Clear Sky Science · ar
تقدير وضعية الإنسان باستخدام وحدات قياس惯ية قابلة للارتداء خفيفة مبنية على تصميم يركز على الإنسان
لماذا يهم تسريع تتبع الجسم
من عيادات العلاج الطبيعي إلى سماعات الواقع الافتراضي، تعتمد العديد من التقنيات الحديثة على فهم كيفية تحرك أجسامنا في الزمن الحقيقي. اليوم غالبًا ما يتطلب ذلك كاميرات أو علامات أو حواسيب ضخمة يصعب ارتداؤها طوال اليوم. تستكشف هذه الدراسة كيف يمكن دمج حساسات حركة صغيرة — مماثلة لتلك الموجودة في الهواتف الذكية والساعات الذكية — مع خوارزميات ذكية لتقدير وضعية الجسم بالكامل تقريبًا في الحال، مع استهلاك طاقة قليل جدًا. الهدف بسيط: جعل تتبع الحركة دقيقًا بما يكفي للاستخدام الجاد، لكنه خفيف وفعال لدرجة أن يندمج في الأجهزة القابلة للارتداء اليومية.
حساسات صغيرة، حركات كبيرة
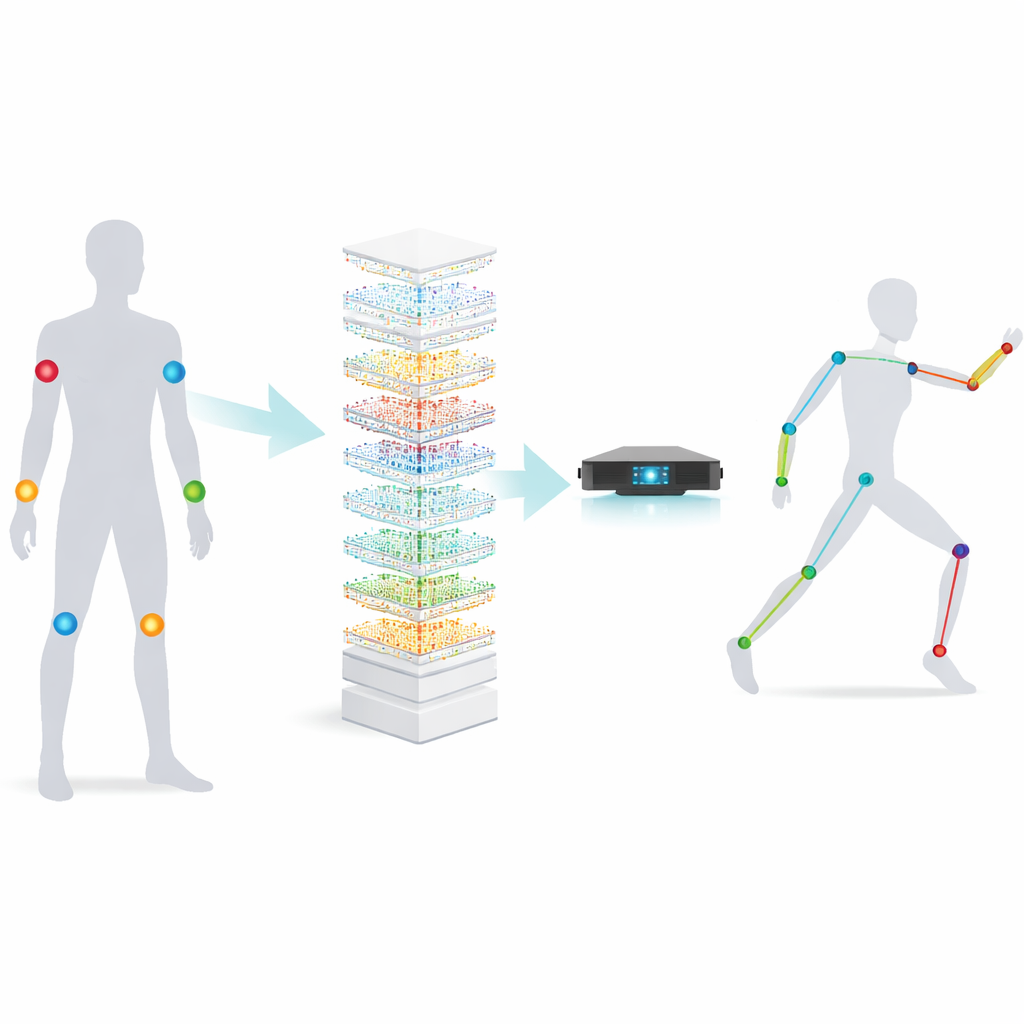
تركز هذه العمل على وحدات القياس惯ية، أو IMUs—أجهزة بحجم علبة الثقاب تقيس التسارع والدوران. عند وضعها على عدة مواقع رئيسية في الجسم، يمكن للـ IMUs استشعار كيفية تحركنا حتى عندما لا تستطيع الكاميرات رؤيتنا، مثلًا في الغرف المزدحمة أو في الهواء الطلق ليلًا. التحدي يكمن في أن تحويل هذه القراءات الخام إلى وضعية ثلاثية الأبعاد مفصلة للجسم هو لغز معقد: الجهاز يمتلك عددًا محدودًا من الإشارات، ومع ذلك يجب عليه استنتاج مواقع العديد من المفاصل، لأشخاص مختلفين، يؤدون حركات متنوعة. استخدمت الطرق السابقة شبكات عصبية كبيرة، مثل الشبكات التكرارية العميقة وTransformers، التي تكون دقيقة لكنها ثقيلة—تتطلب ذاكرة وطاقة ووقتًا كبيرًا، مما يجعلها غير ملائمة للأجهزة القابلة للارتداء الصغيرة.
