Clear Sky Science · ru
Совместная оптимизация GRNN–DP–MPC для предиктивного управления энергопотреблением в гибридных БПЛА
Почему важны более умные батареи для дронов
Малые беспилотные летательные аппараты становятся рабочими лошадками для задач вроде инспекции линий электропередачи, доставки посылок и наблюдения за лесами. Но по‑прежнему существует одно серьёзное ограничение: время полёта. Каждая лишняя минута в воздухе может означать большую площадь обзора или более безопасное возвращение домой. В этом исследовании рассматриваются солнечные дроны, оснащённые литий‑батареями, и ставится простой вопрос с комплексным ответом: как распределять энергию от солнца и накопленную энергию так, чтобы аппарат дольше оставался в воздухе, не перегружая батарею?
Сочетание солнечной энергии с накопленной
Солнечные гибридные дроны улавливают свет с помощью тонких лёгких солнечных элементов, расположенных по крыльям, а литий‑батареи покрывают пробелы в питании при тени, крутом наборе высоты или пасмурной погоде. Авторы сначала создают подробную модель потоков энергии в таком аппарате. Они описывают, как панели преобразуют солнечный свет в электричество в зависимости от угла солнца и позы полёта, как батарея заряжается и разряжается без перегрузки, и как моторы, авионика и полезная нагрузка потребляют энергию в разных фазах полёта. Эта замкнутая модель позволяет точно отслеживать, откуда берётся каждый ватт и куда он расходуется, формируя основу для любой более умной стратегии управления.
Обучая дрона заглядывать вперёд
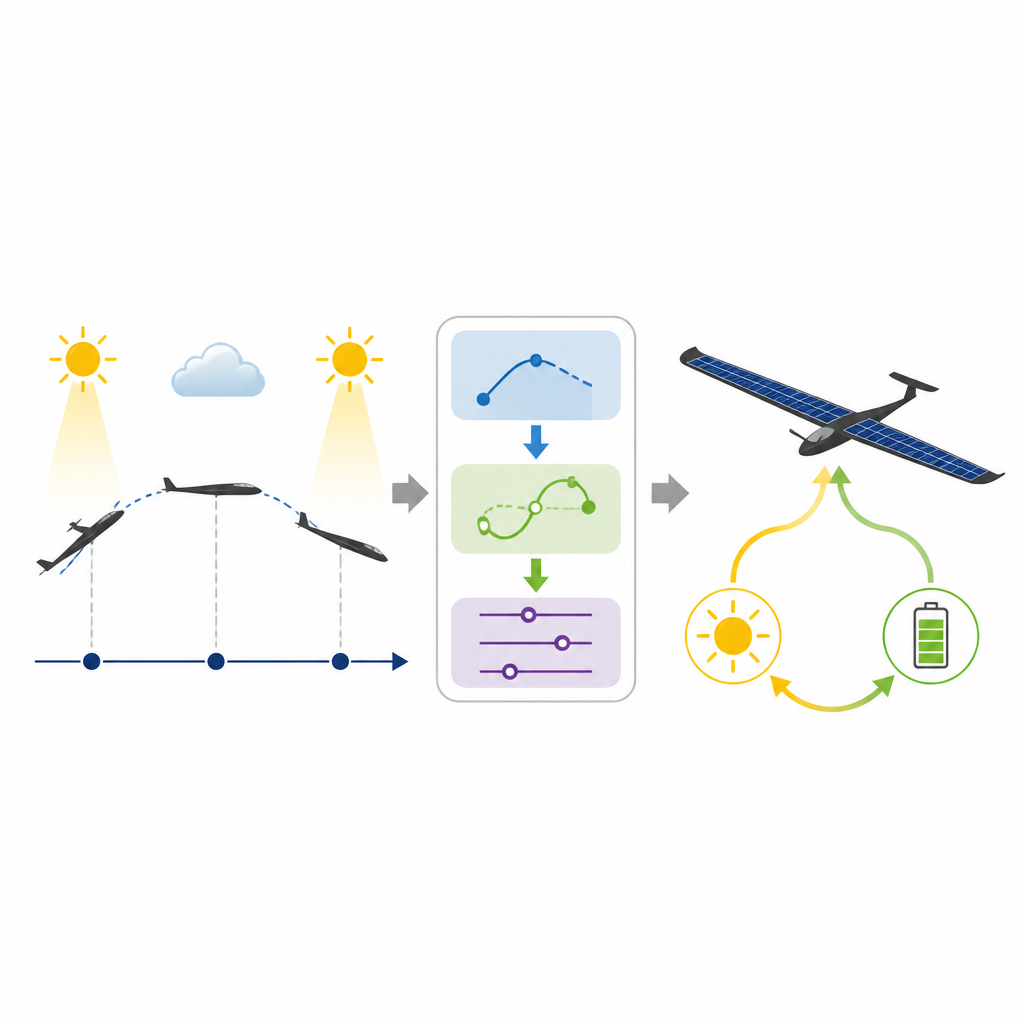
Ключевая проблема существующих стратегий управления энергией в том, что они реагируют на текущее состояние, а не на то, что произойдёт дальше. Это может привести к тому, что дрон расточительно разрядит батарею в начале миссии и позже столкнётся с трудностями. Чтобы этого избежать, авторы используют тип искусственной нейронной сети — обобщённую регрессионную нейронную сеть (GRNN) — чтобы предсказывать ближайшие потребности аппарата в мощности по его недавней электрической истории. Вместо того чтобы вручную моделировать каждую физическую деталь, эта сеть учится на реальных полётных данных, распознавая типичные скачки мощности при взлёте или устойчивое потребление при крейсерском полёте. В тестах на десятках тысяч точек данных этот предсказатель оценивает напряжение батареи с погрешностью всего в несколько процентов, давая контроллеру точный краткосрочный прогноз.
Планирование оптимального использования батареи
