Clear Sky Science · tr
Hibrit İHA’larda tahmine dayalı enerji yönetimi için GRNN–DP–MPC Eş-optimizasyonu
Neden daha akıllı drone pilleri önemli
Küçük insansız hava araçları, enerji hatlarını denetlemek, paket teslim etmek ve ormanları gözlemlemek gibi işler için gündelik çalışma araçları haline geliyor. Yine de bir sınır duruyor: uçuş süresi. Havada geçen her ekstra dakika daha fazla alanın taranması veya daha güvenli bir dönüş anlamına gelebilir. Bu çalışma, lityum piller taşıyan güneş enerjili drone’ları ele alıyor ve basit görünen ancak karmaşık bir cevabı olan bir soruyu soruyor: uçağın bataryalarını aşırı yormadan daha uzun süre havada kalması için güneş enerjisi ile depolanmış enerjiyi nasıl dengeleyebiliriz?
Güneş ışığını depolanmış güçle harmanlamak
Güneş hibrit drone’lar kanatlarına yayılmış ince, hafif güneş hücreleriyle güneş ışığını alırken; lityum piller gölge, dik tırmanışlar veya bulutlu havalarda güç boşluklarını kapatır. Yazarlar önce bu tür bir uçakta enerjinin nasıl aktığını detaylı biçimde modelliyor. Panellerin güneş açısı ve uçuş duruşuna bağlı olarak ışığı elektriğe nasıl çevirdiğini, pilin fazla zorlanmadan nasıl şarj ve deşarj olduğunu ve motorlar, aviyonik sistemler ile faydalı yüklerin farklı uçuş fazlarında nasıl güç çektiğini tanımlıyorlar. Bu kapalı döngü model, her watt’ın nereden geldiğini ve nereye gittiğini kesin olarak izlemeyi sağlıyor ve daha akıllı bir kontrol stratejisinin dayanağını oluşturuyor.
Drone’u ileriye bakmayı öğretmek
Mevcut enerji stratejilerinin temel sorunu, gelecek yerine şu an olanlara tepki vermeleri. Bu, drone’un görevin başında pili oburca tüketmesine ve ileride zorlanmasına yol açabilir. Bunu önlemek için yazarlar, genel regresyon sinir ağı (generalized regression neural network) adlı bir yapay sinir ağı türünü kullanarak uçağın yakın gelecekteki güç ihtiyaçlarını son elektriksel geçmişinden tahmin ediyor. Fiziksel her detayı zahmetle kodlamak yerine, bu ağ kalkış sırasında tipik güç sıçramaları veya seyir sırasında sabit çekim gibi gerçek uçuş verilerinden kalıpları öğreniyor. On binlerce veri noktasıyla yapılan testlerde bu tahminci, pil voltajını yalnızca birkaç yüzde hata ile tahmin ederek kontrolöre doğru kısa vadeli öngörüler sunuyor.
Pilin en iyi kullanımını planlamak
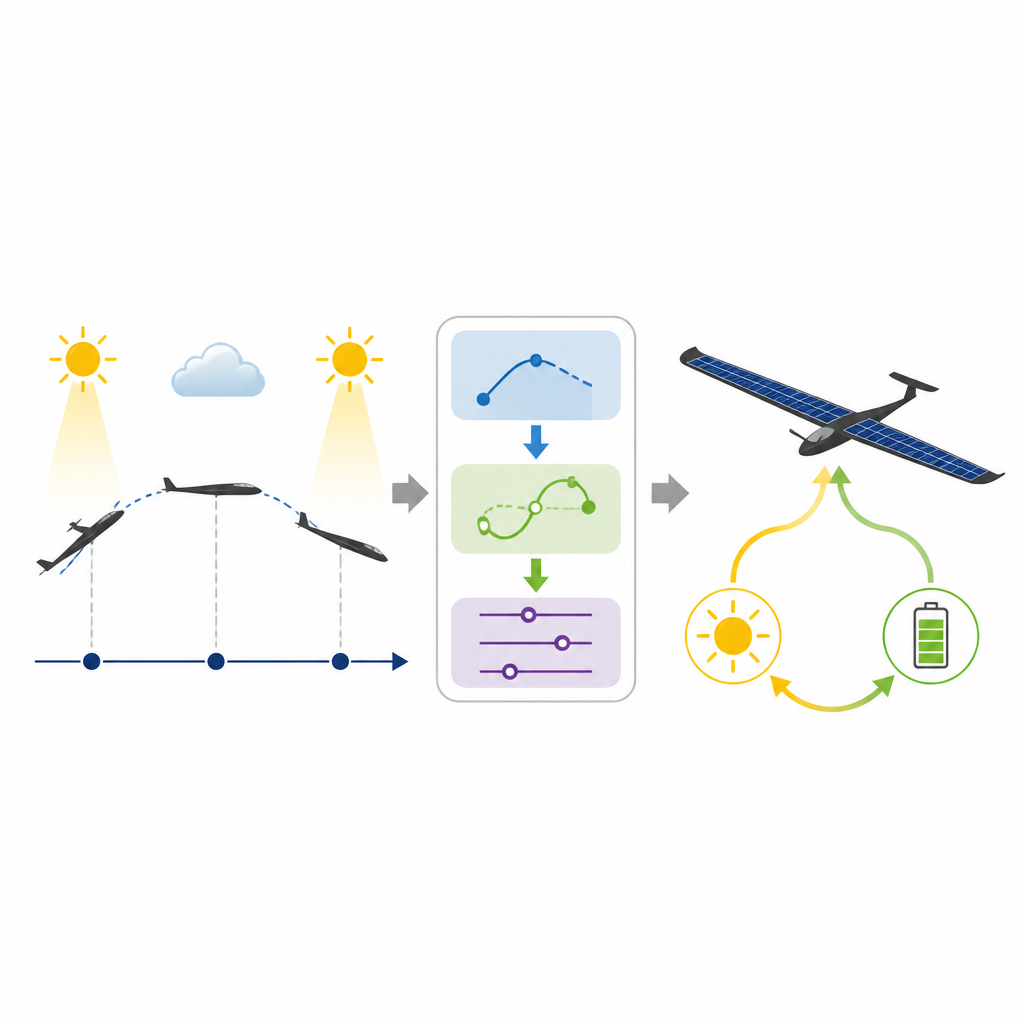
