Clear Sky Science · tr
İnsan merkezli tasarım tabanlı hafif giyilebilir IMU insan poz tahmini
Neden Daha Hızlı Vücut Takibi Önemli?
Fizyoterapi kliniklerinden sanal gerçeklik başlıklarına kadar birçok yeni teknoloji, vücudumuzun gerçek zamanlı hareketini anlamaya dayanıyor. Bugün bu genellikle kameralar, işaretleyiciler veya tüm gün takılması zor, hantal bilgisayarlar gerektiriyor. Bu çalışma, akıllı telefonlar ve akıllı saatlerdeki gibi küçük hareket sensörlerinin, zeki algoritmalarla birleştirilerek çok az enerji kullanarak neredeyse anında tam vücut pozunu tahmin edebileceğini araştırıyor. Amaç basit: hareket takibini ciddi kullanım için yeterince doğru yapmak, fakat günlük giyilebilir cihazlara gizlenebilecek kadar hafif ve verimli hale getirmek.
Küçük Sensörler, Büyük Hareketler
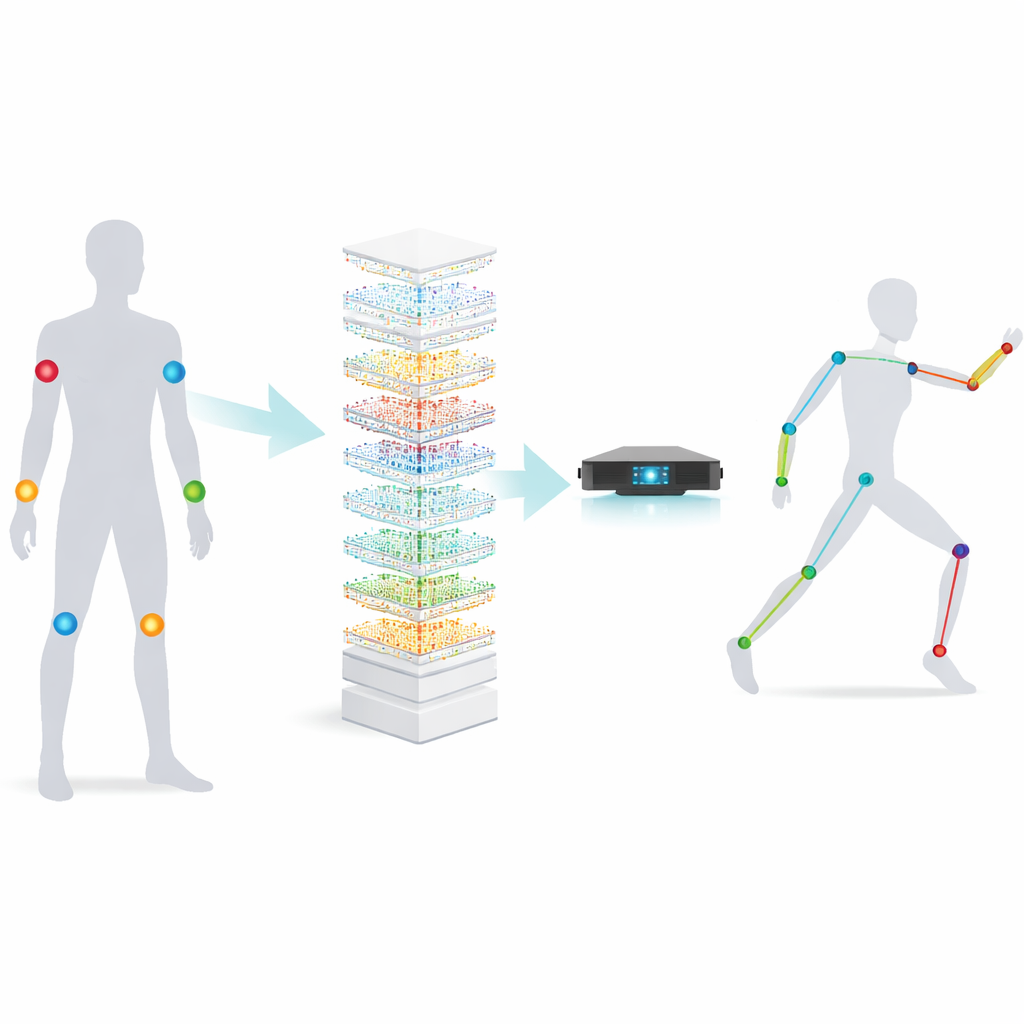
Çalışma, ataletsel ölçüm birimleri veya IMU’lar etrafında şekilleniyor—kibrit kutusu büyüklüğünde, ivme ve dönüşü ölçen cihazlar. Vücudun birkaç kilit noktasına yerleştirildiğinde, IMU’lar kalabalık odalar veya gece dışarıda kameraların göremediği durumlarda bile nasıl hareket ettiğimizi algılayabiliyor. Zorluk, bu ham sensör okumalarını ayrıntılı bir 3B vücut pozuna dönüştürmenin karmaşık bir bulmaca olması: cihazın elinde yalnızca birkaç sinyal var, oysa birçok eklemin konumunu, farklı insanlarda ve çeşitli hareketlerde çıkarması gerekiyor. Önceki yöntemler derin tekrarlı ağlar ve Transformer’lar gibi büyük sinir ağları kullandı; bunlar doğru ancak ağır—çok fazla bellek, enerji ve zaman gerektiriyor, bu da onları küçük giyilebilir cihazlar için uygun olmaktan çıkarıyor.
