Clear Sky Science · pt
Controle seguro baseado em observador $$H_{\infty }$$ para sistemas de controle em rede com múltiplas perturbações, falhas de atuadores e ataques de engano sob mecanismo adaptativo acionado por eventos
Mantendo Máquinas Conectadas Seguras e Estáveis
A tecnologia moderna depende de redes de sensores, computadores e motores para operar desde braços robóticos em fábricas até drones autônomos e sistemas de energia inteligente. Esses sistemas de controle em rede podem ser eficientes e flexíveis, mas também são vulneráveis: perturbações aleatórias do ambiente, hardware desgastado e até ataques cibernéticos deliberados podem desestabilizá‑los. Este artigo apresenta uma nova forma de manter tais sistemas estáveis e confiáveis, mesmo quando são bombardeados por múltiplos problemas ao mesmo tempo, ao mesmo tempo em que reduz a quantidade de dados que precisam ser enviados pela rede.
Por que Máquinas em Rede São Difíceis de Proteger
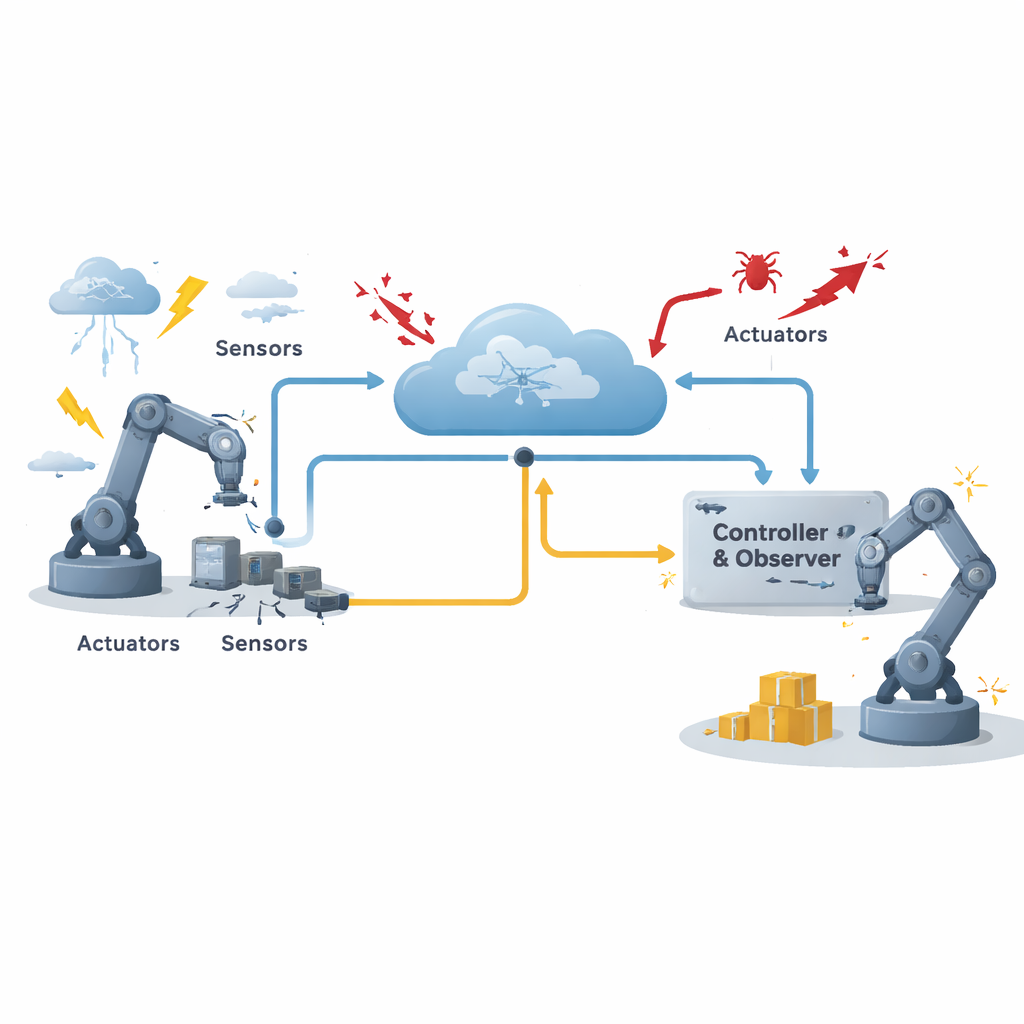
Em um sistema de controle em rede típico, sensores medem o comportamento de uma máquina, um controlador calcula o que deve ser feito e atuadores aplicam forças ou movimentos, todos conectados por uma rede de comunicação compartilhada. Essa configuração economiza cabeamento, custos e esforço de manutenção, mas introduz novos riscos. Mensagens podem ser atrasadas ou perdidas, dispositivos podem falhar e atores hostis podem adulterar dados em trânsito. Os autores se concentram em um tipo particularmente perigoso de ameaça cibernética chamada ataque de engano, no qual sinais falsos são injetados para que o controlador “veja” uma imagem enganosa do sistema. Ao mesmo tempo, a máquina enfrenta dois tipos de perturbações: algumas podem ser modeladas de forma aproximada, como vibrações previsíveis, enquanto outras são desordenadas e difíceis de descrever antecipadamente. Os próprios atuadores também podem falhar parcial ou completamente devido ao desgaste ou sobrecarga.
