Clear Sky Science · sv
Mänskligt centrerad designbaserad lättvikts bärbar IMU-uppskattning av kroppsställning
Varför snabbare kroppsspårning spelar roll
Från fysioterapikliniker till virtuella verklighetsheadset förlitar sig många nya tekniker på att förstå hur våra kroppar rör sig i realtid. Idag kräver detta ofta kameror, markörer eller skrymmande datorer som är svåra att bära hela dagen. Denna studie undersöker hur små rörelsesensorer, liknande de i smartphones och smartklockor, kan kombineras med smarta algoritmer för att uppskatta helkroppsställning nästan omedelbart med mycket låg energiförbrukning. Målet är enkelt: göra rörelsespårning tillräckligt noggrann för seriöst bruk, men tillräckligt lätt och effektiv för att försvinna in i vardagliga bärbara enheter.
Små sensorer, stora rörelser
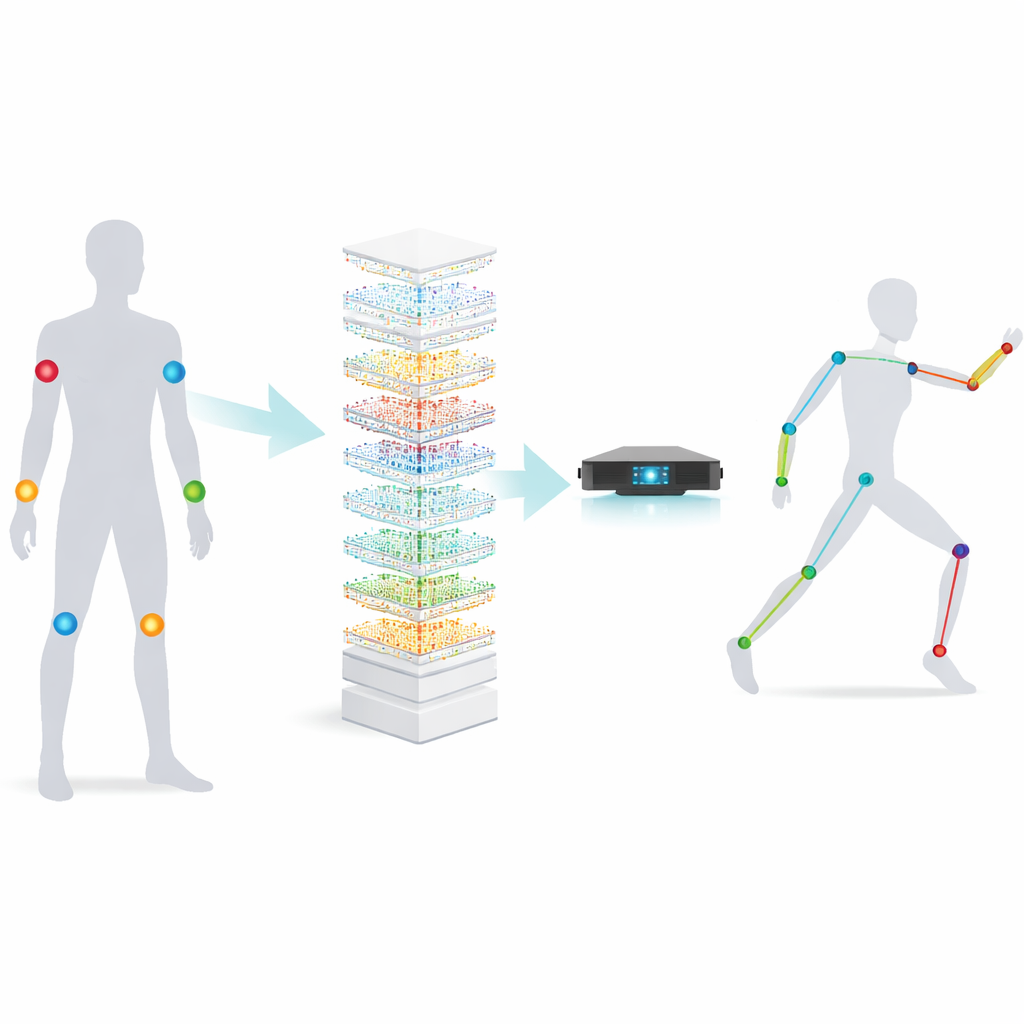
Arbetet fokuserar på inertiala mätenheter, eller IMU:er — tändsticksask-stora enheter som mäter acceleration och rotation. När de placeras på ett fåtal nyckelställen på kroppen kan IMU:er känna av hur vi rör oss även när kameror inte ser oss, till exempel i trånga rum eller utomhus på natten. Utmaningen är att omvandla dessa råa sensorvärden till en detaljerad 3D-kroppsställning: enheten har bara en handfull signaler, men måste härleda positionerna för många leder, för många olika människor och handlingar. Tidigare metoder använde stora neurala nätverk, som djupa återkommande nätverk och Transformers, vilka är noggranna men tunga — de kräver mycket minne, energi och tid, vilket gör dem olämpliga för små bärbara enheter.
