Clear Sky Science · es
Estimación de postura humana basada en IMU portátil y ligera centrada en el usuario
Por qué importa un rastreo corporal más rápido
Desde clínicas de fisioterapia hasta cascos de realidad virtual, muchas tecnologías nuevas dependen de comprender cómo se mueve nuestro cuerpo en tiempo real. Hoy en día esto suele requerir cámaras, marcadores o equipos voluminosos que resultan incómodos para llevar todo el día. Este estudio explora cómo pequeños sensores de movimiento, similares a los de teléfonos y relojes inteligentes, pueden combinarse con algoritmos inteligentes para estimar la postura corporal completa casi al instante, consumiendo muy poca energía. El objetivo es sencillo: lograr un seguimiento de movimiento lo bastante preciso para uso serio, pero lo bastante ligero y eficiente como para integrarse en dispositivos portátiles cotidianos.
Pequeños sensores, grandes movimientos
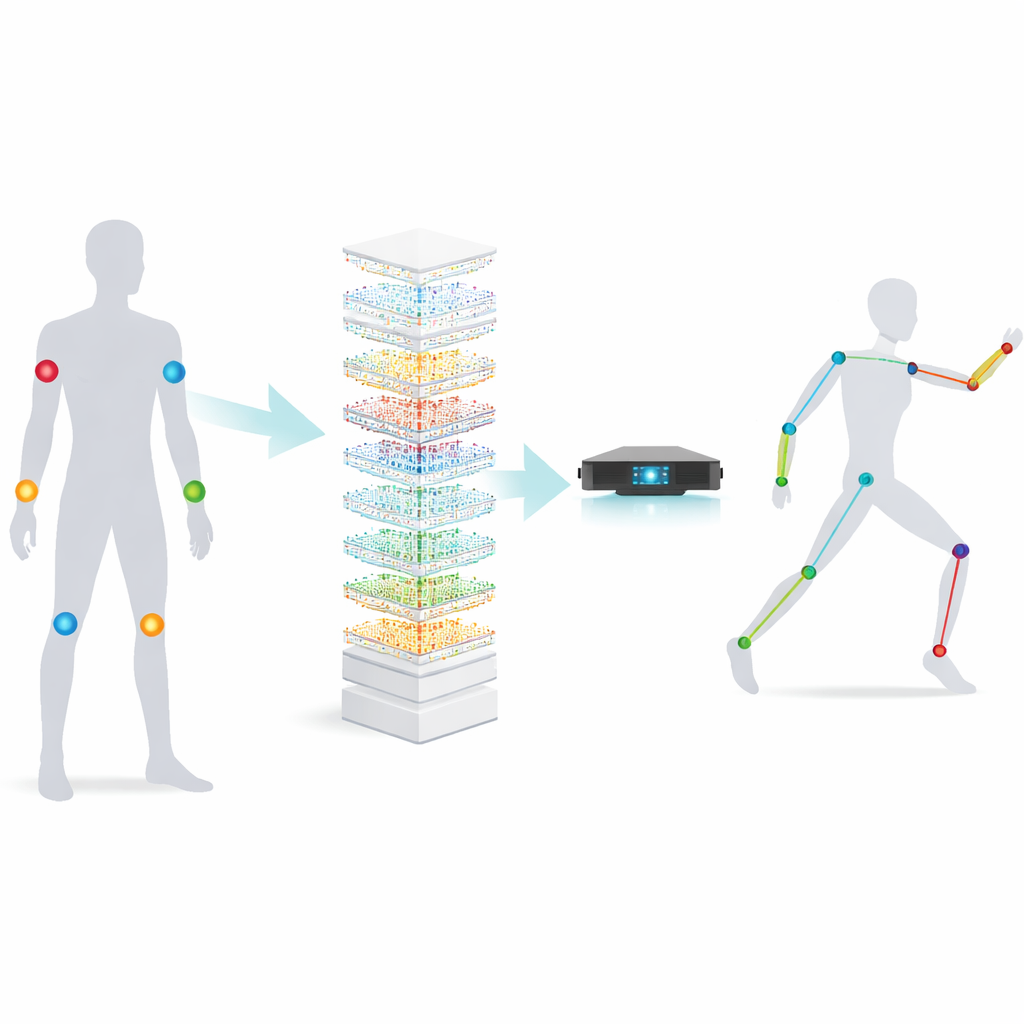
El trabajo se centra en las unidades de medida inercial, o IMU: dispositivos del tamaño de una cajetilla que miden aceleración y rotación. Colocadas en unas pocas ubicaciones clave del cuerpo, las IMU pueden detectar cómo nos movemos incluso cuando las cámaras no nos ven, por ejemplo en habitaciones concurridas o al aire libre por la noche. El desafío es convertir estas lecturas de los sensores en una postura corporal 3D detallada: el dispositivo ofrece sólo un puñado de señales, pero debe inferir las posiciones de muchas articulaciones, en muchas personas diferentes realizando muchas acciones distintas. Métodos previos usaron redes neuronales grandes, como redes recurrentes profundas y Transformers, que son precisas pero pesadas: requieren mucha memoria, energía y tiempo, lo que las hace inadecuadas para pequeños dispositivos portátiles.
