Clear Sky Science · pl
GRNN–DP–MPC Współoptymalizacja do predykcyjnego zarządzania energią w hybrydowych UAV
Dlaczego mądrzejsze baterie w dronach mają znaczenie
Małe statki powietrzne bezzałogowe stają się wszechstronnymi narzędziami do zadań takich jak inspekcja linii energetycznych, dostarczanie przesyłek czy nadzór nad lasami. Mimo to jeden uporczywy limit pozostaje: czas lotu. Każda dodatkowa minuta w powietrzu oznacza więcej obszaru do przeszukania albo bezpieczniejszy powrót do bazy. W tym badaniu analizowane są drony zasilane energią słoneczną, które jednocześnie korzystają z akumulatorów litowych, i postawione jest proste pytanie o złożonej odpowiedzi: jak żonglować energią słoneczną i zgromadzoną energią, by statek pozostał dłużej w powietrzu, nie przeciążając przy tym baterii?
Mieszanie światła słonecznego z energią zgromadzoną
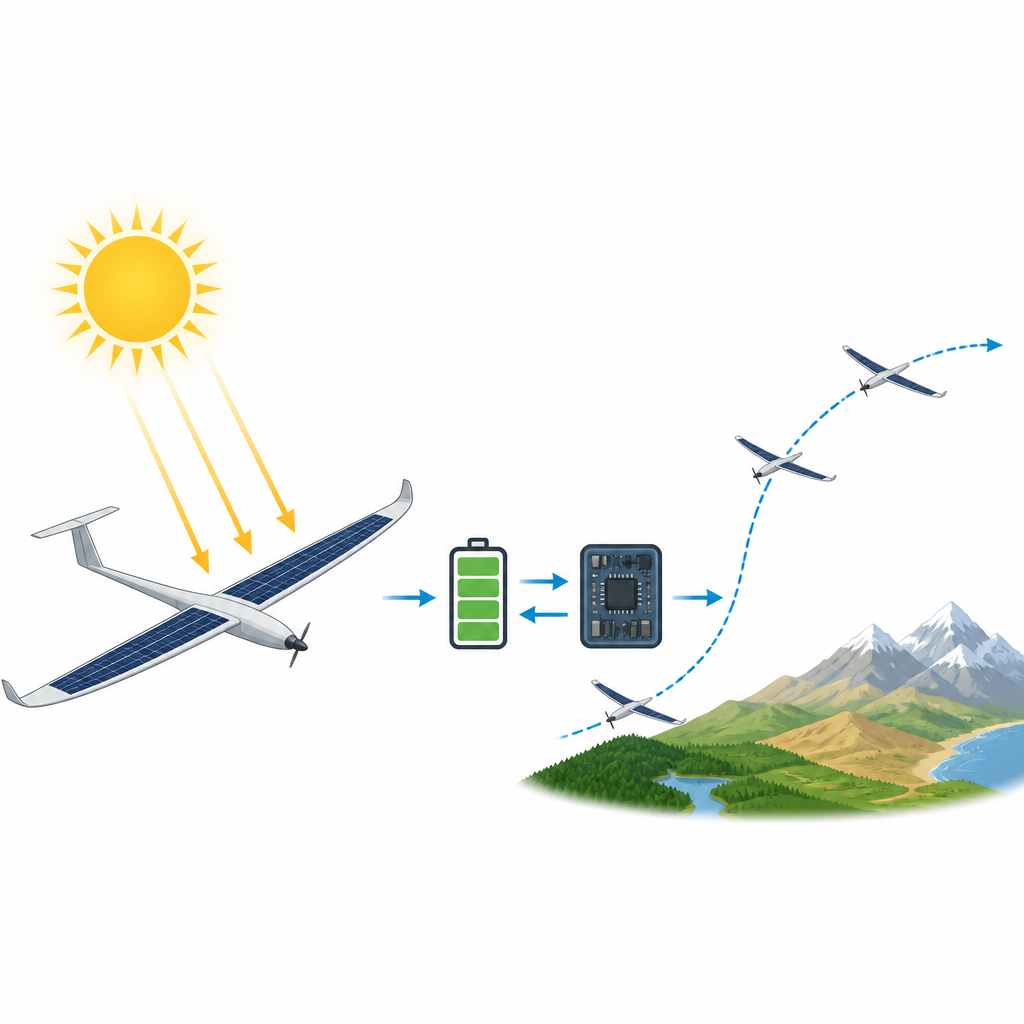
Solarne hybrydowe drony pobierają światło słoneczne przez cienkie, lekkie ogniwa fotowoltaiczne rozciągnięte na skrzydłach, podczas gdy akumulatory litowe wypełniają luki podczas cienia, stromych wzniesień czy pochmurnej pogody. Autorzy najpierw budują szczegółowy obraz przepływu energii w takim samolocie. Opisują, jak panele przetwarzają światło w zależności od kąta padania słońca i postawy lotu, jak akumulator się ładuje i rozładowuje bez nadmiernego obciążania oraz jak silniki, awionika i ładunek pobierają moc w różnych fazach lotu. Ten zamknięty model pozwala śledzić dokładnie, skąd pochodzi każdy wat i dokąd trafia, stanowiąc trzon każdej bardziej zaawansowanej strategii sterowania.