Lära en liten modell att tänka som en stor
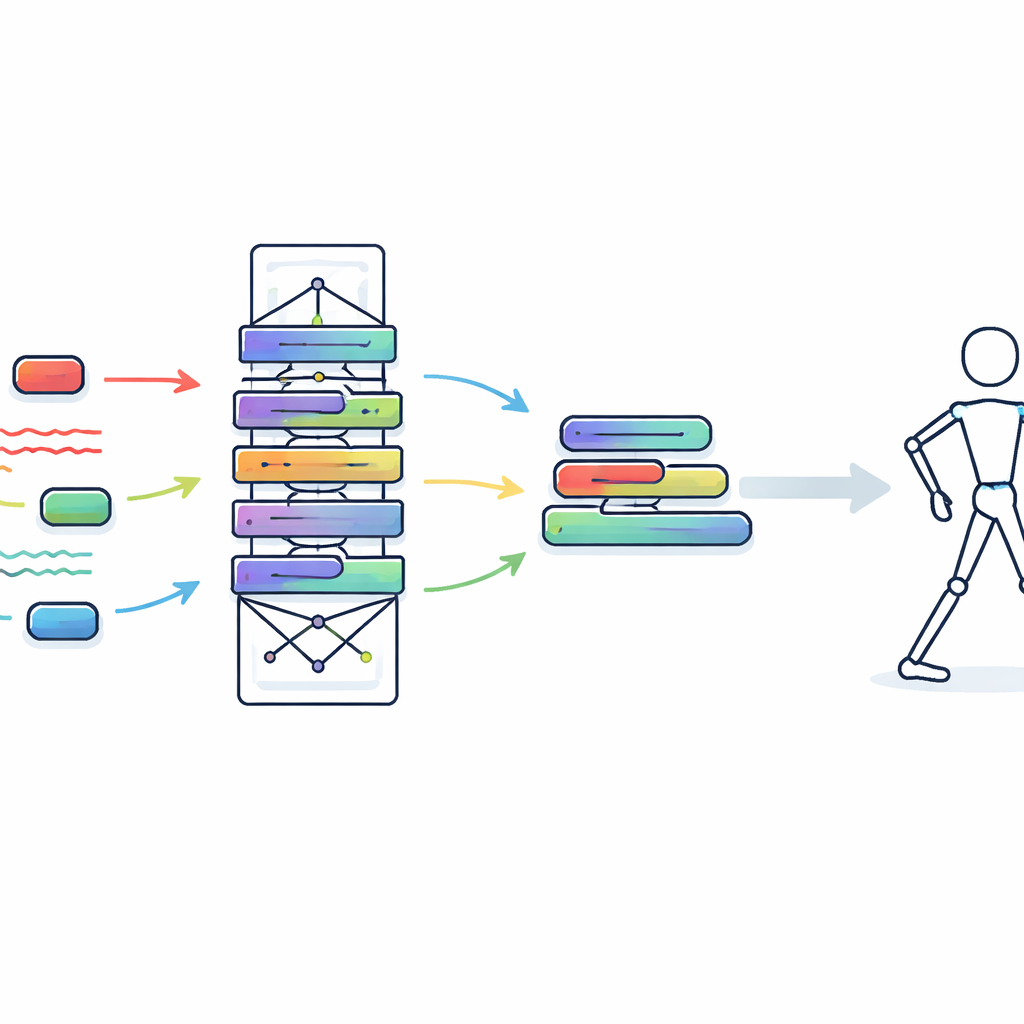
Författarna föreslår en tvåstegsstrategi inspirerad av hur en elev lär sig av en lärare. Under träning i labbet använder de en stor, kraftfull Transformer-modell som "lärare" för att djupt analysera sensordata över tid och över kroppens olika positioner. Parallellt utformar de en mindre "elev"-modell byggd kring en operation kallad involution, som flexibelt kan anpassa sig till lokala mönster i datan samtidigt som den använder betydligt färre parametrar än standardkonvolution. Genom en process känd som knowledge distillation får eleven inte bara matcha de slutliga poserna; den uppmuntras också att efterlikna lärarens interna feature-mönster. På så sätt plockar eleven gradvis upp högre nivåers knep för att läsa rörelse från sensorer utan att behöva lärarens storlek och komplexitet när den väl distribueras.
