Clear Sky Science · fr
Commande sécurisée basée sur observateur $$H_{\infty }$$ pour systèmes de contrôle en réseau avec perturbations multiples, défaillances d’actionneurs et attaques de tromperie sous mécanisme événementiel adaptatif
Maintenir la sécurité et la stabilité des machines connectées
La technologie moderne repose sur des réseaux de capteurs, d’ordinateurs et d’actionneurs pour piloter tout, des bras robotiques en usine aux drones autonomes et aux systèmes énergétiques intelligents. Ces systèmes de contrôle en réseau peuvent être efficaces et souples, mais ils sont aussi vulnérables : des perturbations aléatoires de l’environnement, des composants usés, et même des attaques cybernétiques délibérées peuvent les déséquilibrer. Cet article présente une nouvelle méthode pour garder de tels systèmes stables et fiables, même lorsqu’ils sont confrontés simultanément à plusieurs problèmes, tout en réduisant la quantité de données qu’ils doivent transmettre sur le réseau.
Pourquoi il est difficile de protéger les machines en réseau
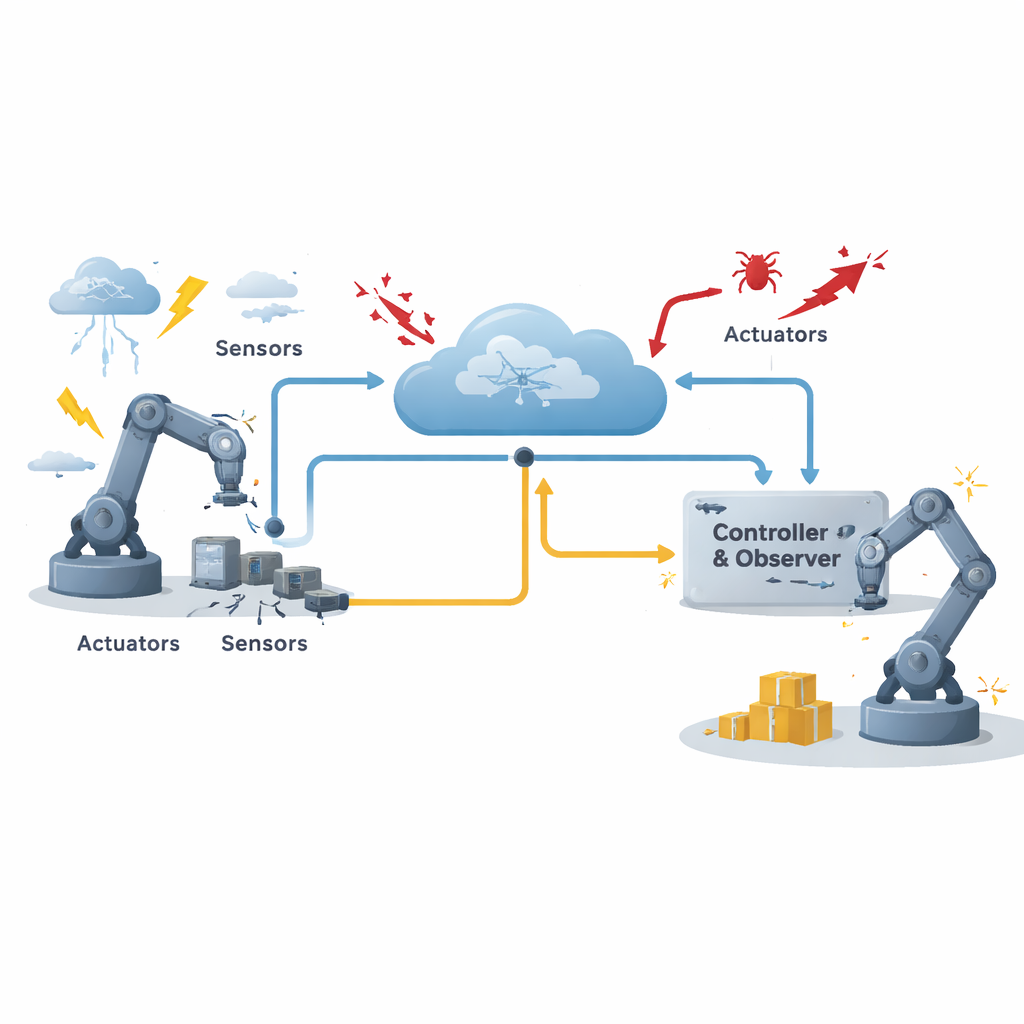
Dans un système de contrôle en réseau typique, des capteurs mesurent le comportement d’une machine, un contrôleur calcule ce qu’il faut faire, et des actionneurs appliquent forces ou mouvements, le tout relié par un réseau de communication partagé. Cette architecture économise du câblage, des coûts et de la maintenance, mais introduit de nouveaux risques. Les messages peuvent être retardés ou perdus, des dispositifs peuvent tomber en panne, et des acteurs malveillants peuvent falsifier les données en transit. Les auteurs se concentrent sur un type de menace particulièrement dangereux appelé attaque de tromperie, où des signaux falsifiés sont injectés pour que le contrôleur « voie » une image erronée du système. Parallèlement, la machine subit deux types de perturbations : certaines sont relativement modélisables, comme des vibrations prévisibles, tandis que d’autres sont désordonnées et difficiles à décrire a priori. Les actionneurs peuvent aussi connaître des défaillances partielles ou totales dues à l’usure ou à la surcharge.
