Clear Sky Science · ja
太陽光ハイブリッドUAVの予測エネルギー管理のためのGRNN–DP–MPC同時最適化
なぜドローンのバッテリー管理を賢くする必要があるのか
小型無人機は送電線の点検、荷物の配送、森林の監視などの仕事で頼りにされています。しかし依然として変わらない制約が一つあります:飛行時間です。空中での1分の延長が、より広い領域の観測やより安全な帰還を意味することがあります。本研究は太陽電池とリチウムバッテリーを併用するドローンに注目し、単純な問いを投げかけますが答えは複雑です:日光と蓄電をどうやりくりすれば、バッテリーに無理をさせずに機体をより長く飛ばせるか?
日光と蓄電の組み合わせ
太陽光ハイブリッドドローンは、翼面に広げた薄く軽量な太陽電池で日光を取り込み、日陰や急な上昇、曇りなどの電力ギャップをリチウム電池が埋めます。著者らはまず、こうした機体内部でエネルギーがどう流れるかを詳細にモデル化します。パネルが太陽角度や飛行姿勢に応じてどう電力を生み出すか、バッテリーが過負荷にならずにどう充放電するか、モーターや航空電子機器、ペイロードが飛行フェーズごとにどのように電力を消費するかを記述します。この閉ループモデルにより、どのワットがどこから来てどこへ行くかを正確に追跡でき、より賢い制御戦略の基盤が築かれます。
先を見越すようドローンに教える
現在のエネルギー戦略の大きな問題は、将来の状況ではなく現在起きていることに反応しがちな点です。それにより、ミッション序盤にバッテリーをむやみに消耗し、後半で苦労することがあります。これを避けるために著者らは、一般化回帰ニューラルネットワーク(GRNN)という種類の人工ニューラルネットワークを用い、直近の電気的履歴から機体の近未来の電力需要を予測します。すべての物理現象を手作業でモデル化する代わりに、このネットワークは離陸時の典型的な電力の急増や巡航時の一定の消費など、実飛行データからパターンを学習します。数万に及ぶデータ点での試験において、この予測器はバッテリー電圧を数パーセントの誤差で推定し、コントローラに短期的な正確な予測を与えます。
バッテリーの最適な使い方を計画する
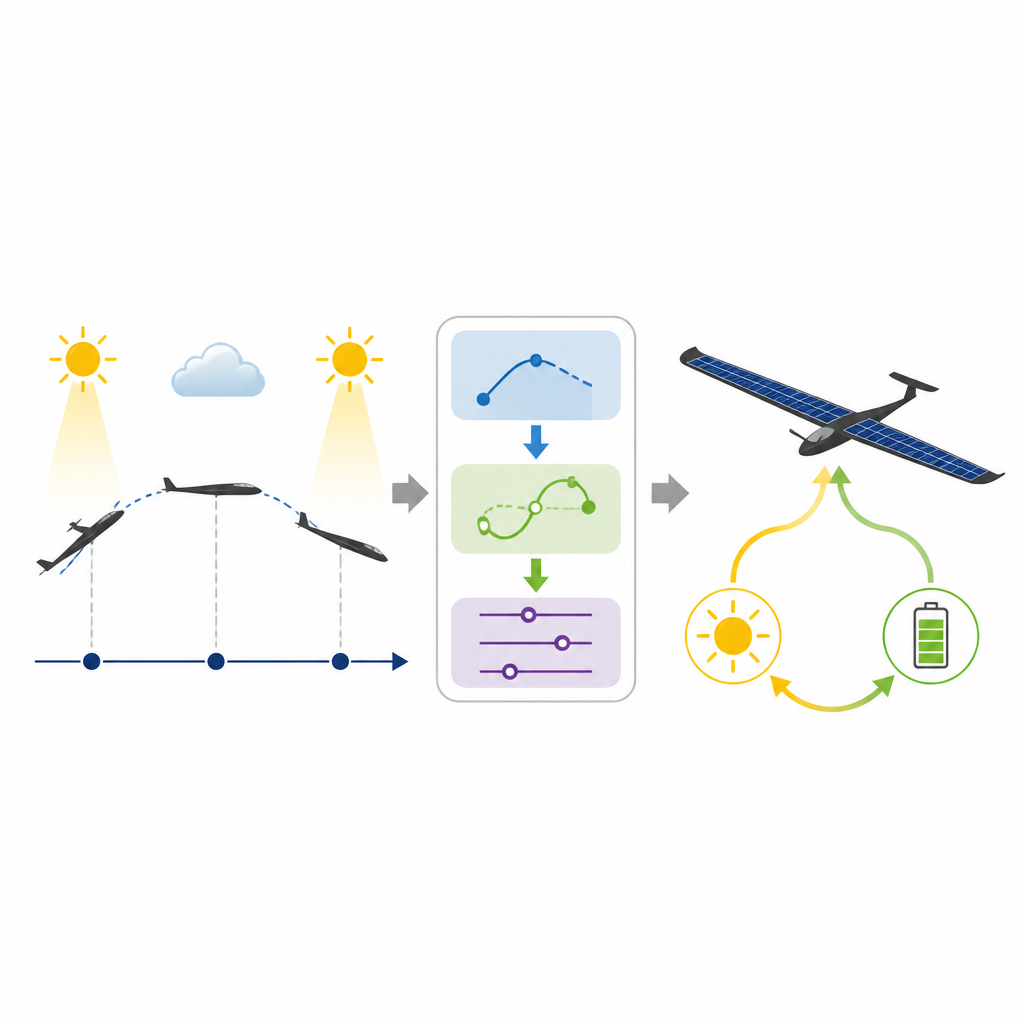
