — o que significa que encontrou mais objetos verdadeiros e cometeu menos erros — usando apenas alguns milhões de parâmetros e poder computacional moderado. Experimentos detalhados mostraram que cada um dos três módulos (CUMANet, AFM e DPNDyHead) contribuiu com ganhos mensuráveis, e a combinação deles resultou no melhor equilíbrio geral entre precisão, robustez e velocidade.
Visão mais clara para margens mais seguras
Em termos práticos, este trabalho oferece a robôs subaquáticos e sistemas de monitoramento uma visão mais nítida e confiável do que está ao longo de margens urbanas e margens fluviais engineered. Ao projetar um detector de objetos que combate explicitamente água turva, desequilíbrio de escala e previsões desalinhadas, os autores fornecem uma ferramenta que pode acompanhar melhor a saúde da infraestrutura, apoiar levantamentos ecológicos e orientar a gestão inteligente de estruturas pré-fabricadas de margem. Conforme trabalhos futuros explorarem ambientes mais amplos e versões ainda mais leves do modelo, métodos como o YOLO-MFD podem se tornar parte fundamental da inspeção subaquática rotineira, ajudando a manter cidades costeiras e vias interiores mais seguras e melhor conservadas.
Citação: Gang, Y., Li, T., Li, S. et al. YOLO-MFD: a multi-scale feature and dynamic head framework for prefabricated shoreline underwater object detection. Sci Rep 16, 10971 (2026). https://doi.org/10.1038/s41598-026-45591-1
Palavras-chave: detecção de objetos subaquáticos, infraestrutura de margens, visão computacional, veículos subaquáticos autônomos, aprendizado profundo