Clear Sky Science · he
אמידת תנוחת גוף באמצעות חיישני IMU ניידים קלים על בסיס עיצוב ממוקד-אדם
מדוע מעקב גוף מהיר יותר חשוב
מטיפולי פיזיותרפיה ועד משקפי מציאות מדומה, טכנולוגיות רבות מסתמכות על הבנת תנועת הגוף בזמן אמת. כיום הדבר דורש לעתים מצלמות, מארקרים או מחשבים כבדים שקשה לשאת כל היום. המחקר הזה בוחן כיצד חיישני תנועה זעירים, דומים לאלה שבטלפונים חכמים ושעוני יד, יכולים להשתלב עם אלגוריתמים חכמים כדי לאמוד תנוחת גוף מלאה כמעט מידית ובהצרכה נמוכה של אנרגיה. המטרה פשוטה: להפוך את מעקב התנועה למדויק מספיק לשימוש רציני, אך קל ויעיל מספיק כדי להשתלב במכשירים נלבשים יומיומיים.
חיישנים קטנים, תנועות גדולות
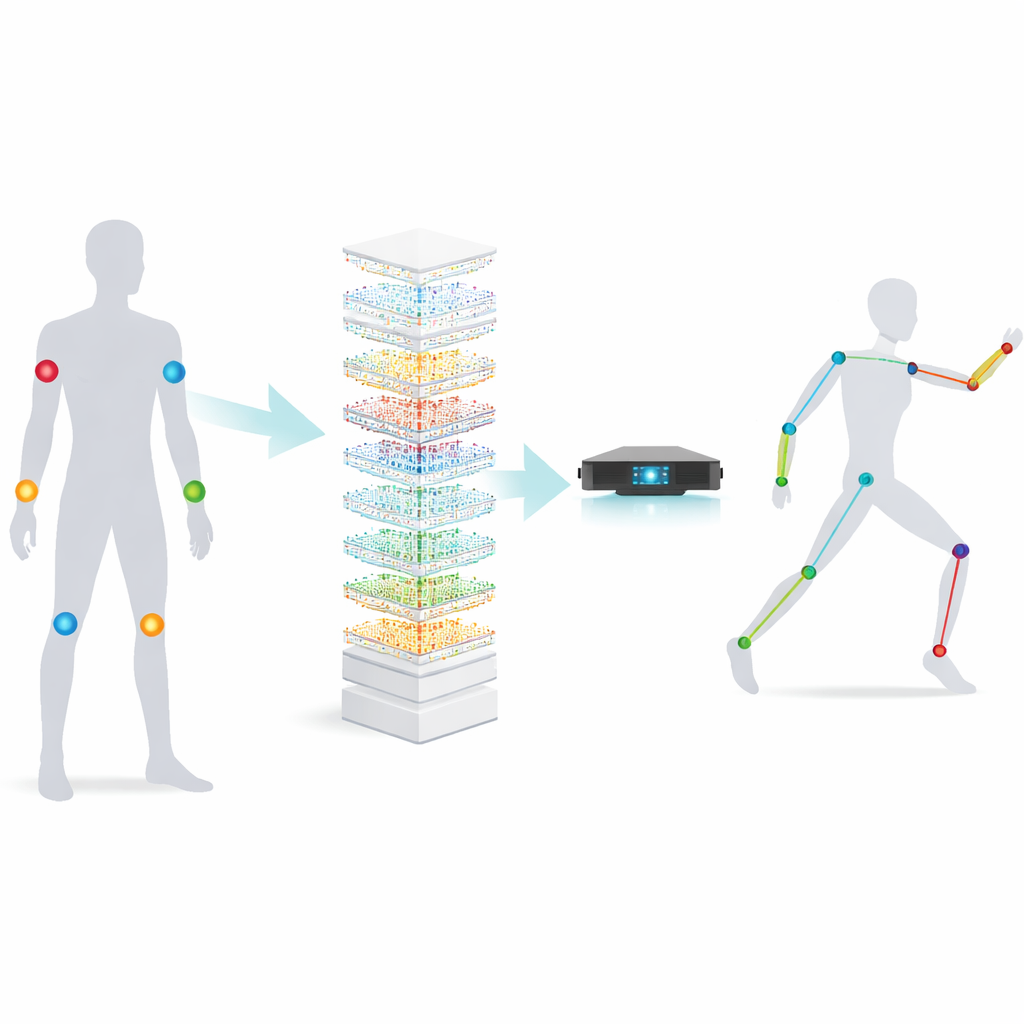
העבודה מתמקדת ביחידות מדידה惯טיות, או IMU—מכשירים בגודל קופסת גפרורים שמודדים תאוצה וסיבוב. ממוקמות בכמה נקודות מפתח על הגוף, IMU יכולות לחוש את התנועה גם כשמצלמות אינן רואות אותנו, למשל בחללים צפופים או בחוץ בלילה. האתגר הוא להפוך קריאות חיישן גולמיות לאמוד מפורט של גוף תלת־ממדי: למכשיר יש רק כמה אותות, ובכל זאת עליו להסיק את מיקום המפרקים הרבים, באנשים שונים, המבצעים פעולות מגוונות. שיטות קודמות השתמשו ברשתות נוירוניות גדולות, כגון רשתות חוזרות עמוקות וטרנספורמרים, שהן מדויקות אך כבדות—הן דורשות זיכרון, אנרגיה וזמן רבים, מה שהופך אותן לבלתי מתאימות למכשירים נלבשים קטנים.
