Clear Sky Science · it
Co-ottimizzazione GRNN–DP–MPC per la gestione predittiva dell’energia in UAV ibridi
Perché batterie più intelligenti per i droni sono importanti
I piccoli velivoli senza pilota stanno diventando strumenti di lavoro per compiti come ispezionare linee elettriche, consegnare pacchi e sorvegliare le foreste. Rimane però un limite ostinato: il tempo di volo. Ogni minuto extra in aria può significare più area ispezionata o un rientro a casa più sicuro. Questo studio esamina droni alimentati a energia solare che portano anche batterie al litio e pone una domanda semplice ma dalla risposta complessa: come bilanciare energia solare e energia immagazzinata affinché il velivolo resti sospeso più a lungo senza affaticare le batterie?
Mischiare la luce del sole con l’energia immagazzinata
I droni ibridi solari catturano la luce tramite celle solari sottili e leggere distribuite sulle ali, mentre le batterie al litio colmano i vuoti di potenza durante l’ombra, le salite ripide o il maltempo. Gli autori costruiscono innanzitutto un quadro dettagliato di come l’energia si muove all’interno di un simile velivolo. Descrivono come i pannelli trasformano la luce in elettricità in funzione dell’angolo del sole e della postura di volo, come la batteria si carica e scarica senza essere stressata e come motori, avionica e payload assorbono energia nelle diverse fasi di volo. Questo modello a ciclo chiuso permette di tracciare esattamente da dove viene ogni watt e dove va, formando la spina dorsale di qualunque strategia di controllo più sofisticata.
Insegnare al drone a guardare avanti
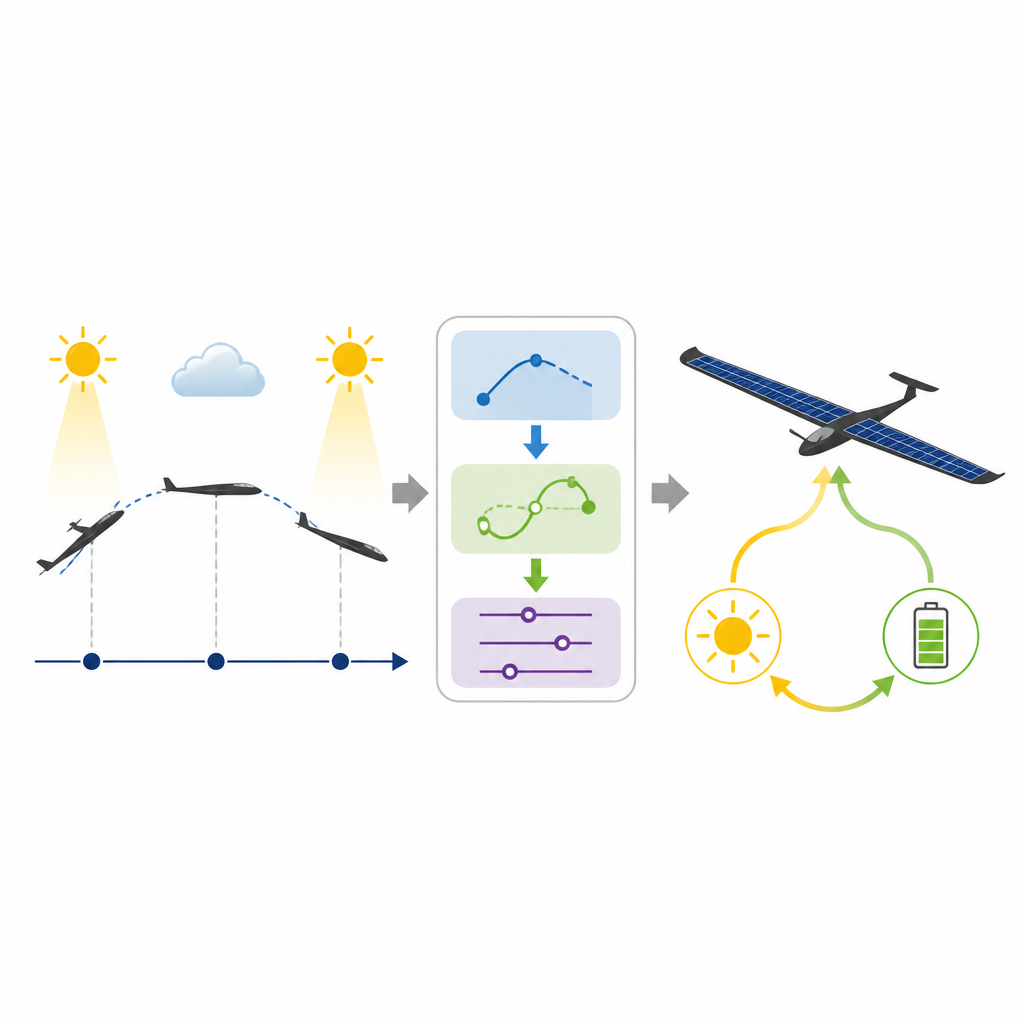
Un problema chiave delle strategie energetiche attuali è che reagiscono a ciò che accade ora piuttosto che a ciò che accadrà dopo. Questo può portare un drone a scaricare avidamente la batteria all’inizio di una missione e a trovarsi in difficoltà più tardi. Per evitarlo, gli autori usano un tipo di rete neurale artificiale, chiamata generalized regression neural network (GRNN), per prevedere il fabbisogno di potenza nel prossimo futuro a partire dalla storia elettrica recente dell’aeromobile. Invece di codificare meticolosamente ogni dettaglio fisico, questa rete impara pattern dai dati di volo reali, come i picchi tipici durante il decollo o il consumo costante in crociera. Nei test su decine di migliaia di punti dati, questo predittore stima la tensione della batteria con errori di solo pochi percentuali, fornendo al controllore una previsione a breve termine accurata.
Pianificare il miglior utilizzo della batteria
