Clear Sky Science · fr
Estimation de pose humaine légère basée sur la conception centrée sur l’humain et des IMU portables
Pourquoi un suivi corporel plus rapide est important
Des cabinets de kinésithérapie aux casques de réalité virtuelle, de nombreuses technologies modernes reposent sur la compréhension des mouvements du corps en temps réel. Aujourd’hui, cela nécessite souvent des caméras, des marqueurs ou des ordinateurs encombrants difficiles à porter toute la journée. Cette étude explore comment de petits capteurs de mouvement, similaires à ceux des smartphones et des montres connectées, peuvent être combinés à des algorithmes ingénieux pour estimer presque instantanément la pose du corps entier, en utilisant très peu d’énergie. L’objectif est simple : rendre le suivi des mouvements suffisamment précis pour des usages sérieux, tout en le rendant suffisamment léger et efficace pour disparaître dans des objets portables du quotidien.
Petits capteurs, grands mouvements
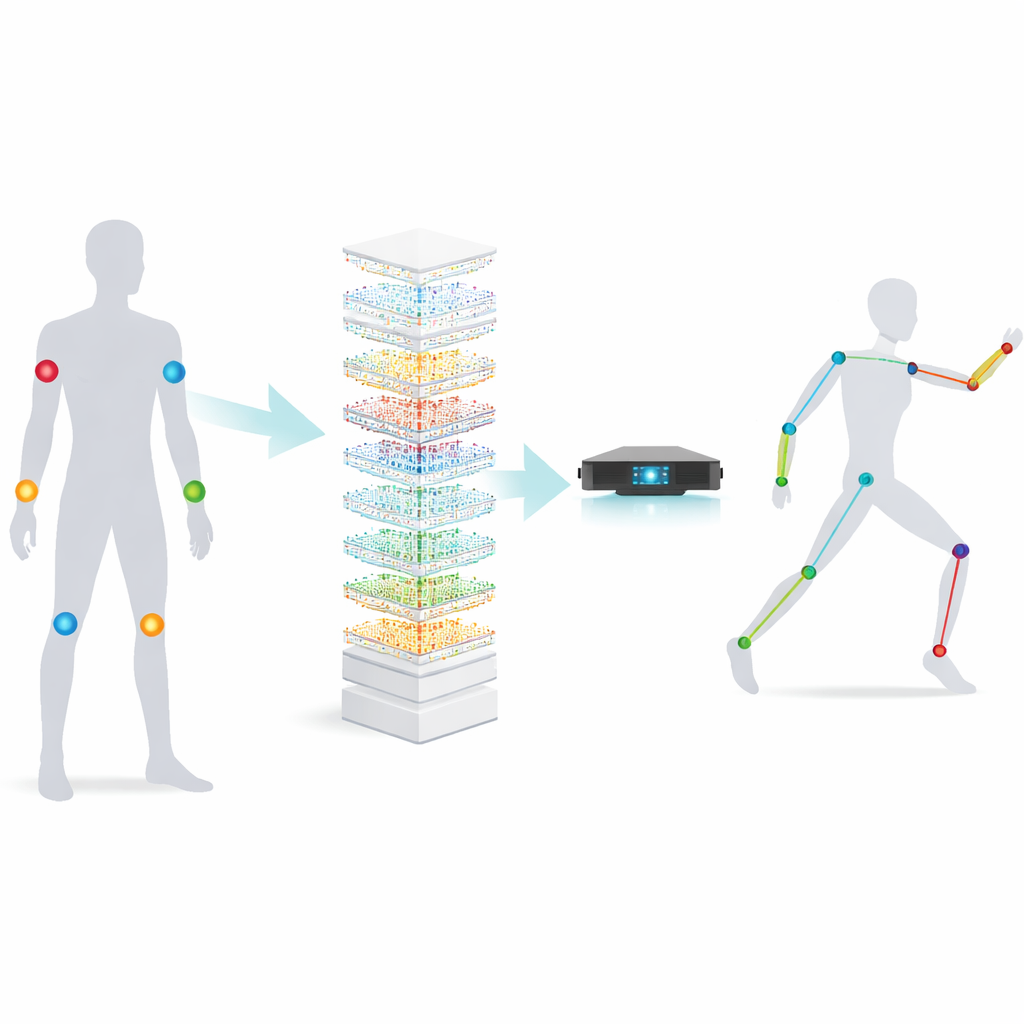
Le travail se concentre sur les unités de mesure inertielle, ou IMU — des dispositifs de la taille d’une boîte d’allumettes qui mesurent l’accélération et la rotation. Placées à quelques emplacements clés du corps, les IMU peuvent détecter nos mouvements même lorsque les caméras ne peuvent pas nous voir, par exemple dans des pièces bondées ou à l’extérieur la nuit. Le défi est que transformer ces mesures brutes en une pose 3D détaillée est un casse-tête complexe : l’appareil ne fournit qu’un petit nombre de signaux, et pourtant il doit déduire les positions de nombreux articulations, chez des personnes différentes, effectuant des actions variées. Les méthodes précédentes utilisaient de grands réseaux neuronaux, comme des réseaux récurrents profonds et des Transformers, qui sont précis mais lourds — ils demandent beaucoup de mémoire, d’énergie et de temps, et sont mal adaptés aux petits dispositifs portables.
