Clear Sky Science · nl
GRNN–DP–MPC Co-optimalisatie voor voorspellend energiemanagement in hybride UAV's
Waarom slimere dronbatterijen ertoe doen
Kleine onbemande vliegtuigen worden steeds vaker ingezet voor taken zoals het inspecteren van hoogspanningslijnen, het bezorgen van pakketten en het bewaken van bossen. Eén hardnekkige beperking blijft echter: de vliegtijd. Elke extra minuut in de lucht betekent vaak een groter onderzoeksgebied of een veiliger terugkeer. Deze studie bekijkt zon-aangedreven drones met daarnaast lithiumbatterijen en stelt een eenvoudige vraag met een complex antwoord: hoe kunnen we zonnekracht en opgeslagen energie zo combineren dat het vliegtuig langer blijft vliegen zonder de batterijen te overbelasten?
De zon combineren met opgeslagen energie
Zonne-hybride drones zetten zonlicht om via dunne, lichte zonnecellen over hun vleugels, terwijl lithiumbatterijen het gat vullen bij schaduw, steile klimvluchten of wolkachtig weer. De auteurs bouwen eerst een gedetailleerd beeld van hoe energie door zo’n vliegtuig stroomt. Ze beschrijven hoe de panelen zonlicht in elektriciteit omzetten afhankelijk van zonshoek en vluchtgeometrie, hoe de batterij laadt en ontlaadt zonder te zwaar belast te worden, en hoe motoren, avionica en payload tijdens verschillende vluchtfasen stroom verbruiken. Dit gesloten-lusmodel laat precies volgen waar elke watt vandaan komt en naartoe gaat, en vormt de ruggengraat voor een slimmer regelsysteem.
De drone leren vooruit te kijken
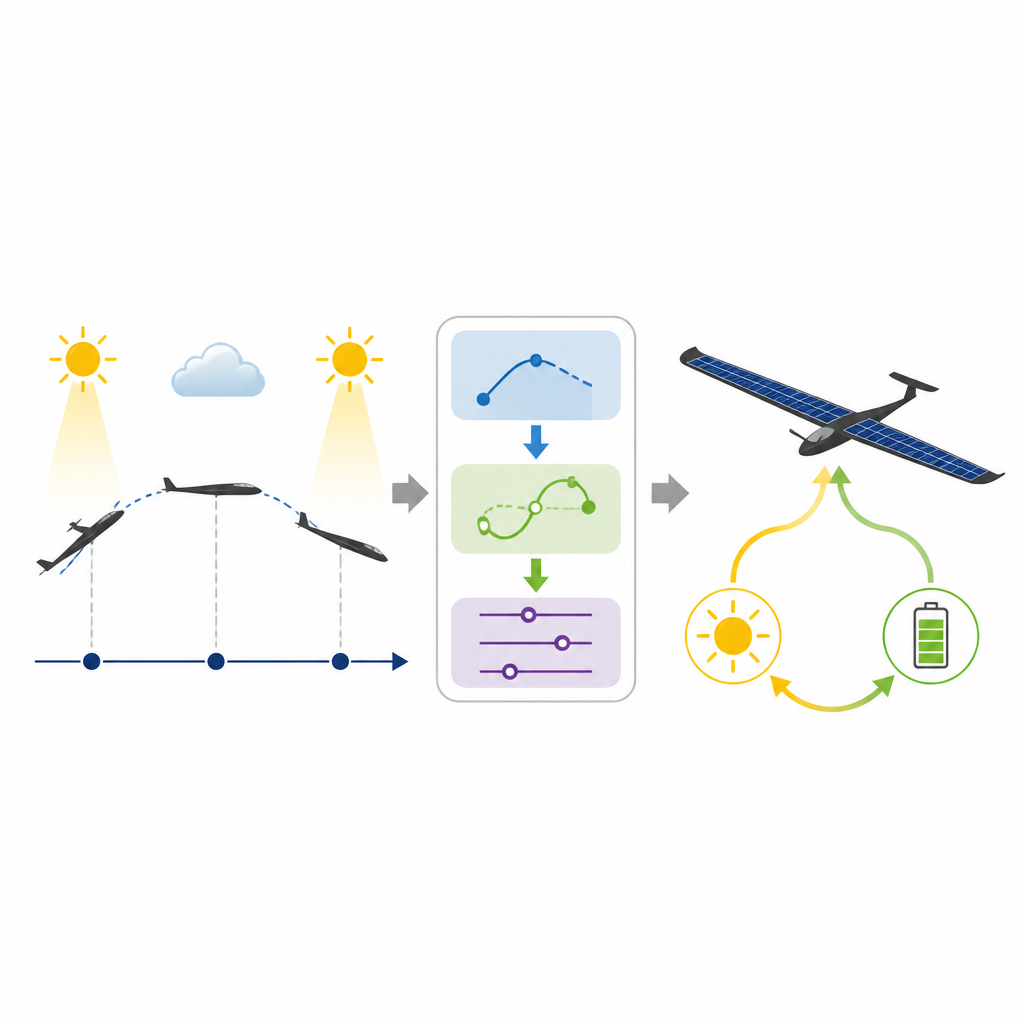
Een belangrijk probleem van huidige energiepolitiek is dat die reageert op wat nu gebeurt in plaats van op wat straks komt. Daardoor kan een drone in het begin van een missie zijn batterij gulzig leegtrekken en later in de problemen komen. Om dat te voorkomen gebruiken de auteurs een type kunstmatig neuraal netwerk, een generalized regression neural network (GRNN), om de korte-termijn energiebehoefte van het vliegtuig te voorspellen uit de recente elektrische geschiedenis. In plaats van elk fysisch detail painstaking te modelleren, leert dit netwerk patronen uit echte vluchtgegevens, zoals typische energiepieken bij opstijgen of het constante verbruik tijdens kruisen. In tests met tienduizenden datapunten schat deze voorspeller de batterijspanning met fouten van slechts een paar procent, waardoor de regelaar een nauwkeurige korte-termijnvoorspelling krijgt.
Het beste gebruik van de batterij plannen