İleriye bakmak hikâyenin sadece yarısı; drone’un güneş ile pil arasındaki işi nasıl paylaşacağına da karar vermesi gerekiyor. Bunun için araştırmacılar, birçok olası seçimi tarayan ve uçuş penceresi boyunca pil kullanımını en aza indirirken uçağın güvenliğini de koruyanları seçen bir planlama yöntemi benimsiyor. Bu planlayıcı güneş enerjisi mevcut olduğunda onu kullanmayı tercih ediyor, pilin ne kadar zorleneceğini yumuşakça sınırlıyor ve iniş için yeterli rezerv kalması amacıyla pil şarjını sağlıklı aralıkta tutuyor. Böyle geniş kapsamlı arama yavaş olabileceğinden, yöntemi bir yuvarlanan kontrol (rolling control) düzenine sarıyorlar: daha kısa, daha kolay bir planlama problemi tekrar tekrar çözülüyor, yalnızca ilk karar uygulanıyor ve yeni ölçümler ile tahminler geldikçe plan güncelleniyor.
Pili gerçek zamanda doğru tutmak
Uzun uçuşlarda, akım veya voltaj ölçümlerindeki küçük hatalar tahmin edilen pil şarjının gerçek durumdan sapmasına neden olabilir; bu, beklenmedik şekilde boşalan bir pil için risklidir. Bu yüzden yazarlar sistemlerine birkaç güvenlik kontrolü katıyor. Sinir ağının voltaj tahmini sürekli olarak sensör okumalarıyla karşılaştırılıyor; fark küçük bir eşik aştığında tahmin edilen şarj düzeltiliyor. Ek kontroller hesaplanan ile ölçülen pil gücünü karşılaştırıyor ve her planlama penceresinin sonuna doğru pili nazikçe hedef seviyeye geri yönlendiriyor. Bu katmanlı emniyet önlemleri, kontrolörün pil ile ilgili algısını gerçek duruma yakın tutuyor.
Gelecek drone görevleri için anlamı
Hibrit sabit kanat–çokrotorlu bir drone üzerinde yapılan simülasyonlar ve uçuş deneylerinde yeni strateji, tırmanış ve alçalma sırasında pil güç talebini azalttı ve şarj durumunu hem kural tabanlı yönteme hem de yakın tarihli bir öğrenme tabanlı yaklaşıma kıyasla daha stabil tuttu. Pratik anlamda bu, pilin daha tutumlu kullanıldığı, güneş enerjisinin işin daha fazlasını yaptığı ve uçağın sınırlı ağırlığını aşırı büyük pillere ayırmak yerine daha fazla faydalı yüke ayırabileceği anlamına geliyor. Okuyucu için çıkarım şu: hızlı tahmin, düşünceli planlama ve sürekli düzeltmeyi birleştirmek, güneş hibritli drone’ların uçuş süresini uzatmasını ve daha güvenilir çalışmasını sağlıyor; bu da alçak irtifada rutin uzun dayanıklılık görevlerine doğru bir adım.
Atıf: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Anahtar kelimeler: güneş hibrit İHA, enerji yönetimi, model öngörülü kontrol, sinir ağı tahmini, lityum pil SOC