Clear Sky Science · es
Cooptimización GRNN–DP–MPC para la gestión predictiva de energía en UAV híbridos
Por qué importan baterías más inteligentes en los drones
Las pequeñas aeronaves no tripuladas se están convirtiendo en herramientas para tareas como inspeccionar líneas eléctricas, entregar paquetes y vigilar bosques. Sin embargo, permanece un límite persistente: el tiempo de vuelo. Cada minuto extra en el aire puede significar mayor área inspeccionada o un regreso a casa más seguro. Este estudio analiza drones impulsados por energía solar que también llevan baterías de litio y plantea una pregunta simple con respuesta compleja: ¿cómo gestionar la energía solar y la almacenada para que la aeronave se mantenga en vuelo más tiempo sin sobrecargar las baterías?
Mezclando luz solar y energía almacenada
Los drones híbridos solares captan la luz mediante células solares delgadas y ligeras repartidas por sus alas, mientras que las baterías de litio cubren las brechas de potencia durante sombra, ascensos pronunciados o tiempo nublado. Los autores primero construyen un retrato detallado de cómo fluye la energía en dicha aeronave. Describen cómo los paneles convierten la luz en electricidad según el ángulo solar y la postura de vuelo, cómo la batería carga y descarga sin sobreexigirse, y cómo motores, aviónica y carga útil consumen energía en diferentes fases del vuelo. Este modelo de lazo cerrado les permite rastrear exactamente de dónde viene cada vatio y hacia dónde va, formando la base de cualquier estrategia de control más inteligente.
Enseñando al dron a mirar adelante
Un problema clave con las estrategias energéticas actuales es que reaccionan a lo que ocurre ahora en lugar de a lo que ocurrirá después. Eso puede hacer que un dron agote su batería tempranamente y sufra más adelante en la misión. Para evitarlo, los autores usan un tipo de red neuronal artificial, llamada red neuronal de regresión generalizada (GRNN), para predecir las necesidades de potencia a corto plazo de la aeronave a partir de su historial eléctrico reciente. En lugar de codificar meticulosamente cada detalle físico, esta red aprende patrones a partir de datos reales de vuelo, como los picos típicos de potencia en el despegue o el consumo constante en crucero. En pruebas con decenas de miles de puntos de datos, este predictor estima la tensión de la batería con errores de solo unos pocos porcentajes, proporcionando al controlador un pronóstico a corto plazo preciso.
Planificando el mejor uso de la batería
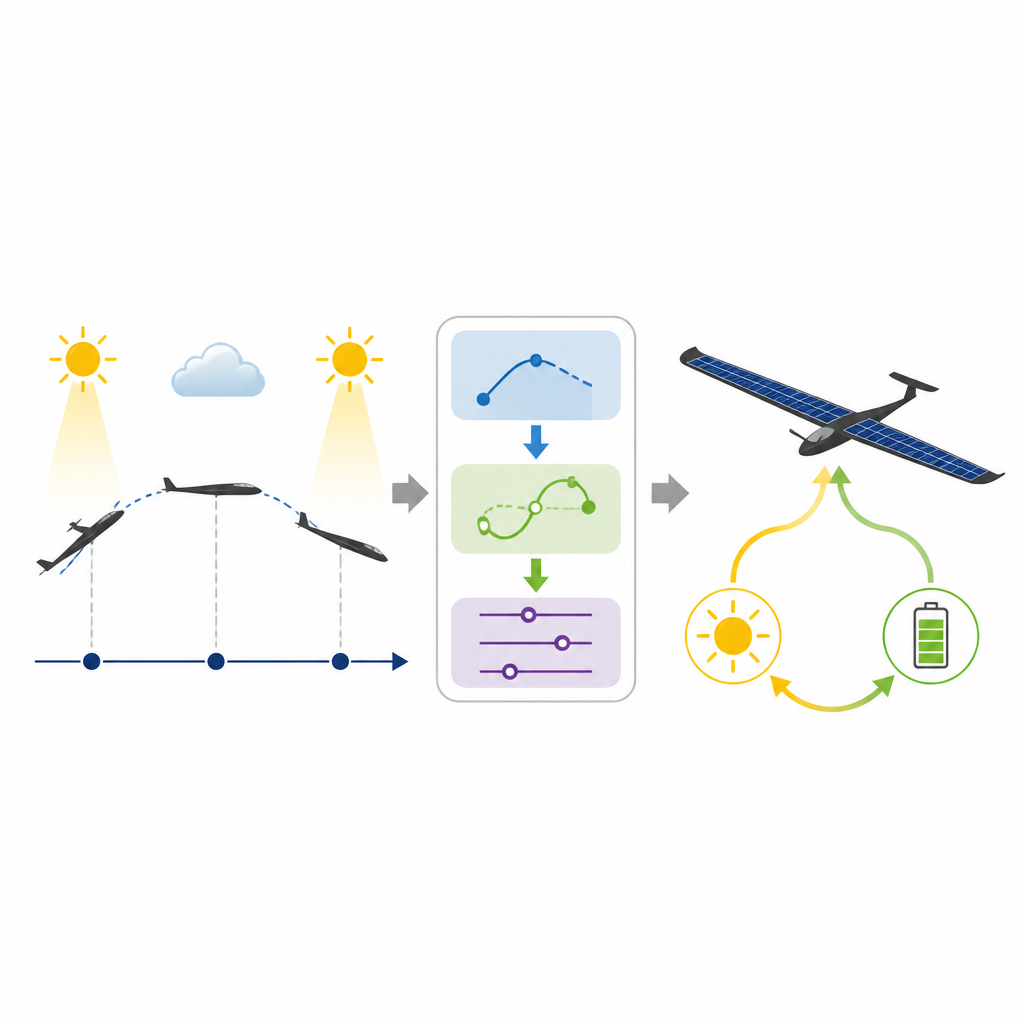