Küçük Bir Modeli Büyük Bir Model Gibi Düşünmeye Öğretmek
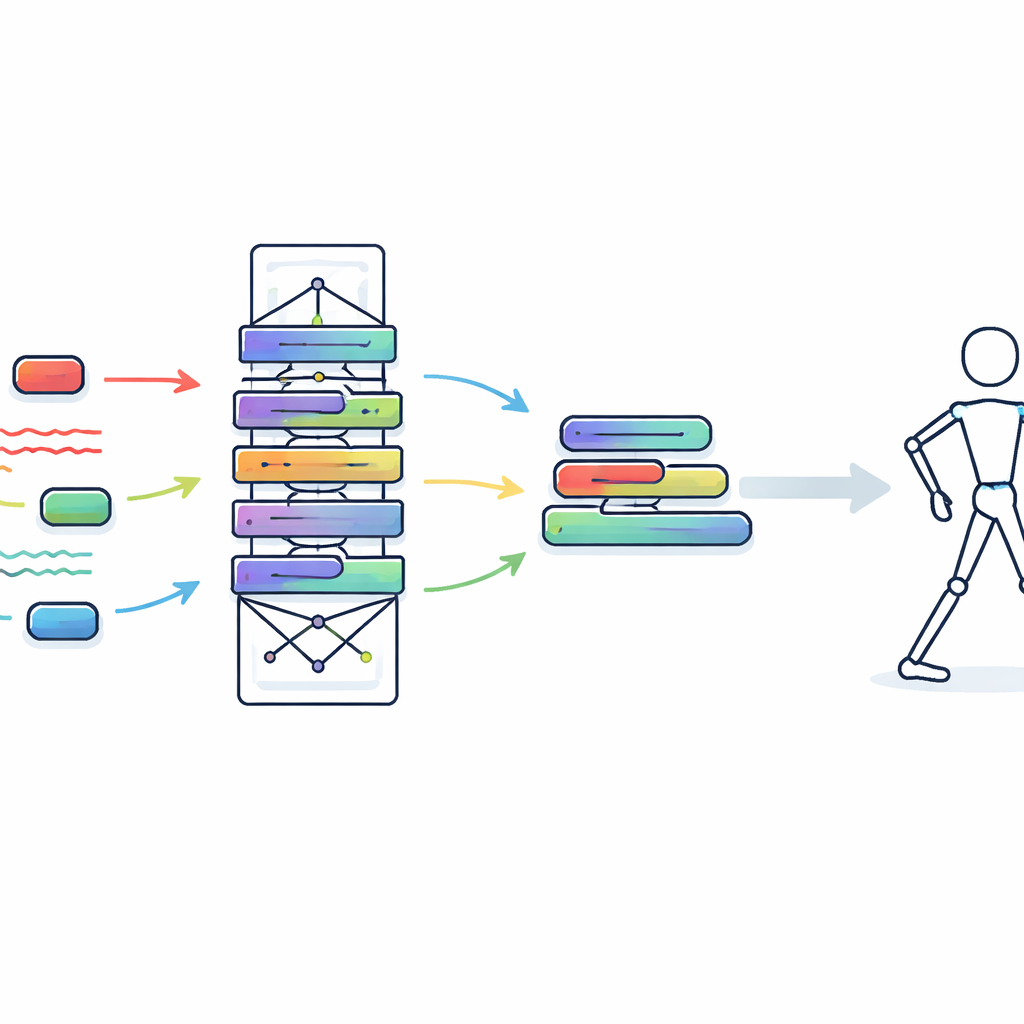
Yazarlar, bir öğrencinin öğretmenden öğrendiği şekilde ilham alan iki aşamalı bir strateji öneriyor. Laboratuvarda eğitim sırasında, “öğretmen” olarak büyük, güçlü bir Transformer modeli kullanılarak sensör verileri zaman ve vücut konumları boyunca derinlemesine analiz ediliyor. Paralel olarak, verideki yerel desenlere esnekçe uyum sağlayabilen ve standart konvolüsyonlardan çok daha az parametre kullanan involution adlı bir işlemden inşa edilmiş daha küçük bir “öğrenci” modeli tasarlanıyor. Bilgi damıtma (knowledge distillation) olarak bilinen bir süreçle, öğrenci yalnızca nihai poz çıktılarıyla eşleşmiyor; aynı zamanda öğretmenin içsel özellik desenlerini taklit etmeye teşvik ediliyor. Bu şekilde öğrenci, konuşlandırıldığında öğretmenin boyutuna ve karmaşıklığına ihtiyaç duymadan sensörlerden hareket okumayı sağlayan yüksek seviyeli ipuçlarını kademeli olarak öğreniyor.