Göra ett träningsnätverk till en liten körbar motor
För att göra elevmodellen verkligen lämplig för bärbara enheter går forskarna ett steg längre med en procedur kallad strukturell re-parametrisiering. Under träning innehåller elevblocket flera grenar, normaliseringssteg och adaptiva kärnor för att maximera inlärningsflexibiliteten. Innan distribution slås alla dessa delar matematiskt ihop till en enda strömlinjeformad beräkning som beter sig som två enkla en-dimensionella konvolutioner. Denna hopfällningsprocess bevarar modellens beteende men eliminerar extra lager och operationer. Eftersom standardkonvolution är hårt optimerad på modern hårdvara minskar denna transformation drastiskt tiden och energin som krävs för att bearbeta varje bildruta, utan att offra vad nätverket lärt sig.
Hur bra fungerar det i praktiken?
Teamet utvärderar sin metod på två publika rörelsedataset, DIP-IMU och IMUPoser, vilka innehåller miljoner bildrutor av personer som utför vardags- och idrottsaktiviteter, fångade samtidigt med IMU:er och högprecisions rörelsefångstsystem. Deras lättviktsmodell matchar eller kommer nära de bästa befintliga metoderna vad gäller genomsnittligt ledavvikelse — 81 millimeter på DIP-IMU och 94 millimeter på IMUPoser, inom ungefär 1 % av de starkaste referenserna. Samtidigt körs den en till två storleksordningar snabbare: varje bildruta bearbetas på cirka 0,011–0,012 millisekunder, jämfört med flera tiondels millisekunder upp till nästan en hel millisekund för konkurrerande system. Denna hastighet motsvarar tiotusentals bildrutor per sekund på en GPU, långt mer än vad någon bärbar enhet faktiskt behöver, vilket lämnar gott om utrymme för batteribesparing och andra uppgifter på enheten.
Vad detta innebär för vardagliga bärbara enheter
För icke-specialister är huvudpoängen att författarna har hittat ett sätt att separera "tänka hårt" från "agera snabbt." En stor modell kan tänka djupt under träning för att förstå människors rörelser i rik detalj, medan en mycket mindre modell — noggrant undervisad och sedan förenklad — sköter realtidsarbetet på ditt armband, headset eller rehabiliteringsortos. Resultatet är kroppsspårning som är nästan lika noggrann som tungviktiga labsystem men tillräckligt lätthanterlig för lågdrivna, alltid påslagna enheter. Detta banar väg för wearables som kan ge snabb återkoppling under träning, varna för osäkra rörelser på jobbet eller få virtuella världar att reagera mer naturligt på våra kroppar, allt utan skrymmande hårdvara eller snabb batterinedbrytning.
Citering: Wang, L., Liu, J., Xue, J. et al. Human-centered design-based lightweight wearable IMU human pose estimation. Sci Rep 16, 11420 (2026). https://doi.org/10.1038/s41598-026-41004-5
Nyckelord: bärbara sensorer, uppskattning av kroppsställning, inertiala mätenheter, lättvikts neurala nätverk, rörelsespårning i realtid