Apprendre à un petit modèle à penser comme un grand
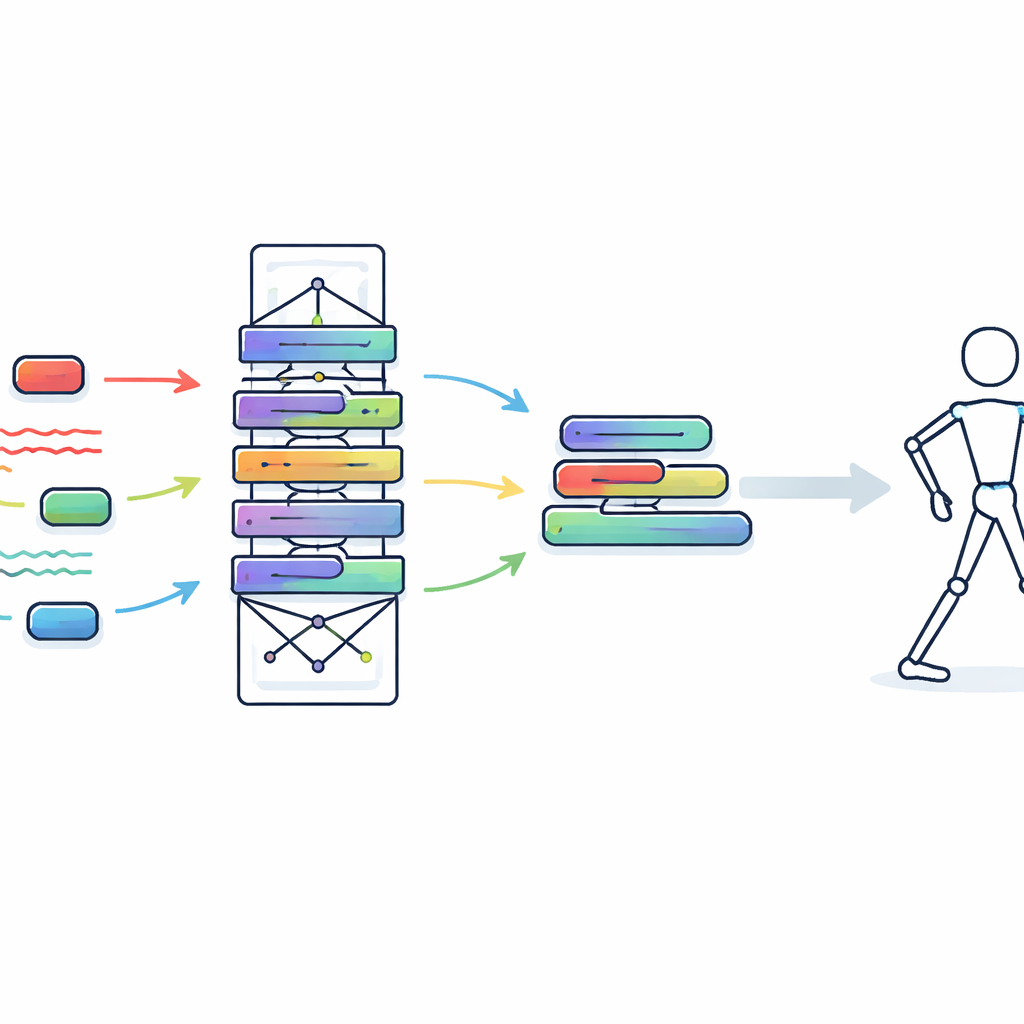
Les auteurs proposent une stratégie en deux étapes inspirée de la relation élève‑enseignant. Pendant l’entraînement en laboratoire, ils utilisent un grand modèle Transformer puissant comme « enseignant » pour analyser en profondeur les données des capteurs au fil du temps et à travers les emplacements corporels. En parallèle, ils conçoivent un plus petit modèle « élève » basé sur une opération appelée involution, capable de s’adapter de façon flexible aux motifs locaux des données tout en utilisant beaucoup moins de paramètres que la convolution standard. Par un procédé connu sous le nom de distillation des connaissances, l’élève ne se contente pas d’atteindre les mêmes sorties de pose finales ; il est également encouragé à imiter les schémas de caractéristiques internes de l’enseignant. De cette manière, l’élève intègre progressivement des astuces de haut niveau pour lire le mouvement à partir des capteurs sans nécessiter la taille et la complexité de l’enseignant au moment du déploiement.
