Clear Sky Science · nl
Op mensgerichte ontwerp gebaseerde lichtgewicht draagbare IMU-schatting van menselijke houding
Waarom snellere lichaamsregistratie ertoe doet
Van fysiotherapiepraktijken tot virtualreality-headsets: veel nieuwe technologieën zijn afhankelijk van het real-time begrijpen van hoe ons lichaam beweegt. Vandaag de dag gaat dat vaak gepaard met camera’s, markers of logge computers die lastig de hele dag te dragen zijn. Deze studie onderzoekt hoe kleine bewegingssensoren, vergelijkbaar met die in smartphones en smartwatches, gecombineerd met slimme algoritmen kunnen worden gebruikt om vrijwel onmiddellijk een volledige lichaamshouding te schatten met zeer weinig energieverbruik. Het doel is eenvoudig: bewegingsregistratie nauwkeurig genoeg maken voor serieus gebruik, maar licht en efficiënt genoeg om in alledaagse draagbare apparaten te verdwijnen.
Kleine sensoren, grote bewegingen
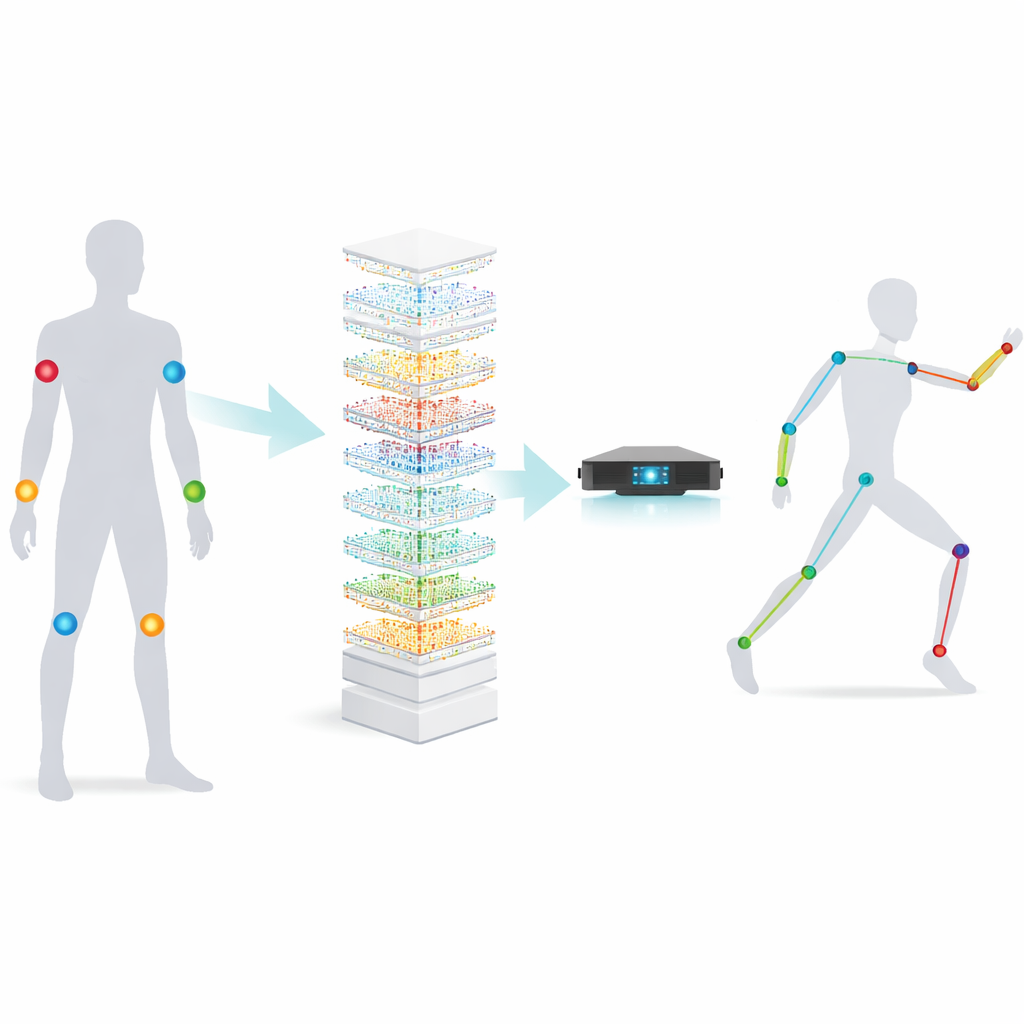
Het werk richt zich op inertiële meetsensoren, of IMU’s—doosjes ter grootte van een luciferdoosje die versnelling en rotatie meten. Geplaatst op een paar sleutelposities op het lichaam, kunnen IMU’s voelen hoe we bewegen, zelfs wanneer camera’s ons niet kunnen zien, bijvoorbeeld in drukke ruimtes of ’s nachts buiten. De uitdaging is dat het omzetten van deze ruwe sensorgegevens naar een gedetailleerde 3D-lichaamshouding een complex puzzelstuk is: het apparaat heeft slechts een handvol signalen, maar moet de posities van veel gewrichten afleiden, bij veel verschillende mensen en handelingen. Eerdere methoden gebruikten grote neurale netwerken, zoals diepe recurrente netwerken en Transformers, die nauwkeurig maar zwaar zijn—ze vergen veel geheugen, energie en tijd, waardoor ze ongeschikt zijn voor kleine draagbare apparaten.