Bir Eğitim Ağını Küçük Bir Çalışma Zamanı Motoruna Dönüştürmek
Öğrenci modelini gerçekten giyilebilir dostu yapmak için araştırmacılar yapısal yeniden-parametrizasyon (structural re-parameterization) adlı bir prosedürle bir adım daha ileri gidiyor. Eğitim sırasında öğrenci bloğu, öğrenme esnekliğini maksimize etmek için birkaç dal, normalizasyon adımları ve adaptif çekirdekler içeriyor. Konuşlandırmadan önce bu parçaların tümü matematiksel olarak tek, sadeleştirilmiş bir hesaplamaya birleştiriliyor; bu hesaplama iki basit tek boyutlu konvolüsyon gibi davranıyor. Bu katlama süreci modelin davranışını koruyor ancak ekstra katmanları ve işlemleri ortadan kaldırıyor. Standart konvolüsyon modern donanımda yoğun şekilde optimize edildiğinden, bu dönüşüm her kareyi işlemek için gereken zaman ve enerjiyi önemli ölçüde azaltıyor, ağın öğrendiklerinden ödün vermeden.
Pratikte Ne Kadar İyi Çalışıyor?
Ekip yaklaşımını, IMU’lar ve yüksek doğruluklu hareket yakalama sistemleri ile eşzamanlı kaydedilmiş günlük ve atletik aktivitelerden milyonlarca kare içeren DIP-IMU ve IMUPoser olmak üzere iki halka açık hareket veri kümesinde değerlendiriyor. Hafif modelleri, ortalama eklem hatasında en iyi mevcut yöntemlerle eşleşiyor veya onlara yakın sonuç veriyor—DIP-IMU’da 81 milimetre ve IMUPoser’da 94 milimetre; en güçlü taban çizgilerinin yaklaşık %1’i civarında bir farkla. Aynı zamanda bir ila iki mertebe daha hızlı çalışıyor: her kare yaklaşık 0.011–0.012 milisaniyede işleniyor; rakip sistemlerin birkaç onda biri milisaniyeden neredeyse tam bir milisaniyeye kadar süren süreleriyle karşılaştırıldığında bu çok daha hızlı. Bu hız, bir GPU üzerinde saniyede on binlerce kareye denk geliyor; bu, herhangi bir giyilebilir cihazın gerçekten ihtiyaç duyduğunun çok ötesinde, pil tasarrufu ve diğer cihaz içi görevler için bolca alan bırakıyor.
Günlük Giyilebilir Cihazlar İçin Ne Anlama Geliyor?
Uzman olmayanlar için temel çıkarım, yazarların "yoğun düşünmeyi" "hızlı hareket etmekten" ayırmanın bir yolunu bulmuş olmalarıdır. Büyük bir model, eğitim sırasında insan hareketini zengin detayıyla anlamak için yoğun şekilde düşünebilir; çok daha küçük bir model—özenle öğretilip sonra basitleştirilmiş—bileğinizdeki bantta, başlığınızdaki cihazda veya rehabilitasyon atelinizde gerçek zamanlı işi yapar. Sonuç, ağır laboratuvar sistemleri kadar neredeyse doğru vücut takibi ama düşük güçlü, her zaman açık cihazlar için yeterince yalın bir çözüm. Bu, egzersiz sırasında zamanında geri bildirim verebilen, işteki güvensiz hareketler konusunda uyarıda bulunabilen veya sanal dünyaların bedenlerimize daha doğal tepki vermesini sağlayan giyilebilir cihazların önünü açıyor; tüm bunlar hantal donanım veya hızlı pil boşalması olmadan mümkün hale geliyor.
Atıf: Wang, L., Liu, J., Xue, J. et al. Human-centered design-based lightweight wearable IMU human pose estimation. Sci Rep 16, 11420 (2026). https://doi.org/10.1038/s41598-026-41004-5
Anahtar kelimeler: giyilebilir sensörler, insan poz tahmini, ataletsel ölçüm birimleri, hafif sinir ağları, gerçek zamanlı hareket takibi