Clear Sky Science · sv
GRNN–DP–MPC samoptimering för prediktiv energihantering i hybrida UAV
Varför smartare drönarbatterier spelar roll
Små obemannade flygfarkoster blir arbetshästar för uppgifter som inspektion av kraftledningar, paketleverans och övervakning av skog. Men en seg begränsning kvarstår: flygtiden. Varje extra minut i luften kan innebära större täckt yta eller en säkrare hemresa. Denna studie undersöker soldrivna drönare som också bär litiumbatterier och ställer en till synes enkel men komplex fråga: hur kan vi jonglera solenergi och lagrad energi så att farkosten håller sig i luften längre utan att överbelasta batterierna?
Att blanda solljus och lagrad energi
Solhybrida drönare fångar soljus genom tunna, lätta solceller utbredda över vingarna, medan litiumbatterier täcker effektluckor under skuggor, branta klättringar eller molnigt väder. Författarna bygger först upp en detaljerad bild av hur energi rör sig genom en sådan farkost. De beskriver hur panelerna omvandlar soljus till elektricitet beroende på solvinkel och flygpostur, hur batteriet laddas och urladdas utan att överbelastas, och hur motorer, avionik och nyttolast drar effekt i olika flygfaser. Denna slutenhetsmodell låter dem spåra exakt var varje watt kommer ifrån och vart den går, och bildar ryggraden för en smartare styrstrategi.
Lära drönaren att se framåt
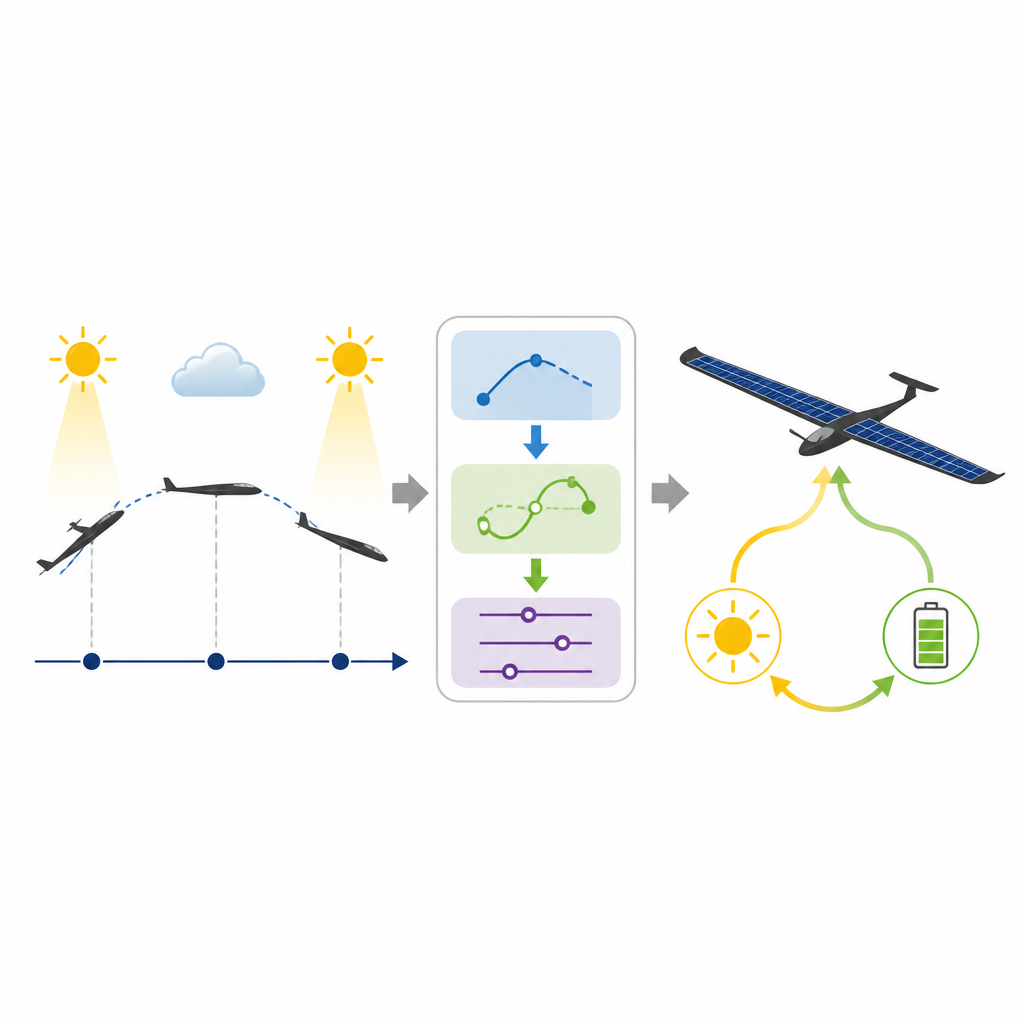
Ett centralt problem med dagens energistrategier är att de reagerar på vad som händer nu snarare än vad som kommer att hända. Det kan få en drönare att kortsiktigt tömma batteriet tidigt i en mission och få problem senare. För att undvika detta använder författarna en typ av artificiellt neuralt nätverk, kallat generaliserat regressionsneuralt nätverk, för att förutsäga farkostens nära framtida effektbehov utifrån dess senaste elektriska historik. Istället för att mödosamt koda varje fysisk detalj lär sig nätverket mönster från verkliga flygdata, såsom typiska effekttoppar vid start eller den jämna dragningen vid kryssning. I tester med tiotusentals datapunkter estimerar denna prediktor batteriets spänning med fel på bara några procent, vilket ger styrsystemet en noggrann korttidsprognos.
Planera bästa användningen av batteriet