Observando Perturbações Ocultas em Tempo Real
Para lidar com essas incertezas, os pesquisadores projetam um componente de software especial chamado observador. Em vez de depender apenas das leituras diretas dos sensores, o observador reconstrói as perturbações ocultas comparando o comportamento esperado do sistema com o que é realmente medido. Em seguida, estima quanto do movimento observado é causado por influências conhecidas e quanto se deve a perturbações desconhecidas. Essa estimativa é enviada ao controlador, que a usa para cancelar o efeito das perturbações o máximo possível. Em termos simples, o sistema aprende a distinguir entre suas próprias ações intencionais e o “ruído” vindo do ambiente ou de interferência maliciosa, e então resiste ativamente a esse ruído.
Enviando Dados Só Quando Importa
Transmitir constantemente cada leitura de sensor pode sobrecarregar uma rede compartilhada, especialmente quando muitos dispositivos competem pela largura de banda. Para economizar recursos, os autores introduzem um mecanismo adaptativo acionado por eventos. Em vez de enviar dados em passos de tempo fixos, o sistema monitora o quanto a leitura atual difere da última que foi transmitida. Um limiar dinâmico decide se a mudança é importante o suficiente para justificar uma nova mensagem. Esse limiar não é fixo: ele se ajusta usando uma regra de atualização simples baseada no comportamento recente, de modo que durante períodos calmos o sistema envie pouquíssimas atualizações, enquanto durante mudanças rápidas ou imprevisíveis ele se torne mais comunicativo. Importante, esse mecanismo foi projetado para ser robusto a ataques de engano que tentam inserir dados alterados; a condição de acionamento leva em conta tanto os erros de rede quanto os possíveis sinais de ataque.

Garantias Matemáticas e Casos de Teste
Por trás dessa estratégia está uma análise matemática cuidadosa. Os autores modelam falhas aleatórias de atuadores e ataques cibernéticos usando ferramentas probabilísticas padrão e então constroem uma função especial, semelhante a uma energia, para rastrear como o sistema evolui ao longo do tempo. Ao impor um conjunto de desigualdades matriciais, eles derivam condições sob as quais o observador combinado, o controlador e as regras de acionamento por evento mantêm o sistema estável e limitam o impacto das perturbações a um nível preestabelecido. Em seguida, testam seu projeto em dois exemplos: um sistema de referência genérico e um braço robótico de elo único sujeito a atrasos variant es no tempo, perturbações, ataques no canal de comunicação e falhas aleatórias de atuadores. Em ambos os casos, o sistema sem controle torna‑se instável, enquanto o método proposto rapidamente devolve os movimentos em direção a zero e os mantém lá.
O Que Isso Significa para Sistemas do Mundo Real
O estudo mostra que é possível projetar esquemas de controle que sejam simultaneamente seguros e econômicos no uso da rede, sem sacrificar desempenho. Ao combinar observação de perturbações, tolerância a falhas e transmissão adaptativa de dados em uma única estrutura, o método fornece uma caixa de ferramentas para futuros sistemas ciber‑físicos que precisam operar com segurança em ambientes hostis ou incertos. Para engenheiros que constroem robôs industriais, redes elétricas inteligentes ou veículos autônomos, essa abordagem oferece uma forma de manter as máquinas estáveis mesmo quando algumas partes se comportam mal e quando atacantes tentam enganar a lógica de controle, tudo isso reduzindo a carga de comunicação e economizando energia.
Citação: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
Palavras-chave: sistemas de controle em rede, segurança ciber-física, controle acionado por eventos, falhas de atuadores, rejeição de perturbações