Clear Sky Science · en
Observer-based secure $$H_{\infty }$$ control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism
Keeping Connected Machines Safe and Steady
Modern technology relies on networks of sensors, computers, and motors to run everything from robot arms on factory floors to autonomous drones and smart energy systems. These networked control systems can be efficient and flexible, but they are also vulnerable: random disturbances from the environment, worn-out hardware, and even deliberate cyber-attacks can push them off balance. This paper presents a new way to keep such systems stable and reliable, even when they are bombarded by multiple problems at once, while also cutting down on the amount of data they need to send over the network.
Why Networked Machines Are Hard to Protect
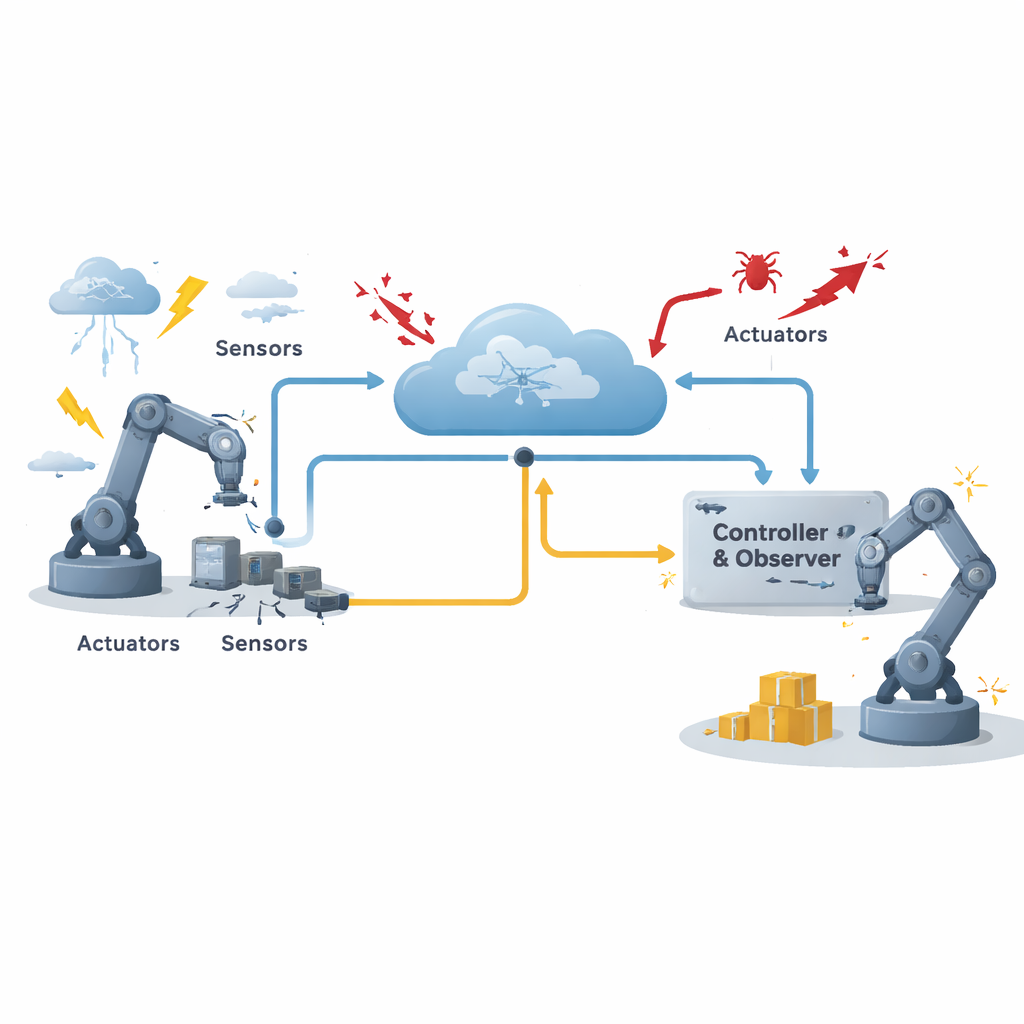
In a typical networked control system, sensors measure how a machine is behaving, a controller computes what should be done, and actuators apply forces or motions, all connected through a shared communication network. This setup saves wiring, cost, and maintenance effort, but it introduces new risks. Messages can be delayed or lost, devices can fail, and hostile actors can tamper with data in transit. The authors focus on a particularly dangerous type of cyber-threat called a deception attack, in which false signals are injected so that the controller “sees” a misleading picture of the system. At the same time, the machine faces two types of disturbances: some can be roughly modeled, like predictable vibrations, while others are messy and hard to describe in advance. Actuators themselves may also partially or completely fail due to aging or overload.
Watching Hidden Disturbances in Real Time
To cope with these uncertainties, the researchers design a special software component called an observer. Instead of relying only on direct sensor readings, the observer reconstructs hidden disturbances by comparing the expected behavior of the system with what is actually measured. It then estimates how much of the observed motion is caused by known influences and how much is due to unknown disruptions. This estimate is fed to the controller, which uses it to cancel out the effect of disturbances as much as possible. In simple terms, the system learns to distinguish between its own intended actions and the “noise” coming from the environment or from malicious interference, and then actively resists that noise.
Sending Data Only When It Matters
Constantly transmitting every sensor reading can overload a shared network, especially when many devices compete for bandwidth. To save resources, the authors introduce an adaptive event-triggered mechanism. Instead of sending data at fixed time steps, the system monitors how much the current reading differs from the last one that was transmitted. A dynamic threshold decides whether the change is important enough to warrant a new message. This threshold is not fixed: it adjusts itself using a simple update rule based on recent behavior, so that during calm periods the system sends very few updates, while during fast or unpredictable changes it becomes more talkative. Importantly, this mechanism is designed to be robust to deception attacks that try to slip in altered data; the triggering condition takes into account both the network errors and the possible attack signals.

Mathematical Guarantees and Test Cases
Behind this strategy lies a careful mathematical analysis. The authors model random actuator failures and cyber-attacks using standard probability tools, then construct a special energy-like function to track how the system evolves over time. By enforcing a set of matrix inequalities, they derive conditions under which the combined observer, controller, and event-triggering rules keep the system stable and limit the impact of disturbances to a prescribed level. They then test their design on two examples: a generic benchmark system and a single-link robot arm subject to time-varying delays, disturbances, attacks on the communication channel, and random actuator failures. In both cases, the uncontrolled system becomes unstable, while the proposed method quickly brings the motions back toward zero and keeps them there.
What This Means for Real-World Systems
The study shows that it is possible to design control schemes that are both secure and frugal with network usage, without sacrificing performance. By combining disturbance observation, fault tolerance, and adaptive data transmission into a single framework, the method provides a toolbox for future cyber-physical systems that must operate safely in hostile or uncertain environments. For engineers building industrial robots, smart grids, or autonomous vehicles, this approach offers a way to keep machines steady even when some parts misbehave and when attackers try to mislead the control logic, all while reducing communication load and saving energy.
Citation: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
Keywords: networked control systems, cyber-physical security, event-triggered control, actuator faults, disturbance rejection