Een klein model leren denken als een groot model
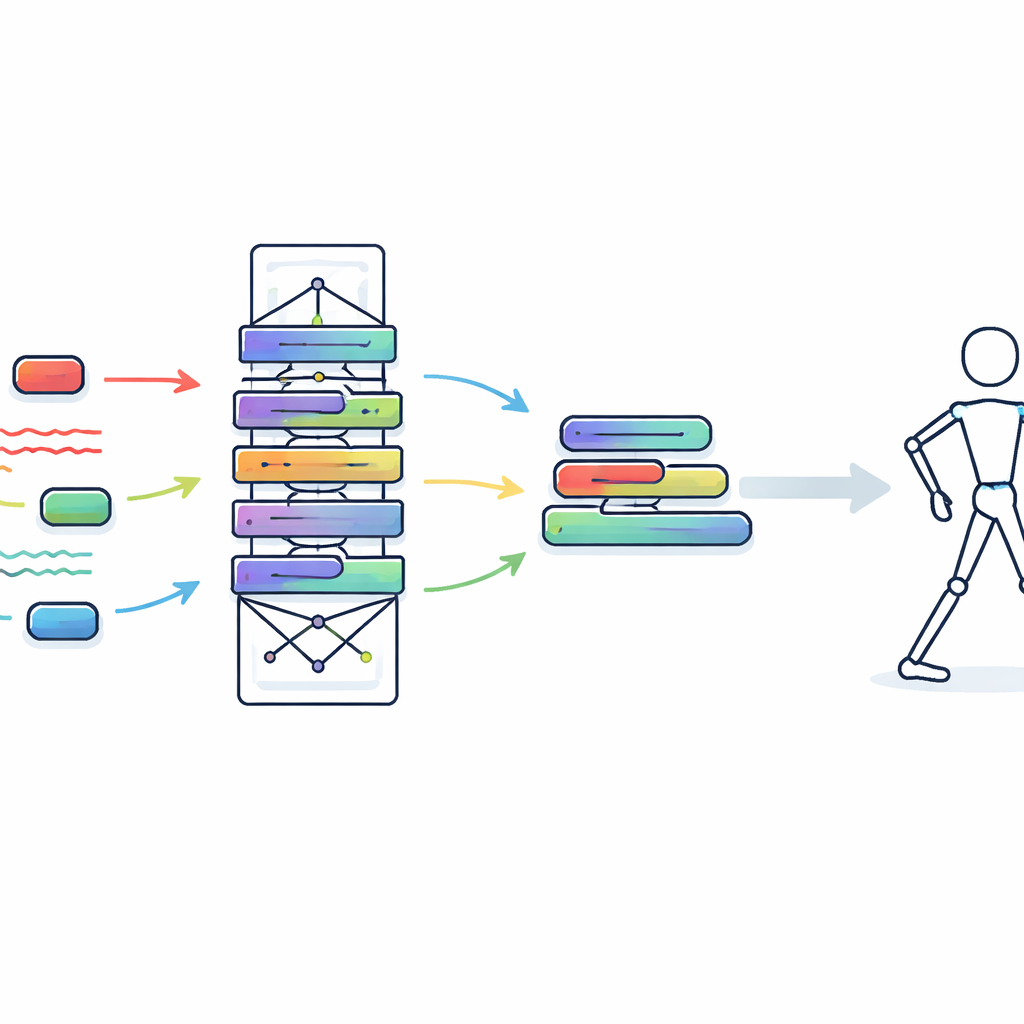
De auteurs stellen een tweestapsstrategie voor, geïnspireerd op hoe een leerling van een leraar leert. Tijdens het trainen in het lab gebruiken ze een groot, krachtig Transformer-model als de “leraar” om de sensorgegevens diepgaand in de tijd en over lichaamslocaties te analyseren. Parallel daaraan ontwerpen ze een kleiner “leerling”-model gebouwd rond een bewerking die involution heet, die zich flexibel kan aanpassen aan lokale patronen in de gegevens terwijl het veel minder parameters gebruikt dan standaardconvoluties. Via een proces dat kennisdistillatie wordt genoemd, probeert de leerling niet alleen de uiteindelijke houdingsuitgangen te evenaren; hij wordt ook aangemoedigd om de interne featurepatronen van de leraar te imiteren. Op deze manier pikt de leerling geleidelijk hoge-niveau trucs op om beweging uit sensoren te lezen zonder bij inzet de omvang en complexiteit van de leraar te hoeven hebben.
