Clear Sky Science · fr
Co-optimisation GRNN–DP–MPC pour la gestion prédictive de l’énergie dans les UAV hybrides
Pourquoi des batteries de drone plus intelligentes comptent
Les petits aéronefs sans pilote deviennent des outils de travail pour des tâches comme l’inspection de lignes électriques, la livraison de colis et la surveillance des forêts. Pourtant une limitation persistante demeure : l’autonomie de vol. Chaque minute supplémentaire dans les airs peut signifier une zone davantage couverte ou un retour au sol plus sûr. Cette étude s’intéresse aux drones solaires qui embarquent aussi des batteries lithium et pose une question simple au contenu complexe : comment jongler entre l’énergie solaire et l’énergie stockée pour que l’aéronef reste en vol plus longtemps sans surmener ses batteries ?
Mêler lumière du soleil et énergie stockée
Les drones hybrides solaires captent la lumière à travers des cellules photovoltaïques minces et légères réparties sur leurs ailes, tandis que les batteries lithium couvrent les besoins en énergie lors d’ombres, de montées raides ou de temps nuageux. Les auteurs construisent d’abord une représentation détaillée des flux d’énergie dans un tel aéronef. Ils décrivent comment les panneaux convertissent la lumière selon l’angle du soleil et l’assiette de vol, comment la batterie se charge et se décharge sans être surmenée, et comment moteurs, avionique et charge utile consomment selon les phases de vol. Ce modèle en boucle fermée leur permet de suivre précisément d’où vient chaque watt et où il se dirige, formant l’épine dorsale de toute stratégie de contrôle plus intelligente.
Apprendre au drone à anticiper
Un problème clé des stratégies énergétiques actuelles est qu’elles réagissent à ce qui se passe maintenant plutôt qu’à ce qui arrivera ensuite. Cela peut pousser un drone à vider sa batterie trop tôt dans la mission et à peiner plus tard. Pour l’éviter, les auteurs utilisent un type de réseau de neurones artificiels, appelé réseau de régression généralisée (GRNN), pour prédire les besoins en puissance proches de l’aéronef à partir de son historique électrique récent. Plutôt que de coder en détail chaque phénomène physique, ce réseau apprend des motifs à partir de données de vol réelles, comme les pics typiques au décollage ou la consommation stable en croisière. Dans des tests basés sur des dizaines de milliers de points de données, ce prédicteur estime la tension de la batterie avec des erreurs de seulement quelques pourcents, fournissant au contrôleur une prévision à court terme précise.
Planifier la meilleure utilisation de la batterie
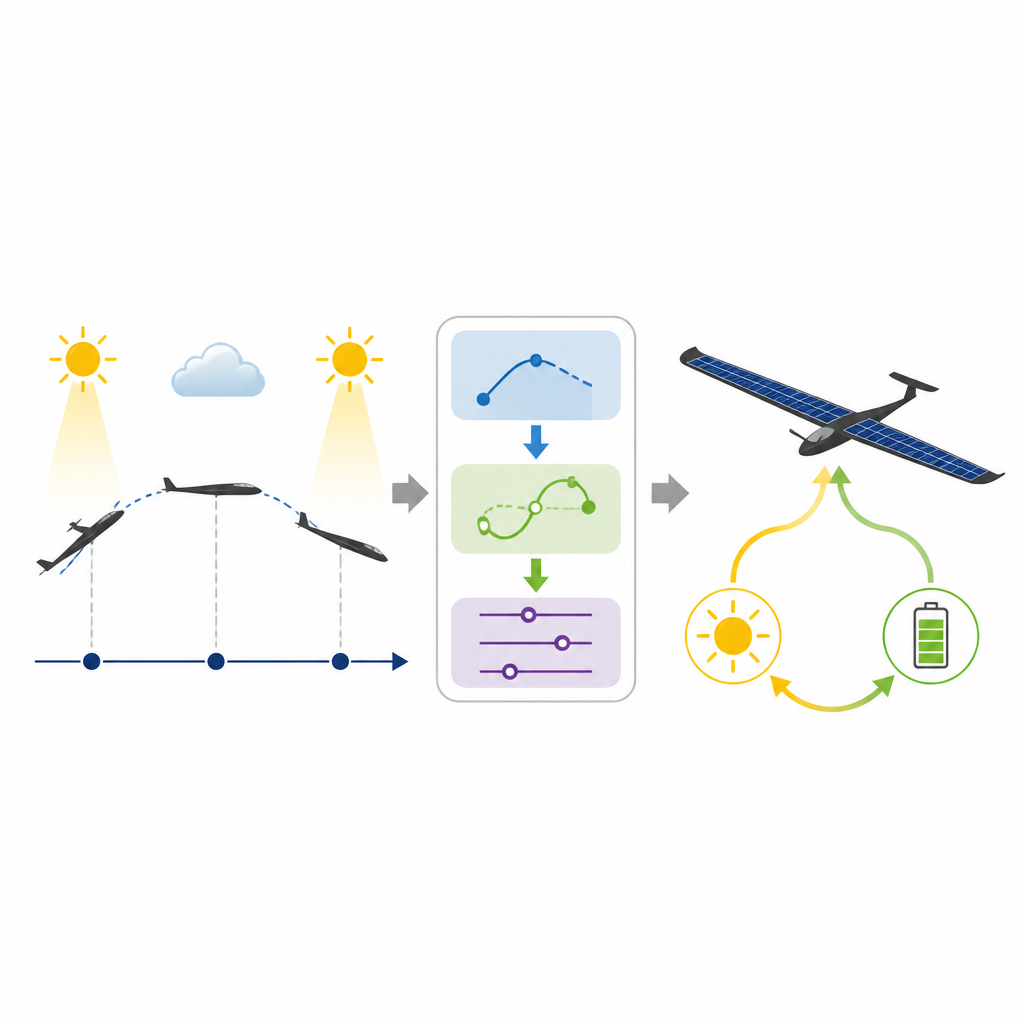
