Clear Sky Science · pt
Co-otimização GRNN–DP–MPC para gestão preditiva de energia em UAVs híbridos
Por que baterias mais inteligentes importam
Pequenas aeronaves não tripuladas estão se tornando ferramentas essenciais para tarefas como inspeção de linhas de transmissão, entrega de encomendas e vigilância de florestas. Ainda assim, um limite persistente permanece: o tempo de voo. Cada minuto extra no ar pode significar mais área inspecionada ou um retorno mais seguro à base. Este estudo analisa drones alimentados por energia solar que também carregam baterias de lítio e formula uma pergunta simples com uma resposta complexa: como gerenciar energia solar e energia armazenada para manter a aeronave no ar por mais tempo sem sobrecarregar as baterias?
Misturando luz do sol com energia armazenada
Drones híbridos solares captam luz por meio de células solares finas e leves distribuídas pelas asas, enquanto baterias de lítio cobrem lacunas de energia durante sombra, subidas íngremes ou tempo nublado. Os autores constroem primeiro um quadro detalhado de como a energia se movimenta numa aeronave desse tipo. Eles descrevem como os painéis convertem a luz em eletricidade dependendo do ângulo do sol e da postura de voo, como a bateria carrega e descarrega sem ser sobrecarregada, e como motores, aviônicos e cargas úteis consomem energia em diferentes fases do voo. Esse modelo em malha fechada permite rastrear exatamente de onde vem cada watt e para onde vai, formando a espinha dorsal de qualquer estratégia de controle mais inteligente.
Ensinando o drone a olhar adiante
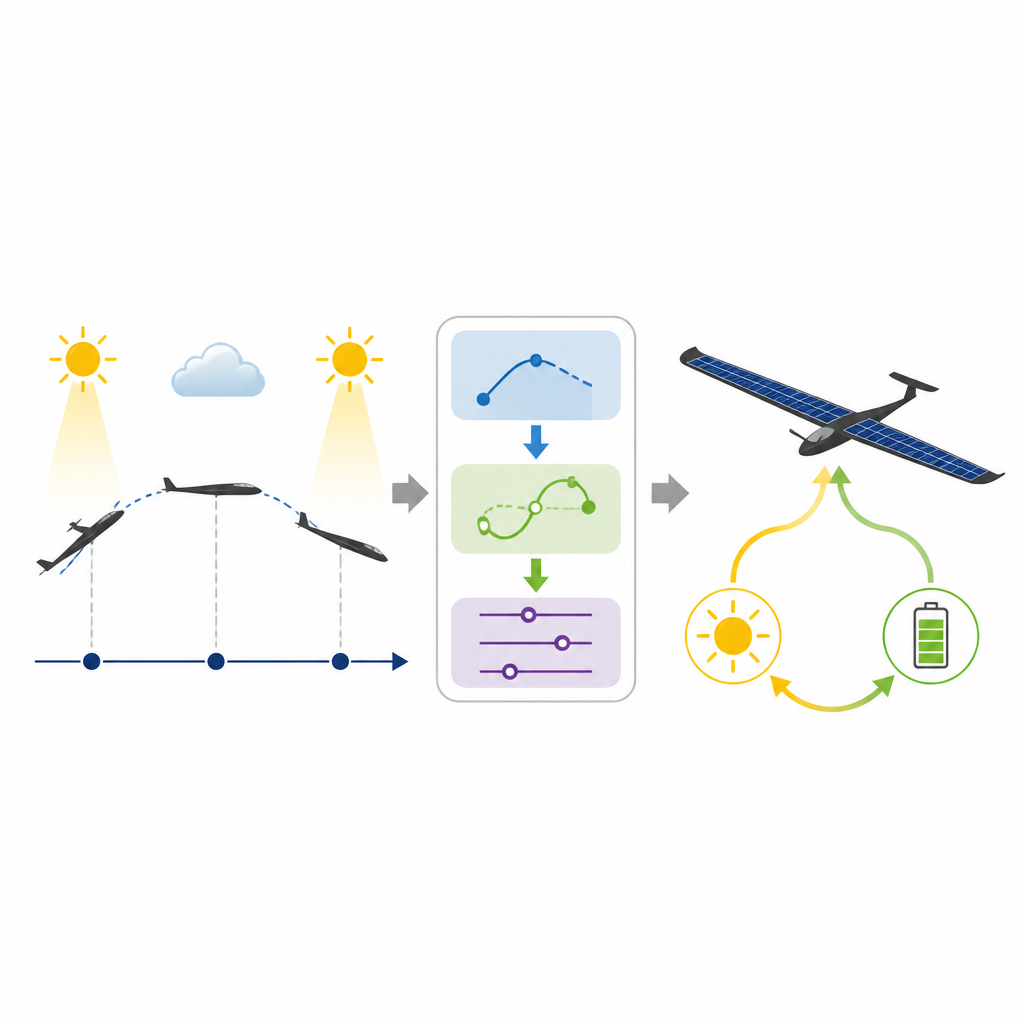
Um problema central nas estratégias atuais de energia é que elas reagem ao que está acontecendo agora em vez de ao que acontecerá a seguir. Isso pode levar um drone a drenar a bateria de forma voraz no início da missão e ter dificuldades depois. Para evitar isso, os autores usam um tipo de rede neural artificial, chamada rede neural de regressão generalizada (GRNN), para prever as necessidades de potência do veículo em curto prazo a partir de seu histórico elétrico recente. Em vez de codificar minuciosamente cada detalhe físico, essa rede aprende padrões a partir de dados reais de voo, como os picos típicos de potência durante a decolagem ou o consumo constante em cruzeiro. Em testes com dezenas de milhares de pontos de dados, esse preditor estima a tensão da bateria com erros de apenas alguns por cento, dando ao controlador uma previsão de curto prazo precisa.
Planejando o melhor uso da bateria
