Clear Sky Science · sv
Observatörbaserad säker $$H_{\infty }$$-reglering för nätverksbaserade styrsystem med multipla störningar, actuatorsvikt och bedrägerianfall under adaptiv händelsestyrd mekanism
Hålla uppkopplade maskiner säkra och stabila
Modern teknik förlitar sig på nätverk av sensorer, datorer och motorer för att driva allt från robotarmar på fabriksgolv till autonoma drönare och smarta energisystem. Dessa nätverksbaserade styrsystem kan vara effektiva och flexibla, men de är också sårbara: slumpmässiga störningar från omgivningen, utslitna komponenter och till och med avsiktliga cyberangrepp kan rubba deras balans. Denna artikel presenterar ett nytt sätt att hålla sådana system stabila och tillförlitliga, även när de utsätts för flera problem samtidigt, samtidigt som mängden data som behöver skickas över nätverket minskas.
Varför det är svårt att skydda nätverksanslutna maskiner
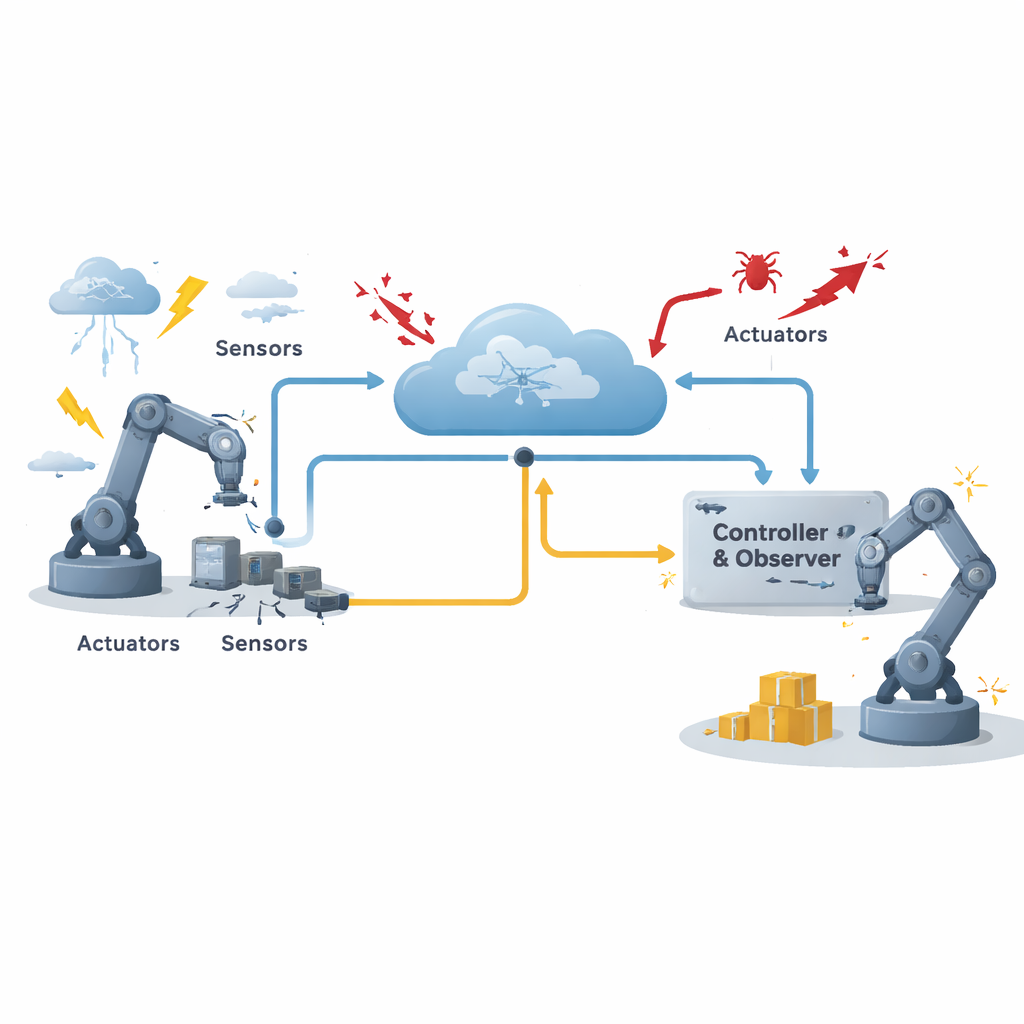
I ett typiskt nätverksbaserat styrsystem mäter sensorer hur en maskin beter sig, en regulator beräknar vad som bör göras, och aktuatorer applicerar krafter eller rörelser — allt kopplat via ett delat kommunikationsnätverk. Denna uppbyggnad sparar kablar, kostnader och underhållsarbete, men den introducerar nya risker. Meddelanden kan fördröjas eller gå förlorade, enheter kan fallera, och illasinnade aktörer kan manipulera data under överföring. Författarna fokuserar på en särskilt farlig typ av cyberhot som kallas bedrägerianfall, där falska signaler injiceras så att regulatorn ”ser” en missvisande bild av systemet. Samtidigt möter maskinen två typer av störningar: vissa kan modelleras någorlunda väl, som förutsägbara vibrationer, medan andra är röriga och svåra att beskriva i förväg. Aktuatorer kan också delvis eller helt fallera på grund av åldrande eller överbelastning.