Anticiper n’est que la moitié de l’histoire ; le drone a aussi besoin d’un moyen pour décider comment répartir le travail entre le solaire et la batterie. Pour cela, les chercheurs adoptent une méthode de planification qui explore de nombreuses options possibles et choisit celles qui minimisent l’utilisation de la batterie sur une fenêtre future tout en garantissant la sécurité de l’aéronef. Ce planificateur favorise l’usage de l’énergie solaire dès qu’elle est disponible, limite en douceur l’effort demandé à la batterie et maintient l’état de charge dans une plage saine afin qu’il reste suffisamment de réserve pour l’atterrissage. Parce qu’une recherche globale de ce type peut être lente, ils l’intègrent dans un schéma de contrôle en glissement qui résout de façon répétée un problème de planification plus court et plus simple, n’applique que la première décision, puis met à jour le plan à mesure que de nouvelles mesures et prédictions arrivent.
Maintenir la batterie juste en temps réel
Sur de longs vols, de petites erreurs dans la mesure du courant ou de la tension peuvent faire dériver l’estimation de l’état de charge de la batterie par rapport à la réalité, ce qui est risqué pour un aéronef qui ne doit jamais s’épuiser inopinément. Les auteurs tissent donc plusieurs vérifications de sécurité dans leur système. La prédiction de tension du réseau est continuellement comparée aux lectures capteur ; quand l’écart dépasse un petit seuil, l’estimation de charge est corrigée. Des vérifications supplémentaires comparent la puissance calculée et la puissance mesurée de la batterie et réorientent en douceur la batterie vers un niveau cible vers la fin de chaque fenêtre de planification. Ces sécurités superposées maintiennent l’image du contrôleur sur la batterie étroitement alignée avec son état réel.
Ce que cela signifie pour les futures missions de drones
Testée en simulations et en vols expérimentaux sur un drone hybride aile fixe–multirotor, la nouvelle stratégie a réduit la demande en puissance de la batterie durant montées et descentes et a maintenu l’état de charge plus stable que tant une méthode basée sur des règles qu’une approche récente basée sur l’apprentissage. En termes pratiques, cela signifie que la batterie est utilisée de façon plus parcimonieuse, que l’énergie solaire réalise une plus grande part du travail, et que l’aéronef peut consacrer davantage de sa masse limitée à une charge utile utile plutôt qu’à des batteries surdimensionnées. Pour le lecteur, la leçon est que la combinaison d’une prédiction rapide, d’une planification réfléchie et d’une correction constante permet aux drones hybrides solaires d’allonger leur temps de vol et d’opérer plus fiablement, une étape vers des missions d’endurance longue et routinières à basse altitude.
Citation: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Mots-clés: UAV hybride solaire, gestion de l’énergie, commande prédictive, prédiction par réseau de neurones, état de charge batterie lithium