先を見越すことは半分に過ぎません。次に必要なのは、太陽電力とバッテリーのどちらにどれだけ負担させるかを決める仕組みです。ここでは、将来のある期間にわたってバッテリーの使用を最小化しつつ機体の安全を保つように、多数の選択肢を探索して最適解を選ぶプランニング手法を採用します。このプランナーは、利用できる場合は太陽電力を優先し、バッテリーへの負荷を穏やかに制限し、着陸に十分な余裕を残すように充電状態を健康な範囲に保ちます。広域探索は遅くなりがちなため、短く解きやすい計画問題を繰り返し解くローリング制御方式に入れて、最初の一手だけを適用し、新しい計測値や予測が入るたびに計画を更新します。
リアルタイムでバッテリー状態を正しく保つ
長時間飛行では、電流や電圧の小さな測定誤差が積み重なり、推定したバッテリー残量が実際とずれてしまうことがあり、予期せぬ電力切れは機体にとって致命的です。そこで著者らはシステムに複数の安全チェックを組み込みます。ニューラルネットの電圧予測はセンサ読み値と常時比較され、差が小さな閾値を超えた場合には推定残量が補正されます。さらに計算された電力と測定された電力を比較するチェックや、各計画ウインドウの終わりに向けてバッテリーを目標レベルへ穏やかに戻す仕組みも入れています。これらの多層的な保護により、コントローラが持つバッテリーの見積りは実際の状態と密接に一致します。
将来のドローンミッションに与える意味
ハイブリッド固定翼–マルチローター機でのシミュレーションと飛行実験では、この新しい戦略が上昇・下降時のバッテリー電力需要を削減し、残量の安定性をルールベース法や既存の学習ベース手法よりも高めました。実務的には、バッテリーの消費を抑え、太陽エネルギーがより多くの負荷を担い、機体の限られた重量を大型バッテリーではなく有用なペイロードに使えるということです。結論としては、高速予測、慎重な計画、継続的な補正を組み合わせることで太陽光ハイブリッドドローンは飛行時間を伸ばし、低高度での長時間ミッションを日常的に行う方向へ一歩進むことができる、ということです。
引用: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
キーワード: 太陽光ハイブリッドUAV, エネルギー管理, モデル予測制御, ニューラルネットワーク予測, リチウム電池SOC