Clear Sky Science · es
Control seguro basado en observador $$H_{\infty }$$ para sistemas de control en red con múltiples perturbaciones, fallos en actuadores y ataques de engaño bajo un mecanismo adaptativo basado en eventos
Mantener seguras y estables a las máquinas conectadas
La tecnología moderna depende de redes de sensores, ordenadores y motores para gestionar desde brazos robóticos en fábricas hasta drones autónomos y sistemas energéticos inteligentes. Estos sistemas de control en red pueden ser eficientes y flexibles, pero también son vulnerables: perturbaciones aleatorias del entorno, hardware desgastado e incluso ciberataques deliberados pueden desestabilizarlos. Este artículo presenta una nueva forma de mantener tales sistemas estables y fiables, incluso cuando son asaltados por múltiples problemas a la vez, y al mismo tiempo reduce la cantidad de datos que deben enviarse por la red.
Por qué es difícil proteger a las máquinas en red
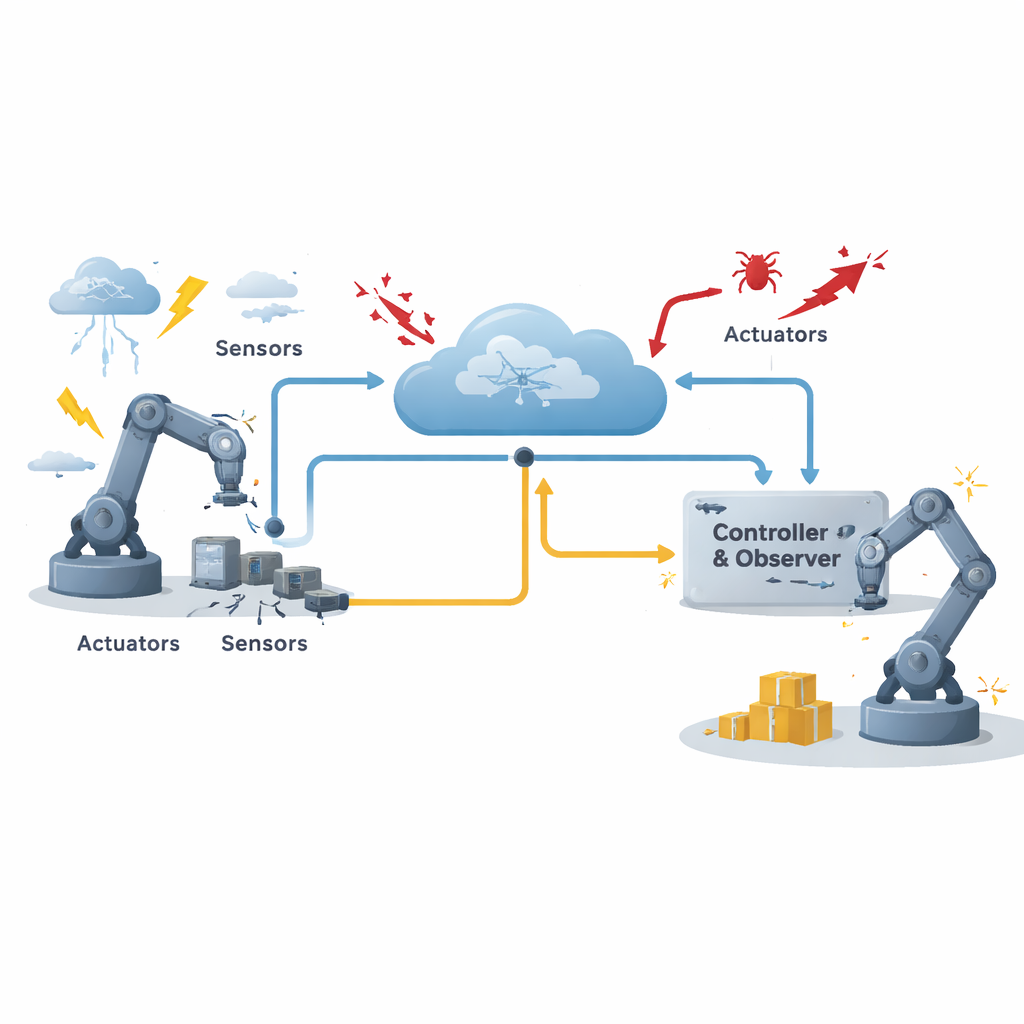
En un sistema de control en red típico, los sensores miden el comportamiento de la máquina, un controlador calcula qué debe hacerse y los actuadores aplican fuerzas o movimientos, todo conectado a través de una red de comunicación compartida. Esta configuración ahorra cableado, costes y mantenimiento, pero introduce nuevos riesgos. Los mensajes pueden sufrir retrasos o perderse, los dispositivos pueden fallar y actores hostiles pueden manipular los datos en tránsito. Los autores se centran en un tipo de ciberamenaza particularmente peligroso llamada ataque de engaño, en el que se inyectan señales falsas para que el controlador “vea” una imagen engañosa del sistema. Al mismo tiempo, la máquina afronta dos tipos de perturbaciones: algunas pueden modelarse de forma aproximada, como vibraciones previsibles, mientras que otras son desordenadas y difíciles de describir de antemano. Los propios actuadores también pueden fallar parcial o completamente por envejecimiento o sobrecarga.