להכשיר מודל קטן לחשוב כמו גדול
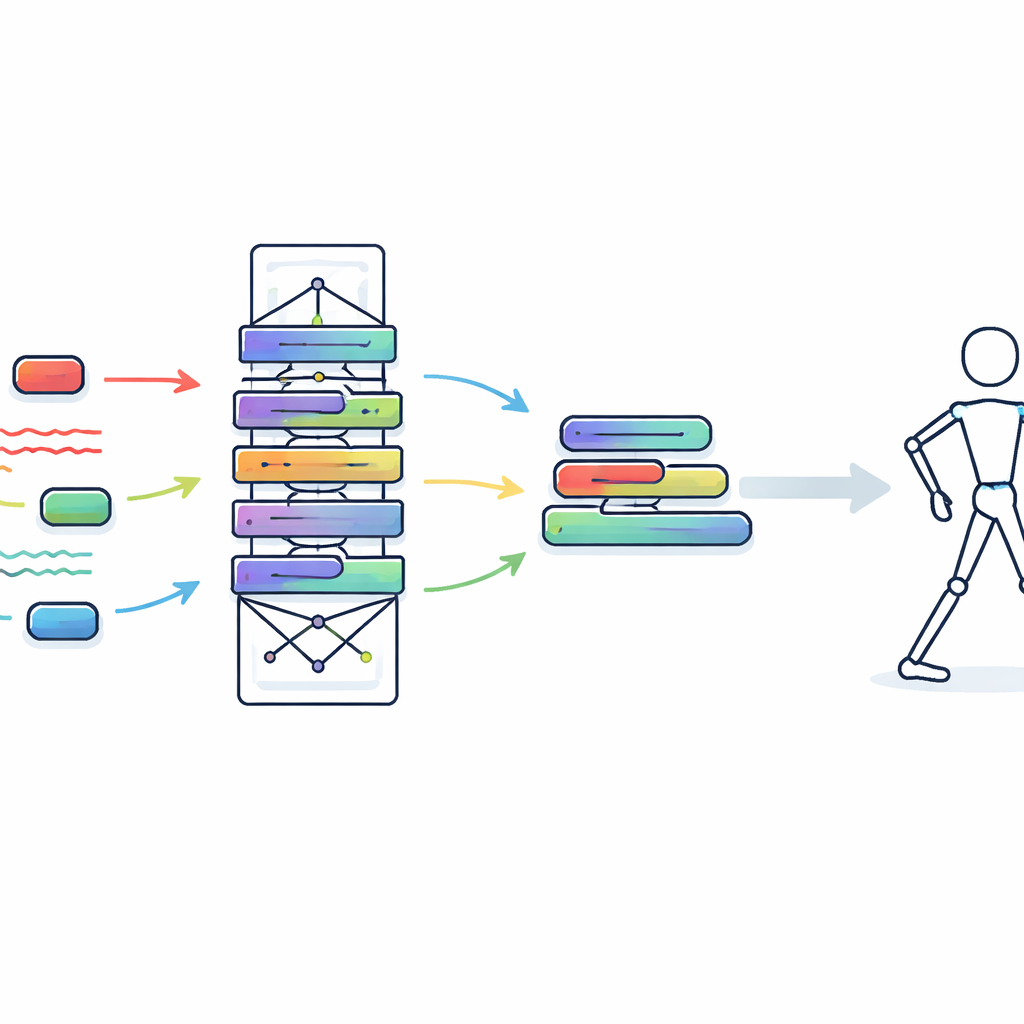
המחברים מציעים אסטרטגיה בשני שלבים בהשראת למידה של תלמיד ממורה. במהלך האימון במעבדה הם משתמשים במודל טרנספורמר גדול וחזק כ"מורה" כדי לנתח לעומק את נתוני החיישנים על פני הזמן ובין מיקומי הגוף. במקביל הם מעצבים "תלמיד" קטן יותר המבוסס על פעולת אינוולוציה, שיכולה להתאים גמיש לדפוסים מקומיים בנתונים תוך שימוש בהרבה פחות פרמטרים מאשר קונבולוציה סטנדרטית. באמצעות תהליך של דיסטילציה של ידע, התלמיד אינו רק מתאים את פלטי התנוחה הסופיים; הוא גם מונחה לחקות את דפוסי התכונות הפנימיים של המורה. כך, התלמיד רוכש בהדרגה טכניקות ברמה גבוהה לקריאת תנועה מהחיישנים מבלי להזדקק לגודלו ומורכבותו של המורה בפריסה שוטפת.
