Clear Sky Science · tr
Ağ kontrollü sistemler için gözlemci tabanlı güvenli $$H_{\infty }$$ kontrolü: çoklu bozucu etkenler, aktüatör arızaları ve adaptif olay-tetiklemeli mekanizma altında aldatma saldırıları
Bağlı Makineleri Güvende ve Dengede Tutmak
Modern teknoloji, fabrika zeminlerindeki robot kollarından otonom insansız hava araçlarına ve akıllı enerji sistemlerine kadar her şeyi çalıştırmak için sensörler, bilgisayarlar ve motorlardan oluşan ağlara dayanır. Bu ağ kontrollü sistemler verimli ve esnek olabilir, ancak rastgele çevresel bozucu etkenler, aşınmış donanım ve hatta kasıtlı siber saldırılar tarafından kolayca dengeleri bozulabilir. Bu makale, aynı anda birden çok sorunla saldırıya uğrayan sistemleri bile kararlı ve güvenilir tutmanın yeni bir yolunu sunar ve aynı zamanda ağ üzerinden gönderilmesi gereken veri miktarını azaltır.
Ağlı Makineleri Korumak Neden Zordur
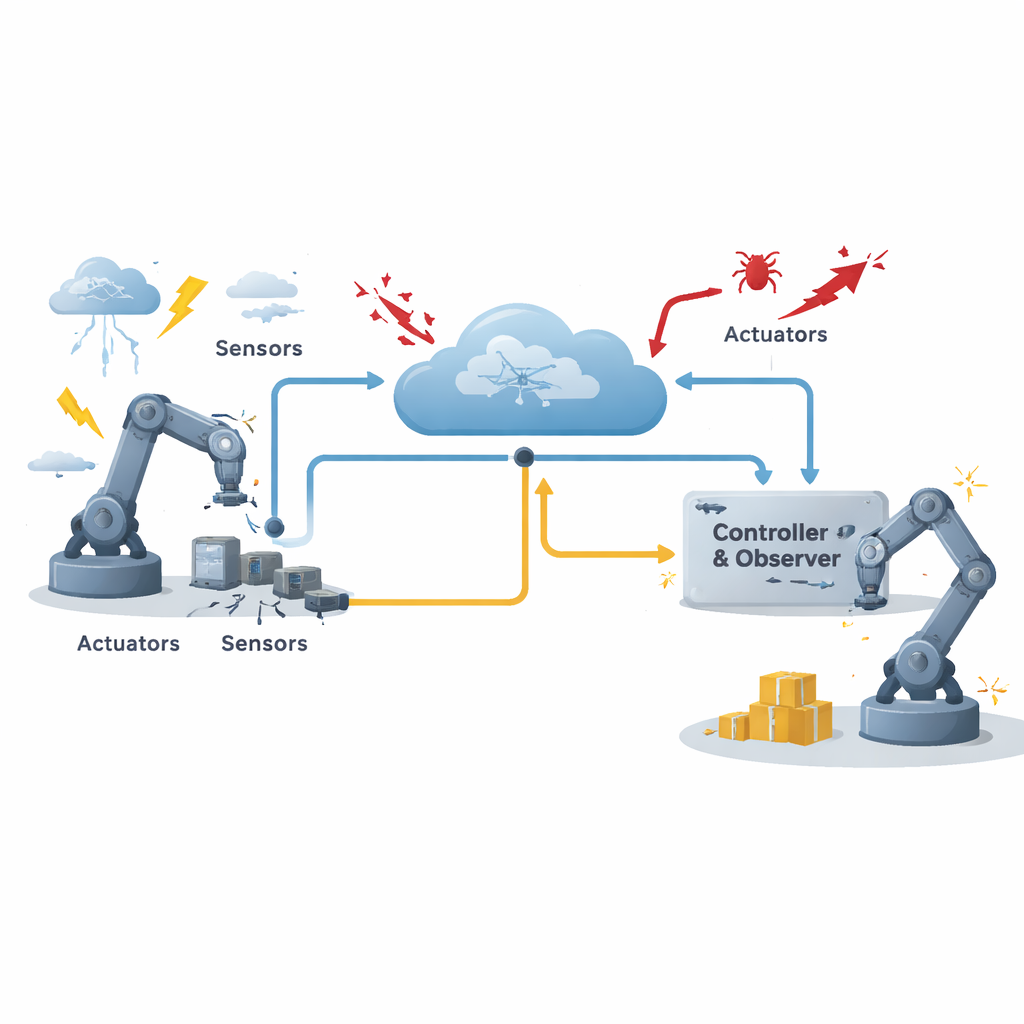
Tipik bir ağ kontrollü sistemde sensörler bir makinenin davranışını ölçer, bir denetleyici ne yapılması gerektiğini hesaplar ve aktüatörler kuvvet veya hareket uygular; bunların hepsi ortak bir iletişim ağı üzerinden bağlıdır. Bu düzenleme kablo, maliyet ve bakım işini azaltır, ancak yeni riskler getirir. Mesajlar gecikebilir veya kaybolabilir, cihazlar arızalanabilir ve kötü niyetli kişiler iletim halindeki verilerle oynayabilir. Yazarlar, denetleyicinin sisteme dair yanıltıcı bir görüntü görmek üzere sahte sinyallerin enjekte edildiği aldatma saldırısı (deception attack) adı verilen özellikle tehlikeli bir siber tehdide odaklanıyor. Aynı zamanda makine iki tür bozucu etkenle karşı karşıyadır: bazıları öngörülebilir titreşimler gibi kabaca modellenebilirken, diğerleri dağınık ve önceden tanımlaması zordur. Aktüatörler de yaşlanma veya aşırı yük nedeniyle kısmen veya tamamen arızalanabilir.