تعليم نموذج صغير ليفكر مثل نموذج كبير
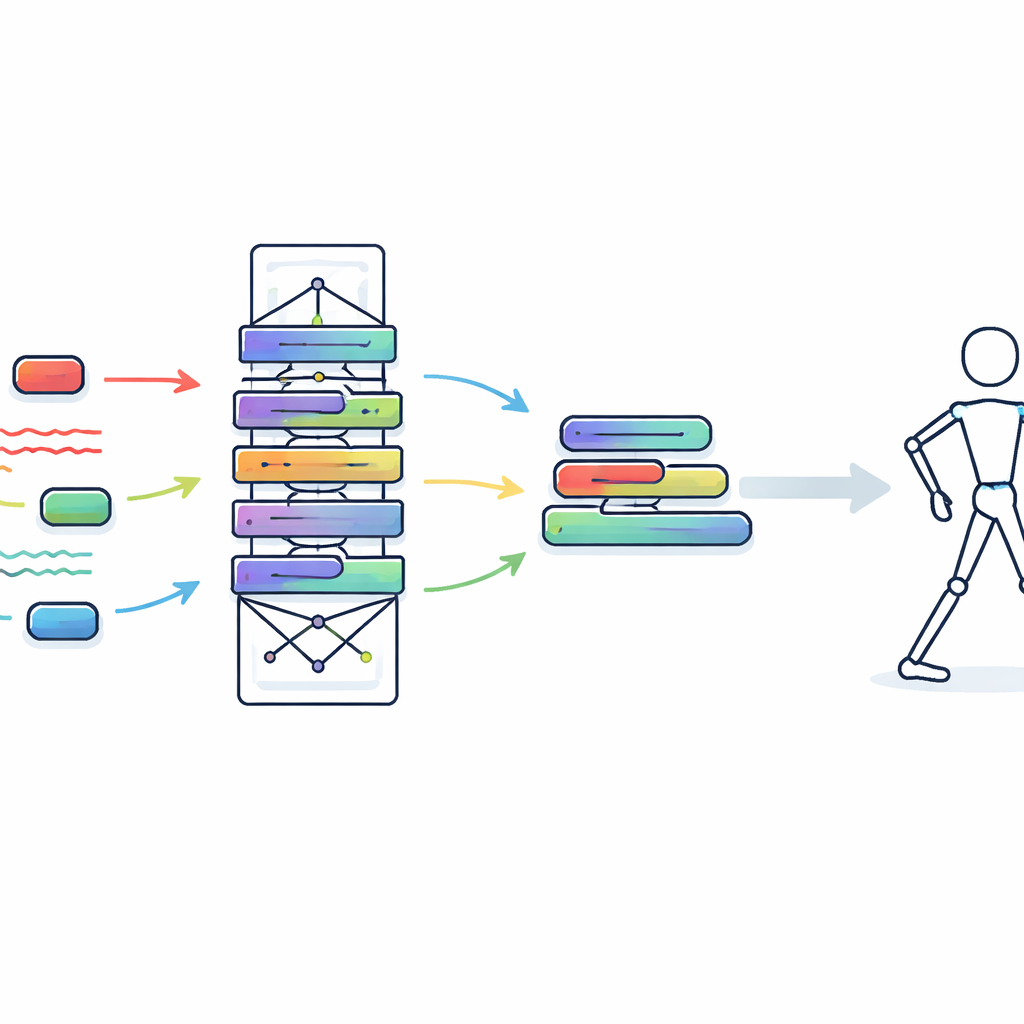
يقترح المؤلفون استراتيجية من خطوتين مستوحاة من طريقة تعلم الطالب من المدرّس. أثناء التدريب في المختبر، يستخدمون نموذج Transformer كبير وقوي كـ «مدرّس» ليحلل بيانات الحساسات بعمق عبر الزمن وعبر مواقع الجسم. بالتوازي، يصممون نموذجًا «طالبًا» أصغر مبنيًا على عملية تُدعى involution، التي تستطيع التكيّف بمرونة مع الأنماط المحلية في البيانات بينما تستخدم عددًا أقل بكثير من المعاملات مقارنة بالالتفاف التقليدي. من خلال عملية تُعرف بتقطير المعرفة، لا يكتفي الطالب بمطابقة مخرجات الوضعية النهائية؛ بل يُوجَّه أيضًا لمحاكاة أنماط الميزات الداخلية للمدرّس. بهذه الطريقة، يكتسب الطالب تدريجيًا حيلًا عالية المستوى لقراءة الحركة من الحساسات دون حاجة إلى حجم وتعقيد المدرّس عند النشر.