Enseñar a un modelo pequeño a pensar como uno grande
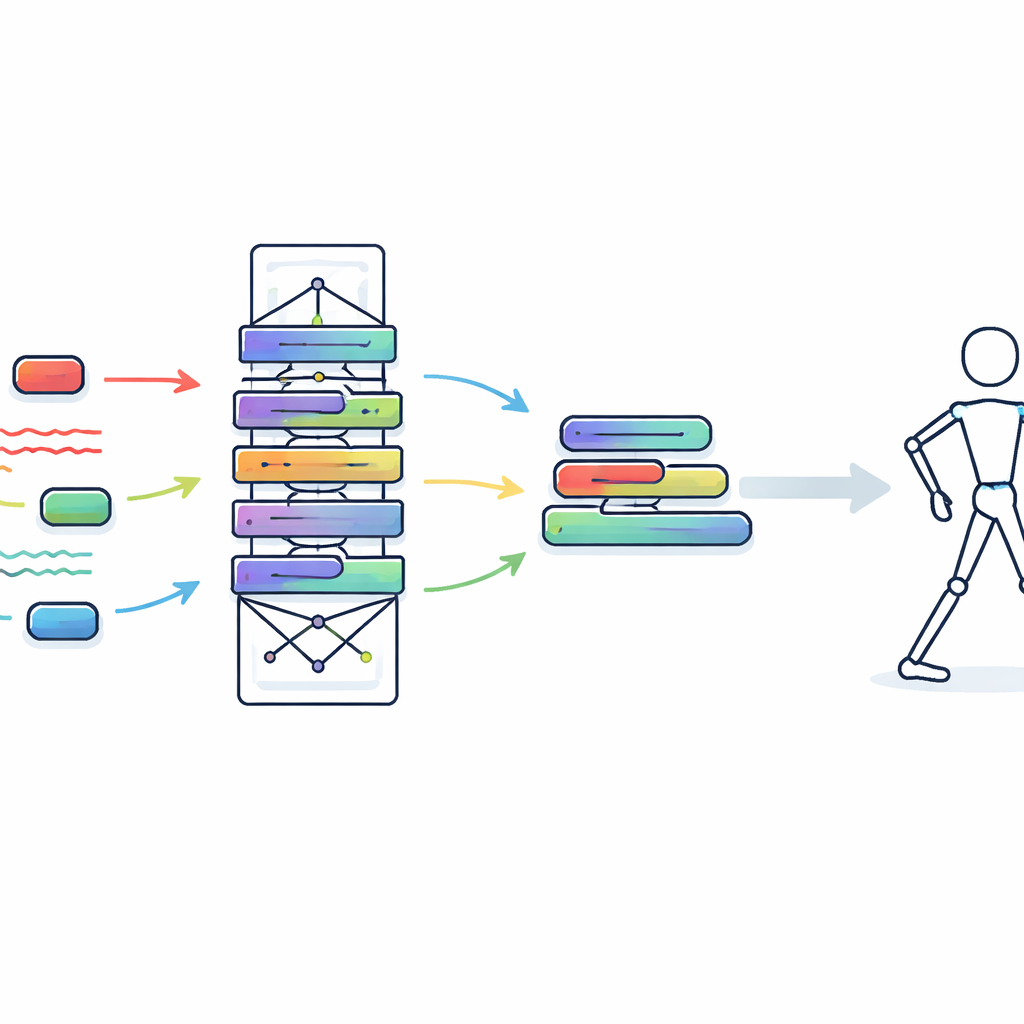
Los autores proponen una estrategia en dos pasos inspirada en cómo un estudiante aprende de un profesor. Durante el entrenamiento en laboratorio usan un modelo Transformer grande y potente como “profesor” para analizar profundamente los datos de los sensores a lo largo del tiempo y entre ubicaciones del cuerpo. En paralelo diseñan un modelo “estudiante” más pequeño construido a partir de una operación llamada involución, que puede adaptarse de forma flexible a patrones locales en los datos usando muchos menos parámetros que la convolución estándar. Mediante un proceso conocido como destilación de conocimiento, el estudiante no solo iguala las salidas finales de postura; también se le empuja a imitar los patrones de características internos del profesor. Así, el estudiante va adquiriendo estrategias de alto nivel para leer el movimiento desde los sensores sin necesitar el tamaño y la complejidad del profesor una vez desplegado.