Заглянуть вперёд — это только половина задачи; дрону также нужен механизм, который решит, как распределить работу между солнцем и батареей. Для этого исследователи применяют метод планирования, который перебирает множество возможных вариантов и выбирает те, которые минимизируют использование батареи в течение будущего окна, одновременно обеспечивая безопасность аппарата. Этот планировщик предпочитает использовать солнечную энергию, когда она доступна, аккуратно ограничивает нагрузки на батарею и поддерживает заряд в здоровом диапазоне, чтобы оставался запас для посадки. Так как глобальный перебор может быть медленным, его помещают в схему скользящего управления: неоднократно решается более короткая, проще формулируемая задача, применяется только первое решение, затем план обновляется по мере поступления новых измерений и прогнозов.
Поддержание честности батареи в реальном времени
В длительных полётах небольшие ошибки в измерении тока или напряжения могут привести к смещению оценки заряда батареи относительно реального состояния, что опасно для аппарата, который не должен внезапно сесть без питания. Поэтому авторы внедряют в систему несколько уровней проверок безопасности. Прогноз напряжения нейронной сети непрерывно сравнивается с показаниями датчиков; когда расхождение превышает небольшой порог, оценка заряда корректируется. Дополнительные проверки сопоставляют вычисленную и измеренную мощность батареи и мягко направляют батарею к целевому уровню заряда к концу каждого планировочного окна. Эти многоуровневые меры сохраняют представление контроллера о батарее максимально близким к её реальному состоянию.
Что это значит для будущих миссий дронов
При испытаниях в моделировании и полётных экспериментах на гибридном аппарате со смешанным крылом и мультикоптерной конфигурацией новая стратегия снизила потребность в мощности батареи при наборе и снижении высоты и держала состояние заряда более стабильным по сравнению как с эвристическим методом, так и с недавно предложенным подходом на основе обучения. Практически это означает более экономное использование батареи, большую долю работы, выполняемую солнечной энергией, и возможность выделять больший процент ограниченной массы аппарата на полезную нагрузку вместо избыточных батарей. Вывод для читателя: сочетание быстрого прогнозирования, продуманного планирования и постоянной коррекции позволяет солнечным гибридным дронам увеличивать время полёта и работать надёжнее — шаг к регулярным миссиям длительного действия на малой высоте.
Цитирование: Kan, W., Chen, S., Lei, W. et al. GRNN–DP–MPC Co-optimization for predictive energy management in hybrid UAVs. Sci Rep 16, 15107 (2026). https://doi.org/10.1038/s41598-026-44118-y
Ключевые слова: солнечный гибридный БПЛА, управление энергией, предиктивное управление моделью, нейронная сеть для предсказания, состояние заряда литий‑батареи