Guardare avanti è solo metà della storia; il drone ha anche bisogno di un modo per decidere come dividere il lavoro tra sole e batteria. Per questo, i ricercatori adottano un metodo di pianificazione che esplora molte possibili scelte e seleziona quelle che minimizzano l’uso della batteria su una finestra futura mantenendo il velivolo al sicuro. Questo pianificatore privilegia l’uso dell’energia solare quando disponibile, limita dolcemente lo stress prestazionale della batteria e mantiene la carica in un intervallo sano in modo da avere riserva sufficiente per l’atterraggio. Poiché una ricerca globale di questo tipo può essere lenta, la incapsulano in uno schema di controllo a rolling horizon che risolve ripetutamente un problema di pianificazione più corto e semplice, applica solo la prima decisione e poi aggiorna il piano man mano che arrivano nuove misurazioni e previsioni.
Mantenere la batteria corretta in tempo reale
Su voli lunghi, piccoli errori nella misura di corrente o tensione possono causare una deriva della stima della carica della batteria rispetto alla realtà, cosa rischiosa per un velivolo che non deve mai rimanere inaspettatamente senza energia. Gli autori quindi intrecciano nel sistema diversi controlli di sicurezza. La previsione della tensione della rete neurale viene confrontata continuamente con le letture dei sensori; quando lo scarto supera una soglia ridotta, la stima della carica viene corretta. Controlli aggiuntivi confrontano la potenza batteria calcolata e quella misurata e guidano dolcemente la batteria verso un livello target verso la fine di ogni finestra di pianificazione. Queste salvaguardie stratificate mantengono l’immagine che il controllore ha della batteria strettamente allineata con il suo stato reale.
Cosa significa per le missioni future dei droni
Testata in simulazioni e esperimenti di volo su un drone ibrido ala fissa–multirotore, la nuova strategia ha ridotto la domanda di potenza della batteria durante salita e discesa e ha mantenuto lo stato di carica più stabile rispetto sia a un metodo basato su regole sia a un approccio recente basato sull’apprendimento. In termini pratici, questo significa che la batteria viene usata più parsimoniosamente, l’energia solare svolge gran parte del lavoro e il velivolo può destinare più del suo limitato peso al carico utile invece che a batterie sovradimensionate. Per il lettore, la conclusione è che combinare previsione rapida, pianificazione accurata e correzione costante permette ai droni ibridi solari di allungare il tempo di volo e operare con maggiore affidabilità, un passo verso missioni di lunga durata e bassa quota di routine.
Citazione: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Parole chiave: UAV ibrido solare, gestione dell’energia, controllo predittivo di modello, predizione con rete neurale, SOC batteria al litio