Övervaka dolda störningar i realtid
För att hantera dessa osäkerheter utformar forskarna en speciell programkomponent kallad observatör. Istället för att enbart förlita sig på direkta sensormätningar rekonstruerar observatören dolda störningar genom att jämföra systemets förväntade beteende med vad som faktiskt mäts. Den uppskattar sedan hur mycket av den observerade rörelsen som orsakas av kända påverkan och hur mycket som beror på okända störningar. Denna uppskattning matas till regulatorn, som använder den för att så långt möjligt motverka störningarnas effekt. I enkla termer lär sig systemet att skilja mellan sina egna avsedda handlingar och det ”brus” som kommer från omgivningen eller från illvillig inblandning, och motverkar aktivt detta brus.
Skicka data endast när det spelar roll
Att ständigt sända varje sensormätning kan överbelasta ett delat nätverk, särskilt när många enheter konkurrerar om bandbredd. För att spara resurser introducerar författarna en adaptiv händelsestyrd mekanism. Istället för att skicka data vid fasta tidpunkter övervakar systemet hur mycket den aktuella avläsningen skiljer sig från den sista som skickades. En dynamisk tröskel avgör om förändringen är tillräckligt betydelsefull för att motivera ett nytt meddelande. Denna tröskel är inte fast: den justerar sig själv med en enkel uppdateringsregel baserad på senaste beteende, så att systemet under lugna perioder skickar mycket få uppdateringar, medan det vid snabba eller oförutsägbara förändringar blir mer pratglatt. Viktigt är att denna mekanism är utformad för att vara robust mot bedrägerianfall som försöker smyga in manipulerade data; utlösningsvillkoret tar hänsyn både till nätverksfel och möjliga angreppssignaler.

Matematiska garantier och testfall
Bakom denna strategi ligger en noggrann matematisk analys. Författarna modellerar slumpmässiga aktuatorfel och cyberangrepp med hjälp av standardverktyg från sannolikhetsteorin, och konstruerar därefter en särskild energi-liknande funktion för att följa hur systemet utvecklas över tiden. Genom att upprätthålla en uppsättning matrisolikheter härleder de villkor under vilka den kombinerade observatören, regulatorn och de händelsestyrda reglerna håller systemet stabilt och begränsar störningarnas påverkan till en föreskriven nivå. De testar sedan sin konstruktion på två exempel: ett generiskt benchmark-system och en enkel robotarm med en länk som utsätts för tidsvarierande fördröjningar, störningar, angrepp på kommunikationskanalen och slumpmässiga aktuatorfel. I båda fallen blir det oreglerade systemet instabilt, medan den föreslagna metoden snabbt för tillbaka rörelserna mot noll och håller dem där.
Vad detta innebär för verkliga system
Studien visar att det är möjligt att utforma regleringsscheman som både är säkra och sparsamma med nätverksanvändning, utan att offra prestanda. Genom att kombinera störningsobservation, feltolerans och adaptiv dataöverföring i en enda ram erbjuder metoden en verktygslåda för framtida cyber-fysiska system som måste fungera säkert i fientliga eller osäkra miljöer. För ingenjörer som bygger industrirobotar, smarta nät eller autonoma fordon ger detta tillvägagångssätt ett sätt att hålla maskiner stabila även när delar beter sig felaktigt och när angripare försöker vilseleda styrlogiken, samtidigt som kommunikationsbelastning och energiförbrukning minskas.
Citering: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
Nyckelord: nätverksbaserade styrsystem, cyber-fysisk säkerhet, händelsestyrd reglering, aktuatorfel, störningsdämpning