Vooruitkijken is slechts de helft; de drone moet ook beslissen hoe het werk tussen zon en batterij wordt verdeeld. Hiervoor gebruiken de onderzoekers een planningsmethode die veel mogelijke keuzes doorzoekt en die selecteert die het batterijgebruik over een toekomstvenster minimaliseert terwijl het vliegtuig veilig blijft. Deze planner geeft de voorkeur aan zonnekracht wanneer beschikbaar, beperkt op een zachte manier hoe hard de batterij wordt belast, en houdt de batterijlading binnen een gezonde marge zodat er voldoende reserve is voor de landing. Omdat zo’n globale zoekactie traag kan zijn, plaatsen ze hem binnen een rollend regelingsschema dat herhaaldelijk een korter, eenvoudiger planningsprobleem oplost, slechts de eerste beslissing toepast en vervolgens het plan bijwerkt zodra nieuwe metingen en voorspellingen binnenkomen.
De batterij in real time betrouwbaar houden
Over lange vluchten kunnen kleine fouten in het meten van stroom of spanning ertoe leiden dat de geschatte batterijlading afdrijft van de werkelijkheid, wat riskant is voor een vliegtuig dat nooit onverwacht leeg mag raken. De auteurs vlechten daarom meerdere veiligheidscontroles in hun systeem. De spanningsvoorspelling van het neurale netwerk wordt continu vergeleken met sensormetingen; wanneer de afwijking een kleine drempel overschrijdt, wordt de geschatte lading gecorrigeerd. Extra controles vergelijken berekende en gemeten batterijvermogen en sturen de batterij geleidelijk terug naar een streefwaarde tegen het einde van elk planningsvenster. Deze gelaagde waarborgen houden het beeld van de batterij van de regelaar goed afgestemd op de werkelijke toestand.
Wat dit betekent voor toekomstige dronemissies
Getest in simulaties en vluchtproeven op een hybride vastvleugel–multirotor drone, verminderde de nieuwe strategie het batterijvermogen tijdens klimmen en dalen en hield de laadstaat stabieler dan zowel een op regels gebaseerde methode als een recente op leren gebaseerde aanpak. Praktisch betekent dit dat de batterij zuiniger wordt gebruikt, zonne-energie meer werk doet en het vliegtuig meer van zijn beperkte gewicht kan besteden aan nuttige payload in plaats van te grote batterijen. Voor lezers is de conclusie dat het combineren van snelle voorspelling, doordachte planning en constante correctie zonne-hybride drones helpt hun vliegtijd te rekken en betrouwbaarder te laten opereren, een stap richting routineuze langeduurmissies op lage hoogte.
Bronvermelding: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Trefwoorden: zonne-hybride UAV, energiemanagement, modelvoorspellende regeling, neurale netwerkvoorspelling, lithiumbatterij SOC