Nauka drona patrzenia w przyszłość
Kluczowym problemem obecnych strategii energetycznych jest to, że reagują na to, co dzieje się teraz, zamiast uwzględniać, co wydarzy się za chwilę. Może to sprawić, że dron chciwie rozładuje akumulator na początku misji i będzie miał problemy później. Aby temu zapobiec, autorzy wykorzystują typ sztucznej sieci neuronowej, zwaną uogólnioną siecią regresyjną (generalized regression neural network, GRNN), do przewidywania krótkoterminowego zapotrzebowania na moc na podstawie niedawnej historii elektrycznej pojazdu. Zamiast mozolnie kodować każdy szczegół fizyczny, ta sieć uczy się wzorców z rzeczywistych danych lotu, takich jak typowe skoki mocy podczas startu czy stałe zużycie podczas przelotu. W testach na dziesiątkach tysięcy punktów danych ten predyktor szacuje napięcie baterii z błędami rzędu tylko kilku procent, dostarczając sterownikowi precyzyjne krótkoterminowe prognozy.
Planowanie najlepszego wykorzystania akumulatora
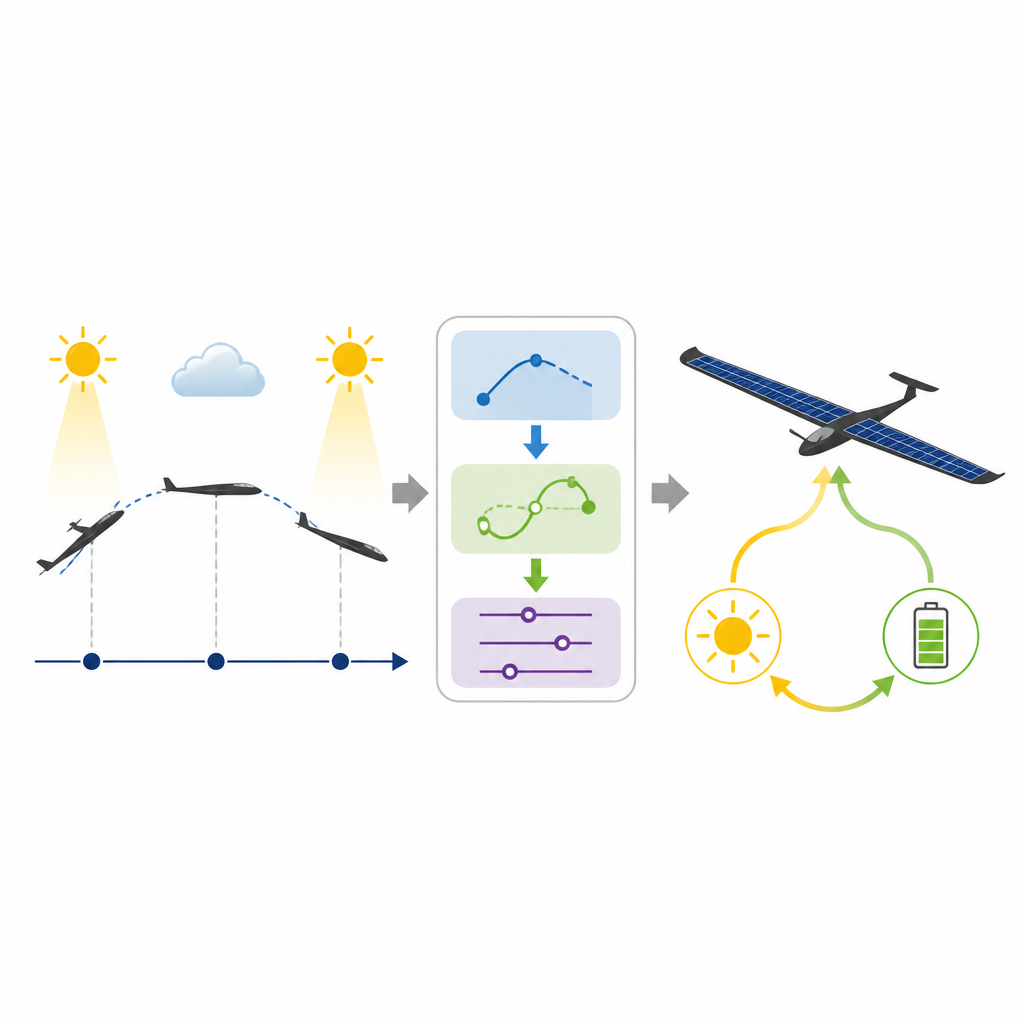
Patrzenie naprzód to tylko połowa historii; dron potrzebuje też sposobu na decyzję, jak rozdzielać pracę między słońce a baterię. W tym celu badacze przyjmują metodę planowania, która przeszukuje wiele możliwych opcji i wybiera te, które minimalizują użycie akumulatora w przyszłym oknie czasu, przy jednoczesnym zachowaniu bezpieczeństwa statku. Ten planista faworyzuje korzystanie z energii słonecznej, gdy jest dostępna, łagodnie ogranicza intensywne obciążanie baterii i utrzymuje ładunek akumulatora w zdrowym zakresie, aby zachować rezerwę na lądowanie. Ponieważ takie globalne przeszukiwanie może być wolne, umieszczają je w ramach toczącego się schematu sterowania, który wielokrotnie rozwiązuje krótszy, prostszy problem planistyczny, stosuje tylko pierwszą decyzję, a następnie aktualizuje plan, gdy pojawiają się nowe pomiary i prognozy.
