Clear Sky Science · nl
Observer-gebaseerde veilige $$H_{\infty }$$-regeling voor netwerkgestuurde regelsystemen met meerdere storingen, actuatorstoringen en misleidingsaanvallen onder een adaptief gebeurtenis-geactiveerd mechanisme
Het veilig en stabiel houden van verbonden machines
Moderne technologie steunt op netwerken van sensoren, computers en motoren om alles aan te sturen, van robotarmen op fabriekvloeren tot autonome drones en slimme energiesystemen. Deze netwerkgestuurde regelsystemen kunnen efficiënt en flexibel zijn, maar ze zijn ook kwetsbaar: willekeurige storingen uit de omgeving, versleten hardware en zelfs opzettelijke cyberaanvallen kunnen ze uit balans brengen. Dit artikel presenteert een nieuwe manier om zulke systemen stabiel en betrouwbaar te houden, zelfs wanneer ze gelijktijdig door meerdere problemen worden getroffen, en vermindert tegelijk de hoeveelheid gegevens die over het netwerk moeten worden verzonden.
Waarom netwerkmachines moeilijk te beschermen zijn
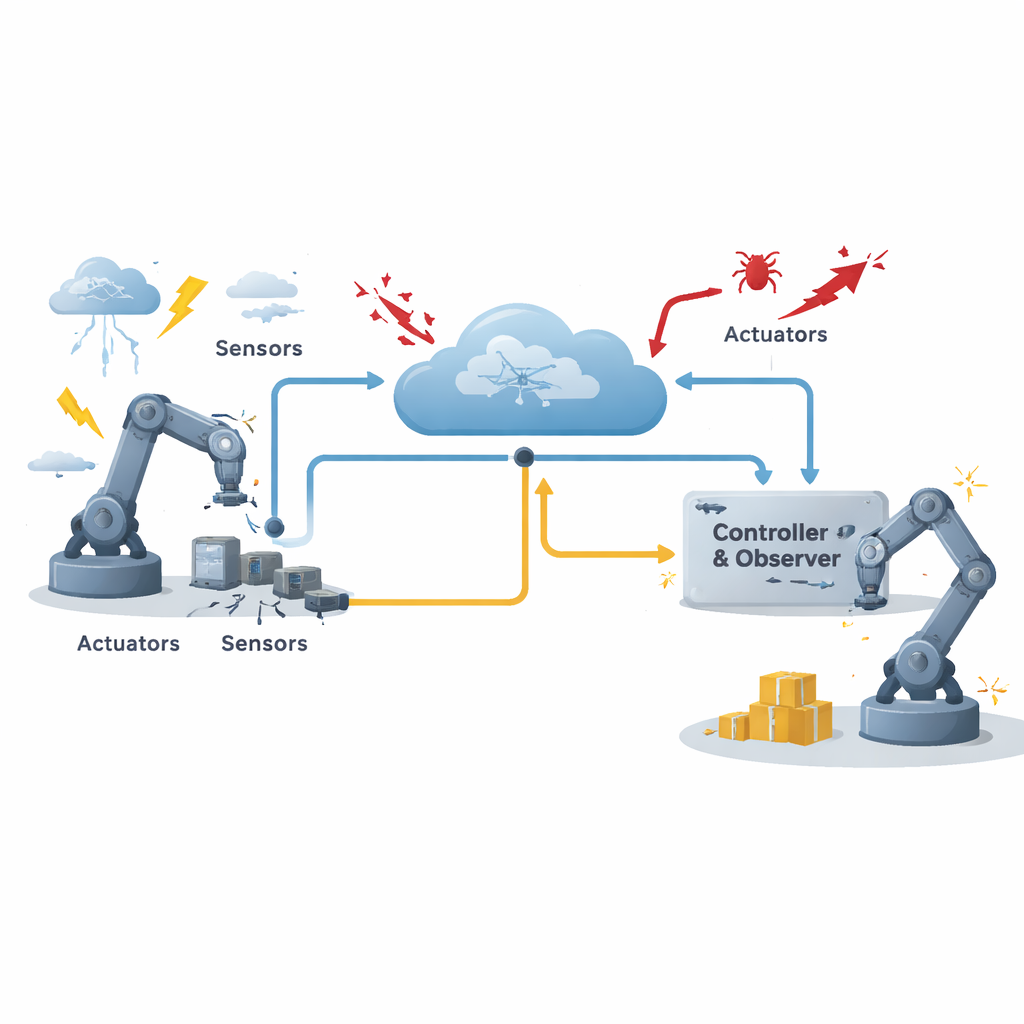
In een typisch netwerkgestuurd regelsysteem meten sensoren het gedrag van een machine, berekent een regelaar wat er moet gebeuren, en zetten actuatoren krachten of bewegingen om, allemaal verbonden via een gedeeld communicatienetwerk. Deze opzet bespaart bekabeling, kosten en onderhoudsinspanningen, maar introduceert nieuwe risico’s. Berichten kunnen vertraagd raken of verloren gaan, apparaten kunnen falen en kwaadwillenden kunnen gegevens onderweg manipuleren. De auteurs richten zich op een bijzonder gevaarlijk type cyberdreiging dat een misleidingsaanval wordt genoemd, waarbij valse signalen worden geïnjecteerd zodat de regelaar een verkeerd beeld van het systeem “ziet”. Tegelijkertijd wordt de machine geconfronteerd met twee typen storingen: sommige zijn globaal te modelleren, zoals voorspelbare trillingen, terwijl andere rommelig zijn en moeilijk van tevoren te beschrijven. Actuatoren zelf kunnen ook gedeeltelijk of volledig uitvallen door veroudering of overbelasting.