Olhar adiante é apenas metade da história; o drone também precisa decidir como repartir o trabalho entre o sol e a bateria. Para isso, os pesquisadores adotam um método de planejamento que busca entre muitas escolhas possíveis e seleciona aquelas que minimizam o uso da bateria ao longo de uma janela futura, mantendo a aeronave segura. Esse planejador favorece o uso da energia solar sempre que disponível, limita suavemente a intensidade de descarga da bateria e mantém a carga dentro de uma faixa saudável para que haja reserva suficiente para o pouso. Como essa busca global pode ser lenta, eles a envolvem em um esquema de controle receding-horizon que resolve repetidamente um problema de planejamento mais curto e mais simples, aplica apenas a primeira decisão e atualiza o plano à medida que novas medições e previsões chegam.
Mantendo a bateria honesta em tempo real
Em voos longos, erros pequenos na medição de corrente ou tensão podem fazer com que a estimativa de carga da bateria derive da realidade, o que é arriscado para uma aeronave que nunca deve ficar subitamente sem energia. Os autores, portanto, incorporam várias verificações de segurança em seu sistema. A previsão de tensão da rede neural é continuamente comparada com leituras dos sensores; quando a diferença excede um pequeno limiar, a carga estimada é corrigida. Verificações adicionais comparam potência calculada e medida da bateria e orientam suavemente a bateria de volta a um nível alvo ao final de cada janela de planejamento. Essas salvaguardas em camadas mantêm a representação da bateria pelo controlador alinhada com seu estado real.
O que isso significa para missões futuras de drones
Quando testada em simulações e experimentos de voo em um drone híbrido asa fixa–multirotor, a nova estratégia reduziu a demanda de energia da bateria durante subidas e descidas e manteve o estado de carga mais estável do que tanto um método baseado em regras quanto uma abordagem recente baseada em aprendizado. Em termos práticos, isso significa que a bateria é usada de forma mais parcimoniosa, a energia solar assume mais do trabalho e a aeronave pode dedicar mais de sua massa limitada à carga útil útil em vez de baterias superdimensionadas. Para o leitor, a conclusão é que combinar previsão rápida, planejamento cuidadoso e correção constante permite que drones híbridos solares estiquem seu tempo de voo e operem com mais confiabilidade, um passo rumo a missões rotineiras de longa resistência em baixa altitude.
Citação: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Palavras-chave: UAV híbrido solar, gestão de energia, controle preditivo de modelo, previsão por rede neural, estado de carga de bateria de lítio