Clear Sky Science · ja
多重外乱、アクチュエータ故障、および適応型イベントトリガ機構下の欺瞞攻撃を伴うネットワーク制御システムのためのオブザーバベースの安全な$$H_{\infty }$$制御
つながった機械を安全かつ安定に保つ
現代の技術は、工場のロボットアームから自律飛行ドローン、スマートエネルギーシステムに至るまで、センサー、コンピュータ、アクチュエータのネットワークに依存しています。これらのネットワーク制御システムは効率的で柔軟ですが、同時に脆弱でもあります。環境からのランダムな外乱、摩耗したハードウェア、さらには意図的なサイバー攻撃によってバランスを崩す可能性があります。本稿は、複数の問題が同時に発生している状況でもシステムを安定で信頼できる状態に保ちつつ、ネットワーク上で送信するデータ量も削減する新しい方法を提示します。
ネットワーク化された機械を守る難しさ
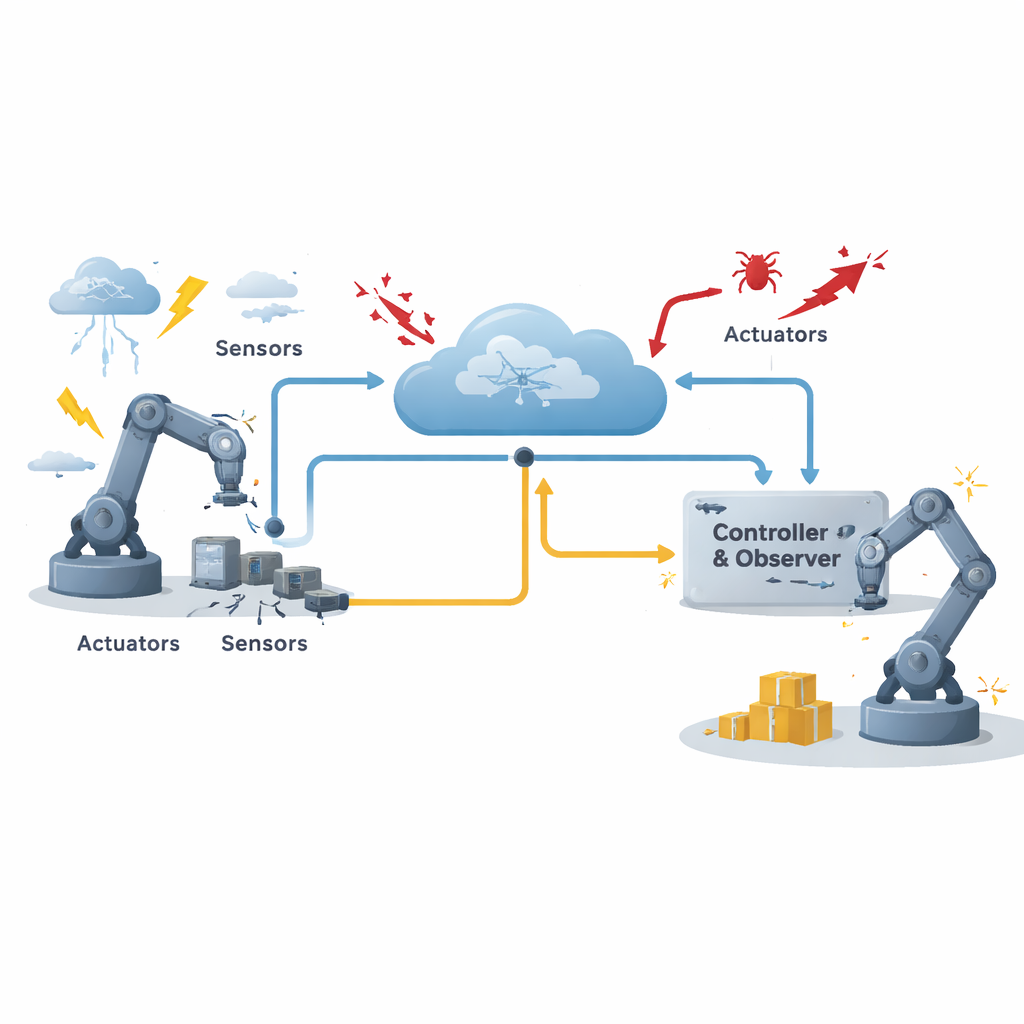
典型的なネットワーク制御システムでは、センサーが機械の挙動を計測し、コントローラが制御指令を算出し、アクチュエータが力や運動を与えます。これらは共有通信ネットワークを介して接続されます。この構成は配線やコスト、保守の手間を節約しますが、新たなリスクも生みます。メッセージが遅延したり失われたりし、機器が故障し、敵対的な行為者が通信用データを改ざんすることがあり得ます。著者らが注目するのは、欺瞞攻撃と呼ばれる特に危険なサイバー脅威で、偽の信号を注入してコントローラに誤ったシステム像を「見せる」ものです。同時に、機械は二種類の外乱に直面します:予測可能な振動のように大まかにモデル化できるものと、事前に記述しにくい荒れた外乱です。さらにアクチュエータ自体が経年や過負荷で部分的または完全に故障することもあります。
隠れた外乱をリアルタイムで観測する
これらの不確実性に対処するため、研究者らはオブザーバと呼ばれる特別なソフトウェア要素を設計しました。単にセンサー読み取りだけに依存するのではなく、オブザーバはシステムの期待される挙動と実際に測定された値を比較して隠れた外乱を再構築します。それにより、観測された動きのうち既知の影響によるものと未知の攪乱によるものとを推定します。この推定値がコントローラに供給され、外乱の影響を可能な限り打ち消すように用いられます。簡潔に言えば、システムは自身の意図した動作と環境や悪意ある干渉から来る「ノイズ」を区別し、それに対抗することを学習します。
重要なときだけデータを送る
