Clear Sky Science · tr
Uzaktan algılama görüntülerinde küçük nesne tespiti için hafif model LMW-YOLO
Uzaydan Küçük Şeyleri Görmek
Şehir trafiğinden bir limandaki gemilere kadar, Dünya’daki birçok önemli unsur hava ve uydu fotoğraflarında küçük noktalar halinde görünür. Ancak bilgisayarlara bu küçük nesneleri güvenilir şekilde öğretmek şaşırtıcı derecede zordur; özellikle drone veya küçük uydular gibi sınırlı kaynaklı cihazlarda. Bu makale, büyük ve karmaşık uzaktan algılama görüntülerinde çok küçük nesneleri ağır hesaplama gerektirmeden bulmak üzere özel olarak tasarlanmış kompakt ama güçlü bir görsel sistem olan LMW-YOLO’yu tanıtıyor.
Neden Küçük Hedefleri Bulmak Zor?
Uzaktan algılama görüntüleri yükseklikten alındığı için arabalar, tekneler ve insanlar genellikle yalnızca birkaç piksel genişliğindedir. Popüler YOLO ailesi gibi standart nesne algılayıcılar, işlemi hızlandırmak ve üst düzey desenleri yakalamak için görüntüleri katman katman küçültür. Ancak yalnızca 5–10 piksel genişliğindeki nesneler için bu örnekleme azalması, ağ daha nesneleri “görmeden” önce onların kaybolmasına neden olabilir. Bu sorunu çözme çabaları genellikle daha derin ağlara, dikkat (attention) mekanizmalarına veya Transformer tarzı modellere dayanmıştır. Bu yaklaşımlar doğruluğu artırabilir, fakat bellek ve güç kısıtlı drone, uydu veya uç cihazlar için genellikle çok ağır olurlar. Modelleri küçük tutma ile karmaşık binalar, ağaçlar ve su gibi arka planlarda çok küçük hedefleri tanıyacak yeterli ayrıntıyı koruma arasında bir gerilim vardır.
Ağı Her Seviyeye Göre Özelleştirmek
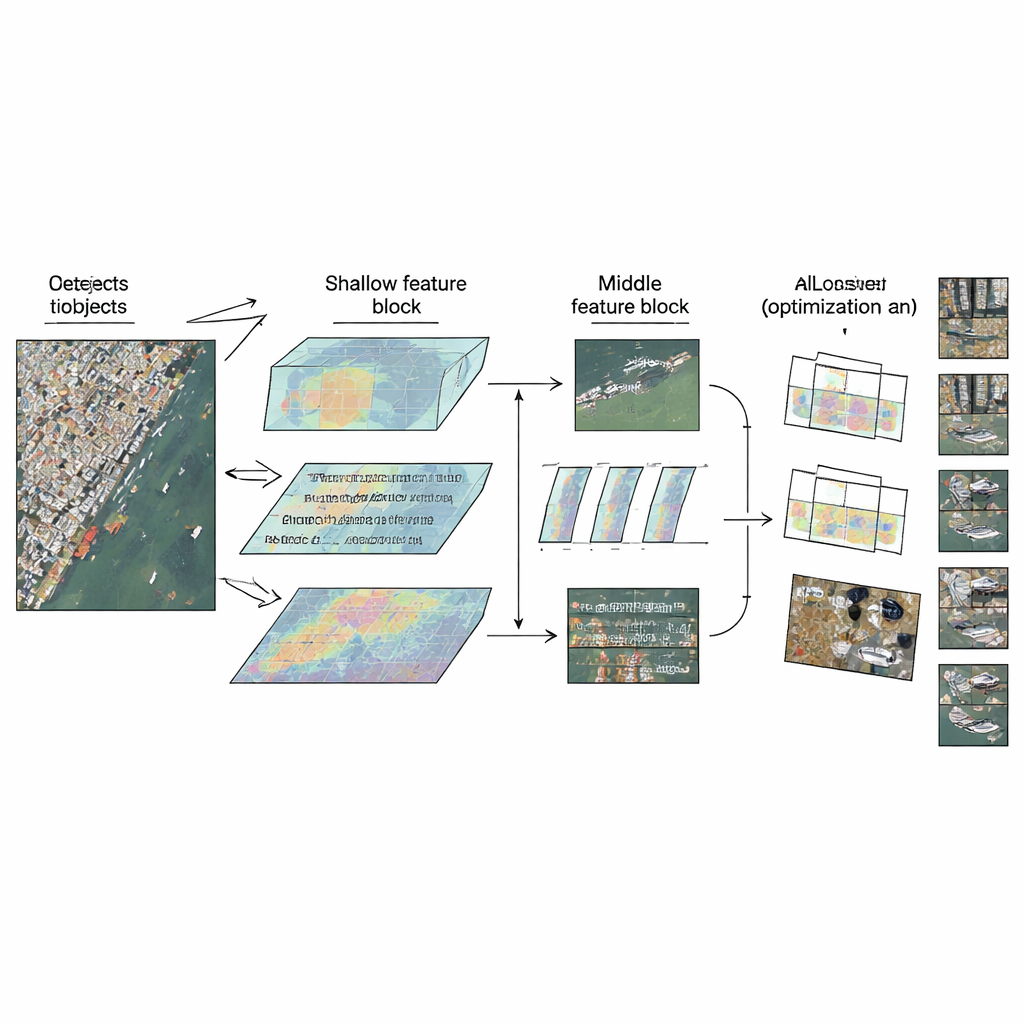
LMW-YOLO modern bir hafif YOLO omurgasından başlar ve yaygın bir tasarım alışkanlığına karşı çıkar: tüm katmanları aynı şekilde ele almak. Her yerde tek tip bir yapı bloğu kullanmak yerine yazarlar, ağın her bölümüne özel bir rol veren “Bağlam-Ölçek Ayrıştırılmış” (Context-Scale Decoupled) stratejisini önerir. Görüntülerin hâlâ nispeten büyük olduğu sığ aşamada, model küçük nesneleri bağlam içinde yorumlayacak kadar uzağa bakmakta zorlanır. Burada yazarlar, birkaç küçük, verimli konvolüsyonu birleştirerek büyük filtre pencerelerini taklit eden Büyük Çekirdekli Bağlam Biriktirme (Large-Kernel Context Aggregation, LKCA) modülünü ekler. Bu, ağın geniş bir alana bakmasını sağlarken küçük arabalar veya tekneler için önemli olan ince ayrıntıları korumasına izin verir. Orta aşamada ise zorluk değişir: model çok farklı boyutlardaki nesnelerle başa çıkmalı ve mekânsal keskinliği kaybetmemelidir.