להפוך רשת אימון למנוע ריצה זעיר
כדי להפוך את מודל התלמיד לידידותי באמת לנשיאה, החוקרים לוקחים צעד נוסף עם הליך שנקרא רה־פרמטריזציה מבנית. בזמן האימון, בלוק התלמיד כולל מספר ענפים, שלבי נורמליזציה וגרעינים אדפטיביים כדי למקסם את גמישות הלמידה. לפני פריסה, כל החלקים האלה נמסרים מתמטית לחישוב מאוחד ויעיל שמתנהג כשתיים של קונבולוציות חד־ממדיות פשוטות. תהליך הקימוץ הזה שומר על התנהגות המודל אך מבטל שכבות ופעולות מיותרות. מאחר שקונבולוציה סטנדרטית מותאמת בחוזקה לחומרה מודרנית, הטרנספורמציה מקטינה באופן דרסטי את הזמן והאנרגיה הנדרשים לעיבוד כל פריים, מבלי לפגוע במה שהרשת ראתה ולמדה.
כמה טוב זה עובד בפועל?
הצוות מעריך את הגישה על שני מאגרי תנועה ציבוריים, DIP-IMU ו-IMUPoser, שמכילים מיליוני פריימים של אנשים המבצעים פעילויות יום־יומיות ואתלטיות, שצולמו במקביל עם IMU ומערכות תפיסת תנועה בעלות דיוק גבוה. המודל הקל שלהם משווה או מתקרב לביצועים של השיטות הטובות ביותר בטעות ממוצעת של מפרק—81 מילימטר ב-DIP-IMU ו-94 מילימטר ב-IMUPoser, בערך בטווח של 1% מהבסיסים החזקים ביותר. במקביל, הוא רץ פי עשרות עד מאות מהר יותר: כל פריים מעובד בכ־0.011–0.012 מילישניות, לעומת כמה עשיריות מילישנייה עד כמעט מילישנייה עבור מערכות מתחרות. המהירות הזו מתרגמת לעשרות אלפי פריימים בשנייה על GPU, הרבה מעבר לצורך של מכשיר נלבש כלשהו, ומשאירה מרווח ניכר לחיסכון בסוללה ולמשימות נוספות במכשיר.
מה המשמעות עבור מכשירים נלבשים יומיומיים
לא-מומחים, המסקנה המרכזית היא שהמחברים מצאו דרך להפריד בין "לחשוב עמוק" לבין "לפעול מהר". מודל גדול יכול לחשוב עמוק במהלך האימון כדי להבין תנועת אדם בפירוט רב, בעוד שמודל קטן בהרבה—המוכשר בקפידה ואז מפושט—מטפל בעבודה בזמן אמת על רצועת יד, משקף או מייצב שיקום. התוצאה היא מעקב גוף כמעט מדויק כמו מערכות מעבדה כבדות אך קומפקטי מספיק למכשירים תמידיים בעלות זרימת אנרגיה נמוכה. זה פותח את הדרך למכשירים נלבשים שיכולים לספק משוב בזמן אימון, לאותת על תנועות מסוכנות בעבודה או לגרום לעולמות וירטואליים להגיב באופן טבעי יותר לגופנו, כל זאת ללא חומרה מגושמת או צריכה מהירה של סוללה.
ציטוט: Wang, L., Liu, J., Xue, J. et al. Human-centered design-based lightweight wearable IMU human pose estimation. Sci Rep 16, 11420 (2026). https://doi.org/10.1038/s41598-026-41004-5
מילות מפתח: חיישנים נלבשים, אמידת תנוחת גוף, יחידות מדידה惯טיות (IMU), רשתות נוירוניות קלות, מעקב תנועה בזמן אמת