Vigilar las perturbaciones ocultas en tiempo real
Para hacer frente a estas incertidumbres, los investigadores diseñan un componente de software especial llamado observador. En lugar de confiar únicamente en las lecturas directas de los sensores, el observador reconstruye las perturbaciones ocultas comparando el comportamiento esperado del sistema con lo que realmente se mide. A continuación estima cuánto del movimiento observado es causado por influencias conocidas y cuánto se debe a perturbaciones desconocidas. Esta estimación se suministra al controlador, que la usa para cancelar en la medida de lo posible el efecto de las perturbaciones. En términos sencillos, el sistema aprende a distinguir entre sus propias acciones intencionadas y el “ruido” procedente del entorno o de interferencias maliciosas, y luego resiste activamente ese ruido.
Enviar datos solo cuando importa
Transmitir constantemente cada lectura del sensor puede sobrecargar una red compartida, especialmente cuando muchos dispositivos compiten por el ancho de banda. Para ahorrar recursos, los autores introducen un mecanismo adaptativo disparado por eventos. En lugar de enviar datos a intervalos fijos, el sistema supervisa cuánto difiere la lectura actual de la última transmitida. Un umbral dinámico decide si el cambio es lo bastante importante como para justificar un nuevo mensaje. Ese umbral no es fijo: se ajusta mediante una regla de actualización simple basada en el comportamiento reciente, de modo que durante periodos tranquilos el sistema envía muy pocas actualizaciones, mientras que durante cambios rápidos o impredecibles se vuelve más comunicativo. Es importante que este mecanismo esté diseñado para ser robusto frente a ataques de engaño que intenten colar datos alterados; la condición de disparo tiene en cuenta tanto los errores de red como las posibles señales de ataque.

Garantías matemáticas y casos de prueba
Tras esta estrategia hay un análisis matemático cuidadoso. Los autores modelan fallos aleatorios de actuadores y ciberataques usando herramientas probabilísticas estándar, y luego construyen una función especial similar a una energía para seguir la evolución del sistema en el tiempo. Al imponer un conjunto de desigualdades matriciales, derivan condiciones bajo las cuales el observador, el controlador y las reglas de disparo por eventos combinados mantienen la estabilidad del sistema y limitan el impacto de las perturbaciones a un nivel prescrito. A continuación prueban su diseño en dos ejemplos: un sistema de referencia genérico y un brazo robótico de un solo eslabón sujeto a retardos variables en el tiempo, perturbaciones, ataques en el canal de comunicación y fallos aleatorios de actuadores. En ambos casos, el sistema sin control se vuelve inestable, mientras que el método propuesto recupera rápidamente los movimientos hacia cero y los mantiene allí.
Qué significa esto para sistemas del mundo real
El estudio demuestra que es posible diseñar esquemas de control que sean a la vez seguros y ahorradores en el uso de la red, sin sacrificar el rendimiento. Al combinar observación de perturbaciones, tolerancia a fallos y transmisión de datos adaptativa en un único marco, el método ofrece una caja de herramientas para futuros sistemas ciberfísicos que deben operar con seguridad en entornos hostiles o inciertos. Para ingenieros que construyen robots industriales, redes eléctricas inteligentes o vehículos autónomos, este enfoque ofrece una manera de mantener las máquinas estables incluso cuando algunas partes se comportan mal y cuando los atacantes intentan engañar a la lógica de control, todo ello reduciendo la carga de comunicación y ahorrando energía.
Cita: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
Palabras clave: sistemas de control en red, seguridad ciberfísica, control disparado por eventos, fallos de actuadores, rechazo de perturbaciones