Gizli Bozucu Etkenleri Gerçek Zamanlı İzlemek
Bu belirsizliklerle başa çıkmak için araştırmacılar gözlemci adını verdikleri özel bir yazılım bileşeni tasarlıyor. Sadece doğrudan sensör okumalarına güvenmek yerine gözlemci, sistemin beklenen davranışını gerçek ölçümlerle karşılaştırarak gizli bozucu etkenleri yeniden oluşturur. Ardından gözlemlenen hareketin ne kadarının bilinen etkilerden, ne kadarının bilinmeyen kesintilerden kaynaklandığını tahmin eder. Bu tahmin denetleyiciye verilir ve denetleyici bozucu etkenlerin etkisini mümkün olduğunca gidermek için kullanır. Basitçe ifade etmek gerekirse, sistem kendi amaçlanan eylemlerini çevreden veya kötü niyetli müdahaleden gelen “gürültü”den ayırt etmeyi öğrenir ve sonra o gürültünün etkisine karşı aktif olarak koyar.
Önemli Olduğunda Veri Göndermek
Her sensör okumayı sürekli iletmek, özellikle birçok cihaz bant genişliği için yarıştığında ortak ağı aşırı yükleyebilir. Kaynakları korumak için yazarlar adaptif bir olay-tetiklemeli mekanizma getirir. Sistem sabit zaman aralıklarında veri göndermek yerine, mevcut okumanın iletilen son okumadan ne kadar farklılaştığını izler. Dinamik bir eşik, değişimin yeni bir iletiyi hak edecek kadar önemli olup olmadığına karar verir. Bu eşik sabit değildir: yakın dönem davranışa dayalı basit bir güncelleme kuralıyla kendini ayarlar; bu sayede sakin dönemlerde sistem çok az güncelleme gönderirken hızlı veya öngörülemeyen değişikliklerde daha konuşkan olur. Önemli olarak, bu mekanizma iletim halindeki veriyi değiştirerek sızdırmaya çalışan aldatma saldırılarına karşı dayanıklı olacak şekilde tasarlanmıştır; tetikleme şartı hem ağ hatalarını hem de olası saldırı sinyallerini dikkate alır.

Matematiksel Güvenceler ve Deneysel Örnekler
Bu stratejinin arkasında dikkatli bir matematiksel analiz yatıyor. Yazarlar rastgele aktüatör arızalarını ve siber saldırıları standart olasılık araçlarıyla modeller, ardından sistemin zaman içindeki evrimini izlemek için özel bir enerji-benzeri fonksiyon kurarlar. Bir dizi matris eşitsizliğini zorunlu kılarak, gözlemci, denetleyici ve olay-tetikleme kurallarının bir arada sistemin kararlılığını koruduğu ve bozucu etkenlerin etkisini belirlenen bir düzeyle sınırladığı koşulları türetirler. Tasarımlarını iki örnekte test ederler: genel bir kıyaslama sistemi ve zamanla değişen gecikmelere, bozucu etkenlere, iletişim kanalına yapılan saldırılara ve rastgele aktüatör arızalarına maruz kalan tek bağlantılı bir robot kolu. Her iki durumda da kontrolsüz sistem kararsız hale gelirken, önerilen yöntem hareketleri hızla sıfıra doğru geri getirir ve orada tutar.
Gerçek Dünya Sistemleri İçin Anlamı
Çalışma, performanstan taviz vermeden ağ kullanımında tasarruf sağlayan ve aynı zamanda güvenli olabilen kontrol şemaları tasarlamanın mümkün olduğunu gösteriyor. Bozucu etken gözlemi, hata toleransı ve adaptif veri iletimini tek bir çerçevede birleştirerek yöntem, düşmanca veya belirsiz ortamlarda güvenli çalışmak zorunda olan geleceğin siber-fiziksel sistemleri için bir araç seti sağlar. Endüstriyel robotlar, akıllı şebekeler veya otonom araçlar tasarlayan mühendisler için bu yaklaşım, bazı parçalar düzgün çalışmasa ve saldırganlar denetim mantığını yanıltmaya çalışsa bile makineleri dengede tutmanın; iletişim yükünü azaltmanın ve enerji tasarrufu sağlamanın bir yolunu sunar.
Atıf: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
Anahtar kelimeler: ağ kontrollü sistemler, siber-fiziksel güvenlik, olay-tetiklemeli kontrol, aktüatör arızaları, bozucu etkenlerin reddi