Att kunna se framåt är bara halva historien; drönaren behöver också ett sätt att avgöra hur arbetet ska fördelas mellan sol och batteri. För detta antar forskarna en planeringsmetod som söker över många möjliga val och väljer dem som minimerar batterianvändning över ett framtida fönster samtidigt som farkosten hålls säker. Denna planerare föredrar att använda solkraft när den finns tillgänglig, begränsar varsamt hur hårt batteriet belastas och håller batteriladdningen inom ett hälsosamt intervall så att det finns tillräcklig reserv för landning. Eftersom sådan global sökning kan vara långsam kapslar de in den i en rullande styrschema som upprepade gånger löser ett kortare, enklare planeringsproblem, tillämpar endast det första beslutet och sedan uppdaterar planen när nya mätningar och prognoser anländer.
Hålla batteriet ärligt i realtid
Under långa flygningar kan små fel i mätning av ström eller spänning få den uppskattade batteriladdningen att drifta bort från verkligheten, vilket är riskabelt för ett fordon som aldrig får bli oväntat urladdat. Författarna väver därför in flera säkerhetskontroller i sitt system. Det neurala nätverkets spänningsprognos jämförs kontinuerligt med sensormätningar; när skillnaden överstiger en liten tröskel korrigeras den uppskattade laddningen. Ytterligare kontroller jämför beräknad och uppmätt batterieffekt och styr försiktigt batteriet tillbaka mot en målnivå mot slutet av varje planeringsfönster. Dessa lager av skydd håller styrsystemets bild av batteriet nära dess verkliga tillstånd.
Vad detta betyder för framtida drönaruppdrag
När strategin testades i simuleringar och flygexperiment på en hybrid fast ving–multirotor‑drönare minskade den nya metoden batterikraftbehovet under stigning och nedsänkning och höll laddningstillståndet mer stabilt än både en regelbaserad metod och en nyare lärandebaserad ansats. I praktiska termer betyder det att batteriet används sparsammare, solenergi gör mer av jobbet och farkosten kan avdela mer av sin begränsade vikt till användbar nyttolast istället för överdimensionerade batterier. Slutsatsen för läsaren är att kombinationen av snabba prognoser, genomtänkt planering och ständig korrigering låter solhybrida drönare förlänga sin flygtid och arbeta mer tillförlitligt — ett steg mot rutinmässiga långendurance‑uppdrag på låg höjd.
Citering: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Nyckelord: solhybrid-UAV, energihantering, modellprediktiv styrning, neuralt nätverksprognos, litiumbatteri SOC