Mirar hacia adelante es solo la mitad de la historia; el dron también necesita un modo de decidir cómo repartir la carga entre el sol y la batería. Para ello, los investigadores adoptan un método de planificación que explora muchas posibles opciones y selecciona aquellas que minimizan el uso de la batería en una ventana futura mientras mantienen la aeronave segura. Este planificador favorece el uso de energía solar siempre que esté disponible, limita suavemente el esfuerzo exigido a la batería y mantiene la carga de la batería dentro de un rango saludable para que haya suficiente reserva al aterrizar. Dado que esa búsqueda global puede ser lenta, la envuelven en un esquema de control rodante que resuelve repetidamente un problema de planificación más corto y manejable, aplica solo la primera decisión y luego actualiza el plan conforme llegan nuevas mediciones y predicciones.
Manteniendo la batería honesta en tiempo real
En vuelos largos, errores pequeños en la medición de corriente o tensión pueden provocar que la estimación de carga de la batería se desplace respecto a la realidad, lo cual es arriesgado para una aeronave que nunca debe quedarse inesperadamente sin energía. Por ello, los autores entretejen varias comprobaciones de seguridad en su sistema. La predicción de tensión de la red neuronal se compara continuamente con las lecturas del sensor; cuando la diferencia supera un umbral pequeño, se corrige la estimación de carga. Comprobaciones adicionales comparan la potencia de batería calculada y medida y orientan suavemente la batería hacia un nivel objetivo hacia el final de cada ventana de planificación. Estas salvaguardas por capas mantienen la imagen de la batería que tiene el controlador estrechamente alineada con su estado real.
Qué significa esto para misiones de drones futuras
Probada en simulaciones y experimentos de vuelo sobre un dron híbrido de ala fija–multirrotor, la nueva estrategia redujo la demanda de potencia de la batería durante ascensos y descensos y mantuvo el estado de carga más estable que tanto un método basado en reglas como un enfoque reciente basado en aprendizaje. En términos prácticos, eso significa que la batería se usa con mayor moderación, la energía solar asume una mayor parte del trabajo y la aeronave puede dedicar más de su limitado peso a la carga útil en lugar de a baterías sobredimensionadas. Para el lector, la conclusión es que combinar predicción rápida, planificación cuidadosa y corrección constante permite a los drones híbridos solares estirar su tiempo de vuelo y operar con más fiabilidad, un paso hacia misiones de gran resistencia de forma rutinaria a baja altitud.
Cita: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Palabras clave: UAV híbrido solar, gestión de energía, control predictivo de modelo, predicción por red neuronal, SOC de batería de litio