Utrzymywanie akumulatora w ryzach w czasie rzeczywistym
W długich lotach drobne błędy w pomiarze prądu lub napięcia mogą powodować, że szacowany stan naładowania akumulatora będzie dryfować względem rzeczywistości, co jest ryzykowne dla statku, który nigdy nie powinien niespodziewanie rozładować się do zera. Dlatego autorzy wplatają w swój system kilka kontroli bezpieczeństwa. Predykcja napięcia sieci neuronowej jest stale porównywana z odczytami czujników; gdy różnica przekracza mały próg, szacowany ładunek jest korygowany. Dodatkowe kontrole porównują obliczaną i zmierzoną moc akumulatora i delikatnie kierują baterię z powrotem w stronę poziomu docelowego pod koniec każdego okna planowania. Te wielowarstwowe zabezpieczenia utrzymują obraz akumulatora w sterowniku blisko jego rzeczywistego stanu.
Co to oznacza dla przyszłych misji dronów
W testach w symulacjach i eksperymentach lotniczych na hybrydowym dronie o stałopłacie i wielowirnikowej konfiguracji nowa strategia zmniejszyła zapotrzebowanie na moc z akumulatora podczas wznoszenia i schodzenia oraz utrzymała stan naładowania bardziej stabilny niż zarówno metoda oparta na regułach, jak i niedawne podejście uczące się. W praktyce oznacza to, że akumulator jest używany oszczędniej, energia słoneczna wykonuje większą część pracy, a statek może przeznaczyć więcej swojej ograniczonej masy na użyteczny ładunek zamiast na przewymiarowane baterie. W skrócie: połączenie szybkiej predykcji, przemyślanego planowania i stałej korekty pozwala solarnym hybrydom wydłużyć czas lotu i działać bardziej niezawodnie — krok w stronę rutynowych misji długotrwałych na niskiej wysokości.
Cytowanie: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Słowa kluczowe: solarny hybrydowy UAV, zarządzanie energią, model predictive control, predykcja siecią neuronową, SOC akumulatora litowego