Een trainingsnetwerk omzetten in een tiny runtime-engine
Om het leerlingmodel echt draagbaar-vriendelijk te maken, gaan de onderzoekers nog een stap verder met een procedure genaamd structurele herparameterisatie. Tijdens training bevat het leerlingblok meerdere takken, normalisatiestappen en adaptieve kernels om de leerflexibiliteit te maximaliseren. Voor inzet worden al deze onderdelen wiskundig samengevoegd tot één gestroomlijnde berekening die zich gedraagt als twee eenvoudige eendimensionale convoluties. Dit vouwproces behoudt het gedrag van het model maar elimineert extra lagen en bewerkingen. Omdat standaardconvolutie zwaar geoptimaliseerd is op moderne hardware, vermindert deze transformatie drastisch de tijd en energie om elk frame te verwerken, zonder in te leveren op wat het netwerk geleerd heeft.
Hoe goed werkt het in de praktijk?
Het team evalueert hun aanpak op twee openbare bewegingsdatasets, DIP-IMU en IMUPoser, die miljoenen frames bevatten van mensen die alledaagse en atletische activiteiten uitvoeren, vastgelegd met IMU’s en hoge-precisie motion-capture-systemen. Hun lichtgewicht model evenaart of komt bijna overeen met de beste bestaande methoden qua gemiddelde gewrichtsfout—81 millimeter op DIP-IMU en 94 millimeter op IMUPoser, binnen ongeveer 1% van de sterkste referenties. Tegelijkertijd draait het één tot twee orde groottes sneller: elk frame wordt verwerkt in ongeveer 0,011–0,012 milliseconden, vergeleken met enkele tienden van een milliseconde tot bijna een hele milliseconde voor concurrerende systemen. Deze snelheid vertaalt zich naar tienduizenden frames per seconde op een GPU, veel meer dan een draagbaar apparaat daadwerkelijk nodig heeft, wat ruimte laat voor energiebesparing en andere taken op het apparaat.
Wat dit betekent voor alledaagse wearables
Voor niet-specialisten is de belangrijkste conclusie dat de auteurs een manier hebben gevonden om “zwaar nadenken” te scheiden van “snel handelen”. Een groot model kan tijdens training diep nadenken om menselijke beweging in rijke details te begrijpen, terwijl een veel kleiner model—zorgvuldig geleerd en vervolgens vereenvoudigd—het realtime werk uitvoert op je polsband, headset of rehabilitatiebrace. Het resultaat is lichaamsregistratie die bijna even nauwkeurig is als zware labsystemen maar slank genoeg voor energiezuinige, altijd-aan apparaten. Dit effent de weg voor draagbare apparaten die tijdige feedback kunnen geven tijdens het sporten, waarschuwen voor onveilige bewegingen op de werkvloer of virtuele werelden natuurlijker op ons lichaam laten reageren, allemaal zonder logge hardware of snel batterijverbruik.
Bronvermelding: Wang, L., Liu, J., Xue, J. et al. Human-centered design-based lightweight wearable IMU human pose estimation. Sci Rep 16, 11420 (2026). https://doi.org/10.1038/s41598-026-41004-5
Trefwoorden: draagbare sensoren, schatting van lichaamshouding, inertiële meetsensoren, lichtgewicht neurale netwerken, realtime bewegingsregistratie