Convertir una red de entrenamiento en un motor de ejecución diminuto
Para que el modelo estudiante sea realmente apto para llevar, los investigadores dan un paso adicional con un procedimiento llamado reparametrización estructural. Durante el entrenamiento, el bloque estudiante incluye varias ramas, pasos de normalización y núcleos adaptativos para maximizar la flexibilidad del aprendizaje. Antes del despliegue, todas estas piezas se fusionan matemáticamente en un único cálculo depurado que se comporta como dos convoluciones unidimensionales sencillas. Este plegado preserva el comportamiento del modelo pero elimina capas y operaciones extra. Dado que la convolución estándar está muy optimizada en el hardware moderno, esta transformación reduce drásticamente el tiempo y la energía necesarios para procesar cada fotograma, sin sacrificar lo aprendido por la red.
¿Qué tan bien funciona en la práctica?
El equipo evalúa su enfoque en dos conjuntos de datos públicos de movimiento, DIP-IMU e IMUPoser, que contienen millones de fotogramas de personas realizando actividades cotidianas y atléticas, capturados simultáneamente con IMU y sistemas de captura de movimiento de alta precisión. Su modelo ligero iguala o se aproxima a los mejores métodos existentes en error medio por articulación: 81 milímetros en DIP-IMU y 94 milímetros en IMUPoser, dentro de aproximadamente un 1% de las mejores referencias. Al mismo tiempo, funciona entre una y dos órdenes de magnitud más rápido: cada fotograma se procesa en aproximadamente 0,011–0,012 milisegundos, frente a varias décimas de milisegundo hasta casi un milisegundo de los sistemas competidores. Esta velocidad se traduce en decenas de miles de fotogramas por segundo en una GPU, muy por encima de lo que realmente necesita cualquier dispositivo portátil, dejando amplio margen para el ahorro de batería y otras tareas en el dispositivo.
Qué implica esto para los dispositivos portátiles cotidianos
Para el público general, la conclusión clave es que los autores han encontrado una manera de separar “pensar intensamente” de “actuar rápido”. Un modelo grande puede pensar intensamente durante el entrenamiento para comprender el movimiento humano en detalle, mientras que un modelo mucho más pequeño—cuidadosamente enseñado y luego simplificado—se encarga del trabajo en tiempo real en tu pulsera, casco o férula de rehabilitación. El resultado es un seguimiento corporal casi tan preciso como los sistemas pesados de laboratorio pero lo bastante esbelto para dispositivos de bajo consumo y siempre activos. Esto allana el camino para wearables que puedan dar retroalimentación oportuna durante el ejercicio, advertir sobre movimientos inseguros en el trabajo o hacer que los mundos virtuales respondan de forma más natural a nuestros cuerpos, todo ello sin hardware voluminoso ni drenaje rápido de la batería.
Cita: Wang, L., Liu, J., Xue, J. et al. Human-centered design-based lightweight wearable IMU human pose estimation. Sci Rep 16, 11420 (2026). https://doi.org/10.1038/s41598-026-41004-5
Palabras clave: sensores portátiles, estimación de la postura humana, unidades de medida inercial, redes neuronales ligeras, seguimiento de movimiento en tiempo real