تحويل شبكة تدريب إلى محرك وقت تشغيل صغير
لجعل نموذج الطالب ملائمًا حقًا للأجهزة القابلة للارتداء، يتقدم الباحثون خطوة أخرى بإجراء يُدعى إعادة الباراميترية الهيكلية. أثناء التدريب، يتضمن كتلة الطالب عدة فروع وخطوات تطبيع ونوى متكيّفة لتعظيم مرونة التعلم. قبل النشر، تُدمج كل هذه الأجزاء رياضيًا في حساب واحد مبسط يتصرّف مثل اثنين من الالتفافات أحادية البعد البسيطة. تحافظ هذه عملية الطي على سلوك النموذج لكنها تقضي على الطبقات والعمليات الإضافية. وبما أن الالتفاف القياسي محسن بشكل كبير على الأجهزة الحديثة، فإن هذا التحول يقلص بشكل كبير الوقت والطاقة المطلوبين لمعالجة كل إطار، دون التضحية بما تعلمته الشبكة.
إلى أي مدى يعمل ذلك عمليًا؟
يقيم الفريق نهجهما على مجموعتي بيانات حركة عامتين، DIP-IMU وIMUPoser، اللتين تحتويان على ملايين الإطارات لأشخاص يؤدون أنشطة يومية ورياضية، تم التقاطها متزامنًا باستخدام IMUs وأنظمة التقاط حركة عالية الدقة. يطابق نموذجهم الخفيف أو يكاد يُطابق أفضل الطرق القائمة في متوسط خطأ المفصل—81 ملم على DIP-IMU و94 ملم على IMUPoser، ضمن حوالي 1% من أقوى الأساليب المقارنة. في الوقت نفسه، يعمل بسرعة أكبر بمقدار درجة إلى درجتين من الحجم: يُعالَج كل إطار في نحو 0.011–0.012 مللي ثانية، مقارنةً بعدة أجزاء من مللي ثانية إلى قرابة مللي ثانية كاملة للأنظمة المنافسة. تترجم هذه السرعة إلى عشرات الآلاف من الإطارات في الثانية على GPU، ما يفوق بكثير ما تحتاجه أي جهاز قابل للارتداء فعليًا، مما يترك مساحة كبيرة لتوفير البطارية ومهام أخرى على الجهاز.
ماذا يعني هذا للأجهزة القابلة للارتداء اليومية
لغير المتخصصين، الخلاصة هي أن المؤلفين وجدوا وسيلة لفصل «التفكير العميق» عن «التصرف السريع». يمكن للنموذج الكبير أن يفكر بعمق أثناء التدريب لفهم حركة الإنسان بتفصيل غني، بينما يتولى نموذج أصغر بكثير—مُعلَّم بعناية ثم مُبسّط—العمل في الزمن الحقيقي على سوار معصمك، أو سماعتك، أو دعامة إعادة التأهيل. النتيجة هي تتبع للجسم يكاد يكون دقيقًا كأنظمة المختبر الثقيلة لكنه نحيف بما يكفي للأجهزة منخفضة الطاقة التي تعمل دائمًا. يفتح هذا الباب أمام أجهزة قابلة للارتداء قادرة على تقديم تغذية راجعة فورية أثناء التمرين، أو التحذير من حركات غير آمنة في العمل، أو جعل العوالم الافتراضية تتفاعل مع أجسامنا بشكل أكثر طبيعية، وكل ذلك دون أجهزة ضخمة أو استنزاف سريع للبطارية.
الاستشهاد: Wang, L., Liu, J., Xue, J. et al. Human-centered design-based lightweight wearable IMU human pose estimation. Sci Rep 16, 11420 (2026). https://doi.org/10.1038/s41598-026-41004-5
الكلمات المفتاحية: أجهزة استشعار قابلة للارتداء, تقدير وضعية الإنسان, وحدات قياس惯ية, شبكات عصبية خفيفة, تتبع الحركة في الزمن الحقيقي