すべてのセンサー読み取りを常時送信すると、特に多数のデバイスが帯域を争う共有ネットワークでは通信が逼迫します。資源を節約するため、著者らは適応型イベントトリガ機構を導入します。一定間隔でデータを送る代わりに、システムは現在の読み値が最後に送信した値とどれだけ異なるかを監視します。動的なしきい値がその変化が新たなメッセージに値するかを判断します。このしきい値は固定ではなく、最近の挙動に基づく単純な更新規則で自ら調整します。したがって静かな期間には更新は極めて少なく、急激または予測不能な変化時には送信が増えます。重要なのは、この機構が改ざんされたデータを密かに差し込もうとする欺瞞攻撃に対しても堅牢に設計されている点で、トリガ条件はネットワーク誤差と考えうる攻撃信号の双方を考慮します。

数学的保証と試験例
この戦略の背後には慎重な数学的解析があります。著者らは確率的手法を用いてランダムなアクチュエータ故障とサイバー攻撃をモデル化し、続いてシステムの時間発展を追跡するためのエネルギー類似の関数を構築します。行列不等式のセットを課すことにより、オブザーバ、コントローラ、およびイベントトリガ規則を組み合わせたときにシステムを安定化し、外乱の影響を所定のレベルに抑えるための条件を導出します。設計を二つの例で検証します:汎用的なベンチマーク系と、時変遅延・外乱・通信チャネルへの攻撃・ランダムなアクチュエータ故障にさらされる単リンクロボットアームです。いずれの場合も、制御を施さない系は不安定になりますが、提案手法は動作を迅速にゼロ付近へ戻し、そこで維持します。
現実のシステムにとっての意義
本研究は、性能を犠牲にすることなくネットワーク利用を節約しつつ安全性を確保できる制御スキームの設計が可能であることを示しています。外乱観測、フォールトトレランス、適応的データ伝送を単一の枠組みに組み合わせることで、本手法は敵対的または不確実な環境で安全に動作しなければならない将来のサイバーフィジカルシステムに対するツールボックスを提供します。産業用ロボット、スマートグリッド、自律走行体を設計する技術者にとって、本アプローチは一部の構成要素が誤動作し、攻撃者が制御ロジックを誤導しようとしても機械を安定に保ちつつ通信負荷を削減しエネルギーを節約する手段を提供します。
引用: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
キーワード: ネットワーク制御システム, サイバーフィジカルセキュリティ, イベントトリガ制御, アクチュエータ故障, 外乱除去