Aynı Anda Birden Çok Ölçeğe Bakmak
Bu çeşitlilikle başa çıkmak için yazarlar daha derin özellik haritalarında Çok Ölçekli Seyrek Algı (Multi-Scale Dilated Perception, MSDP) modülünü tanıtır. Bu modül bilgiyi iki yola ayırır. Bir yol değişmeden geçirilerek net konumsal ayrıntıları korur. Diğer yol ise farklı aralıklarda “gören”, dilate (boşluklu) filtrelerle farklı boşluklara sahip paralel konvolüsyon dallarından geçer. Bu akışları yeniden birleştirerek ağ zengin bir çok ölçekli görüş kazanır: sıkışık küçük araçları, daha büyük gemileri ve köprüler gibi geniş yapıları ayırt edebilir; tüm bunları yaparken parametre ve hesaplama maliyetini çok düşük tutar. LKCA ve MSDP birlikte, her katmanda en önemli olan yerel ayrıntı ve daha geniş bağlam arasında dengeli bir dikkat sağlar.
Hatalı Veriden Daha Akıllıca Öğrenme
Daha iyi özelliklere rağmen gerçek hava görüntüleriyle eğitim zor olabilir. Uzaktan algılama veri setleri genellikle gürültülü etiketler, kısmen gizlenmiş nesneler veya geleneksel eğitim kayıplarını şaşırtan tuhaf şekiller içerir. Birçok YOLO tarzı model, tüm eğitim örneklerini benzer şekilde ele alan sabit kurallar kullanır; bu da birkaç kötü örneğin yanıltıcı güncellemeler üretmesine ve öğrenmeyi yavaşlatmasına veya kararsızlaştırmasına yol açabilir. LMW-YOLO bunu Wise-IoU v3 adlı bir şema ile değiştirir; bu şema her örneğin eğitime ne kadar etki edeceğini, o anki uyumuna göre ayarlar. Zaten çok iyi veya açıkça kötü olan örneklerin ağırlığı azaltılırken, “zor ama faydalı” durumlar vurgulanır. Bu dinamik odaklanma modelin daha hızlı yakınsamasına ve küçük, kalabalık nesnelerin etrafında daha hassas kutular çizme becerisinin artmasına yardımcı olur.
Bunu Gerçek Dünyada Kanıtlamak
Ekip LMW-YOLO’yu üç zorlu benchmark üzerinde test eder: yüksek çözünürlüklü bir uydu veri seti (NWPU VHR-10), son derece küçük hedeflerden oluşan özel bir koleksiyon (RS-STOD) ve yoğun kalabalık ve örtünme içeren büyük bir drone görüntü seti (VisDrone2019). Üçünün tümünde yeni model, daha büyük ve daha karmaşık sistemler de dahil olmak üzere çeşitli son dönemin dedektörlerini geride bırakır; buna karşın yalnızca yaklaşık 2.6 milyon parametre ve makul hesaplama gerektirir. Ayrıca standart CPU’larda gerçek zamanlı veya gerçek zamana yakın çalışır; bu da güçlü veri merkezlerinin ötesinde, drone ve küçük platformlarda konuşlandırılabilir olduğunu gösterir.
İleriye Dönük Ne Anlama Geliyor
Okuyucular için ana mesaj şudur: yukarıdan küçük nesneleri tespit etme konusunda doğruluk ile verimlilik arasında artık bu kadar keskin bir seçim yapmak zorunda değiliz. Bir ağın farklı katmanlarının ayrıntı ve bağlamı nasıl ele alacağını dikkatle uyarlayarak ve yanıltıcı örnekleri görmezden gelmeyi öğrenen bir kayıp fonksiyonu ile eğiterek, LMW-YOLO daha keskin, daha güvenilir tespitler sunar ve gerçek dünya hava ve uydu cihazları için yeterince küçük kalır. Bu, trafik izleme ve liman güvenliğinden afet müdahalesi ve çevresel incelemelere kadar, devasa bir görüntüdeki her küçük nesnenin önemli bilgi taşıyabildiği uygulamalar için umut verici bir yapı taşı yapar.
Atıf: Qiu, Y., Lin, Z. Lightweight model LMW-YOLO for small object detection in remote sensing images. Sci Rep 16, 11644 (2026). https://doi.org/10.1038/s41598-026-45055-6
Anahtar kelimeler: uzaktan algılama, küçük nesne tespiti, hafif derin öğrenme, hava fotoğrafları, YOLO mimarisi