Surveiller les perturbations cachées en temps réel
Pour faire face à ces incertitudes, les chercheurs conçoivent un composant logiciel spécial appelé observateur. Plutôt que de se fier uniquement aux lectures directes des capteurs, l’observateur reconstruit les perturbations cachées en comparant le comportement attendu du système avec ce qui est réellement mesuré. Il estime ensuite quelle part du mouvement observé est due à des influences connues et quelle part provient de perturbations inconnues. Cette estimation est transmise au contrôleur, qui l’utilise pour annuler autant que possible l’effet des perturbations. En termes simples, le système apprend à distinguer entre ses propres actions voulues et le « bruit » provenant de l’environnement ou d’interférences malveillantes, puis s’y oppose activement.
Transmettre des données uniquement quand cela compte
Transmettre constamment chaque valeur mesurée peut saturer un réseau partagé, surtout lorsque de nombreux dispositifs se disputent la bande passante. Pour économiser les ressources, les auteurs introduisent un mécanisme événementiel adaptatif. Plutôt que d’envoyer des données à des pas de temps fixes, le système surveille l’écart entre la lecture actuelle et la dernière valeur transmise. Un seuil dynamique décide si la variation est suffisamment importante pour justifier un nouveau message. Ce seuil n’est pas fixe : il s’ajuste lui‑même selon une règle de mise à jour simple basée sur le comportement récent, de sorte que pendant les périodes calmes le système envoie très peu de mises à jour, tandis que lors de changements rapides ou imprévisibles il devient plus bavard. Fait important, ce mécanisme est conçu pour être robuste face aux attaques de tromperie qui tenteraient d’introduire des données altérées ; la condition de déclenchement prend en compte à la fois les erreurs réseau et les signaux d’attaque possibles.

Garanties mathématiques et cas de test
Cette stratégie repose sur une analyse mathématique rigoureuse. Les auteurs modélisent les défaillances aléatoires d’actionneurs et les cyber‑attaques à l’aide d’outils probabilistes standard, puis construisent une fonction de type énergie pour suivre l’évolution du système dans le temps. En imposant un ensemble d’inégalités matricielles, ils dérivent des conditions sous lesquelles l’observateur combiné, le contrôleur et les règles de déclenchement événementiel maintiennent la stabilité du système et limitent l’impact des perturbations à un niveau prescrit. Ils testent ensuite leur conception sur deux exemples : un système de référence générique et un bras robotisé à un seul lien soumis à des retards variables, à des perturbations, à des attaques sur la voie de communication et à des défaillances aléatoires d’actionneurs. Dans les deux cas, le système non contrôlé devient instable, tandis que la méthode proposée ramène rapidement les mouvements vers zéro et les y maintient.
Ce que cela signifie pour les systèmes réels
L’étude montre qu’il est possible de concevoir des schémas de commande à la fois sécurisés et économes en usage du réseau, sans sacrifier les performances. En combinant observation des perturbations, tolérance aux défauts et transmission de données adaptative dans un cadre unique, la méthode fournit une boîte à outils pour les futurs systèmes cyber‑physiques qui doivent fonctionner en toute sécurité dans des environnements hostiles ou incertains. Pour les ingénieurs qui conçoivent des robots industriels, des réseaux électriques intelligents ou des véhicules autonomes, cette approche offre un moyen de maintenir la stabilité des machines même lorsque certains éléments défaillent et lorsque des attaquants tentent de tromper la logique de contrôle, tout en réduisant la charge de communication et en économisant de l’énergie.
Citation: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
Mots-clés: systèmes de contrôle en réseau, sécurité cyber‑physique, commande à déclenchement événementiel, défaillances d’actionneurs, rejet des perturbations