Transformer un réseau d’entraînement en un moteur d’exécution minuscule
Pour rendre le modèle élève vraiment adapté au portage, les chercheurs vont plus loin avec une procédure appelée re-paramétrisation structurelle. Pendant l’entraînement, le bloc élève inclut plusieurs branches, des étapes de normalisation et des noyaux adaptatifs pour maximiser la flexibilité d’apprentissage. Avant le déploiement, tous ces éléments sont mathématiquement fusionnés en un seul calcul rationalisé qui se comporte comme deux simples convolutions unidimensionnelles. Ce processus de pliage préserve le comportement du modèle mais élimine les couches et opérations supplémentaires. Parce que la convolution standard est fortement optimisée sur le matériel moderne, cette transformation réduit drastiquement le temps et l’énergie nécessaires pour traiter chaque image, sans sacrifier ce que le réseau a appris.
Quelle est l’efficacité en pratique ?
L’équipe évalue son approche sur deux jeux de données publics de mouvement, DIP-IMU et IMUPoser, qui contiennent des millions d’images de personnes réalisant des activités quotidiennes et sportives, capturées simultanément avec des IMU et des systèmes de capture de mouvement de haute précision. Leur modèle léger atteint ou se rapproche des meilleures méthodes existantes en erreur moyenne sur les articulations — 81 millimètres sur DIP-IMU et 94 millimètres sur IMUPoser, soit à environ 1 % des meilleures références. En parallèle, il fonctionne un à deux ordres de grandeur plus vite : chaque image est traitée en environ 0,011–0,012 millisecondes, contre plusieurs dixièmes de milliseconde jusqu’à près d’une milliseconde pour les systèmes concurrents. Cette rapidité se traduit par des dizaines de milliers d’images par seconde sur GPU, bien au‑delà de ce dont n’importe quel appareil portable a réellement besoin, laissant une large marge pour économiser la batterie et pour d’autres tâches locales.
Ce que cela signifie pour les objets portables du quotidien
Pour les non‑spécialistes, l’essentiel est que les auteurs ont trouvé un moyen de séparer « réfléchir intensément » et « agir rapidement ». Un grand modèle peut réfléchir intensément pendant l’entraînement pour comprendre le mouvement humain en détail, tandis qu’un modèle beaucoup plus petit — soigneusement enseigné puis simplifié — gère le travail en temps réel sur votre bracelet, casque ou attelle de rééducation. Le résultat est un suivi du corps presque aussi précis que les systèmes de laboratoire lourds mais suffisamment léger pour des dispositifs à faible consommation, toujours activés. Cela ouvre la voie à des wearables capables de fournir des retours opportun pendant l’exercice, d’alerter sur des mouvements à risque au travail, ou de rendre les mondes virtuels plus sensibles à nos corps, le tout sans matériel encombrant ni consommation excessive de batterie.
Citation: Wang, L., Liu, J., Xue, J. et al. Human-centered design-based lightweight wearable IMU human pose estimation. Sci Rep 16, 11420 (2026). https://doi.org/10.1038/s41598-026-41004-5
Mots-clés: capteurs portables, estimation de la pose humaine, unités de mesure inertielle, réseaux neuronaux légers, suivi de mouvement en temps réel