Verborgen storingen in realtime volgen
Om met deze onzekerheden om te gaan, ontwerpen de onderzoekers een speciaal softwareonderdeel dat een observer wordt genoemd. In plaats van alleen op directe sensormetingen te vertrouwen, reconstrueert de observer verborgen storingen door het verwachte gedrag van het systeem te vergelijken met wat daadwerkelijk wordt gemeten. Vervolgens schat hij in welk deel van de waargenomen beweging door bekende invloeden wordt veroorzaakt en wat toe te schrijven is aan onbekende verstoringen. Deze schatting wordt aan de regelaar gevoerd, die deze gebruikt om het effect van storingen zoveel mogelijk te compenseren. In eenvoudige bewoordingen leert het systeem onderscheid te maken tussen zijn eigen bedoelde acties en de “ruis” afkomstig uit de omgeving of van kwaadaardige interferentie, en verzet het zich actief tegen die ruis.
Gegevens alleen versturen als het ertoe doet
Het voortdurend verzenden van elke sensormeting kan een gedeeld netwerk overbelasten, vooral wanneer veel apparaten om bandbreedte concurreren. Om middelen te besparen introduceren de auteurs een adaptief gebeurtenis-geactiveerd mechanisme. In plaats van data op vaste tijdstappen te verzenden, bewaakt het systeem hoeveel de huidige meting afwijkt van de laatste verzonden waarde. Een dynamische drempel bepaalt of de verandering belangrijk genoeg is om een nieuw bericht te rechtvaardigen. Deze drempel is niet vast: hij past zich aan met een eenvoudige update-regel op basis van recent gedrag, zodat het systeem tijdens rustige periodes zeer weinig updates verzendt, terwijl het bij snelle of onvoorspelbare veranderingen spraakzamer wordt. Belangrijk is dat dit mechanisme robuust is tegen misleidingsaanvallen die proberen gewijzigde gegevens door te sluizen; de triggerconditie houdt zowel netwerkfouten als mogelijke aanvalssignalen rekening mee.

Wiskundige garanties en tests
Achter deze aanpak schuilt een zorgvuldige wiskundige analyse. De auteurs modelleren willekeurige actuatorstoringen en cyberaanvallen met behulp van standaard probabilistische hulpmiddelen en construeren vervolgens een speciale energieachtige functie om te volgen hoe het systeem in de tijd evolueert. Door een reeks matrixongelijkheden af te dwingen, leiden zij voorwaarden af waaronder de gecombineerde observer, regelaar en gebeurtenis-triggerregels het systeem stabiel houden en de impact van storingen tot een voorgeschreven niveau beperken. Ze testen hun ontwerp op twee voorbeelden: een generiek benchmark-systeem en een enkelvoudige robotarm gekoppeld aan één schakel die onderhevig is aan tijdsvariërende vertragingen, storingen, aanvallen op het communicatiekanaal en willekeurige actuatorstoringen. In beide gevallen wordt het onbeheerde systeem onstabiel, terwijl de voorgestelde methode de bewegingen snel naar nul terugbrengt en daar houdt.
Wat dit betekent voor systemen in de praktijk
De studie laat zien dat het mogelijk is regelschema’s te ontwerpen die zowel veilig als zuinig in netwerkgebruik zijn, zonder concessies te doen aan de prestatie. Door storingsobservatie, fouttolerantie en adaptieve gegevensoverdracht in één kader te combineren, biedt de methode een gereedschapskist voor toekomstige cyber-fysieke systemen die veilig moeten werken in vijandige of onzekere omgevingen. Voor ingenieurs die industriële robots, slimme netten of autonome voertuigen bouwen, biedt deze benadering een manier om machines stabiel te houden zelfs wanneer sommige onderdelen zich misdragen en wanneer aanvallers proberen de regel-logica te misleiden, terwijl de communicatielast wordt verminderd en energie wordt bespaard.
Bronvermelding: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
Trefwoorden: netwerkgestuurde regelsystemen, cyber-fysieke beveiliging, gebeurtenis-geactiveerde regeling, actuatorstoringen, onderdrukking van storingen