Clear Sky Science · ar
التحكم الآمن القائم على المراقب بصيغة $$H_{\infty}$$ لأنظمة التحكم الشبكية مع اضطرابات متعددة، فشل المشغّلات، وهجمات خداعية تحت آلية تحفيز حدثية تكيفية
حماية الآلات المتصلة والحفاظ على ثباتها
تعتمد التكنولوجيا الحديثة على شبكات من الحساسات والحواسيب والمحركات لتشغيل كل شيء من أذرع الروبوت في المصانع إلى الطائرات بدون طيار والأنظمة الذكية للطاقة. يمكن لأنظمة التحكم الشبكية هذه أن تكون فعّالة ومرنة، لكنها عرضة أيضاً للمخاطر: الاضطرابات العشوائية من البيئة، تآكل الأجهزة، وحتى الهجمات السيبرانية المتعمدة يمكن أن تخرّها عن حالة التوازن. تقدم هذه الورقة طريقة جديدة للحفاظ على ثبات وموثوقية مثل هذه الأنظمة حتى عندما تتعرض لعدة مشكلات في آن واحد، مع تقليل كمية البيانات التي تحتاج لإرسالها عبر الشبكة.
لماذا يصعب حماية الآلات الشبكية
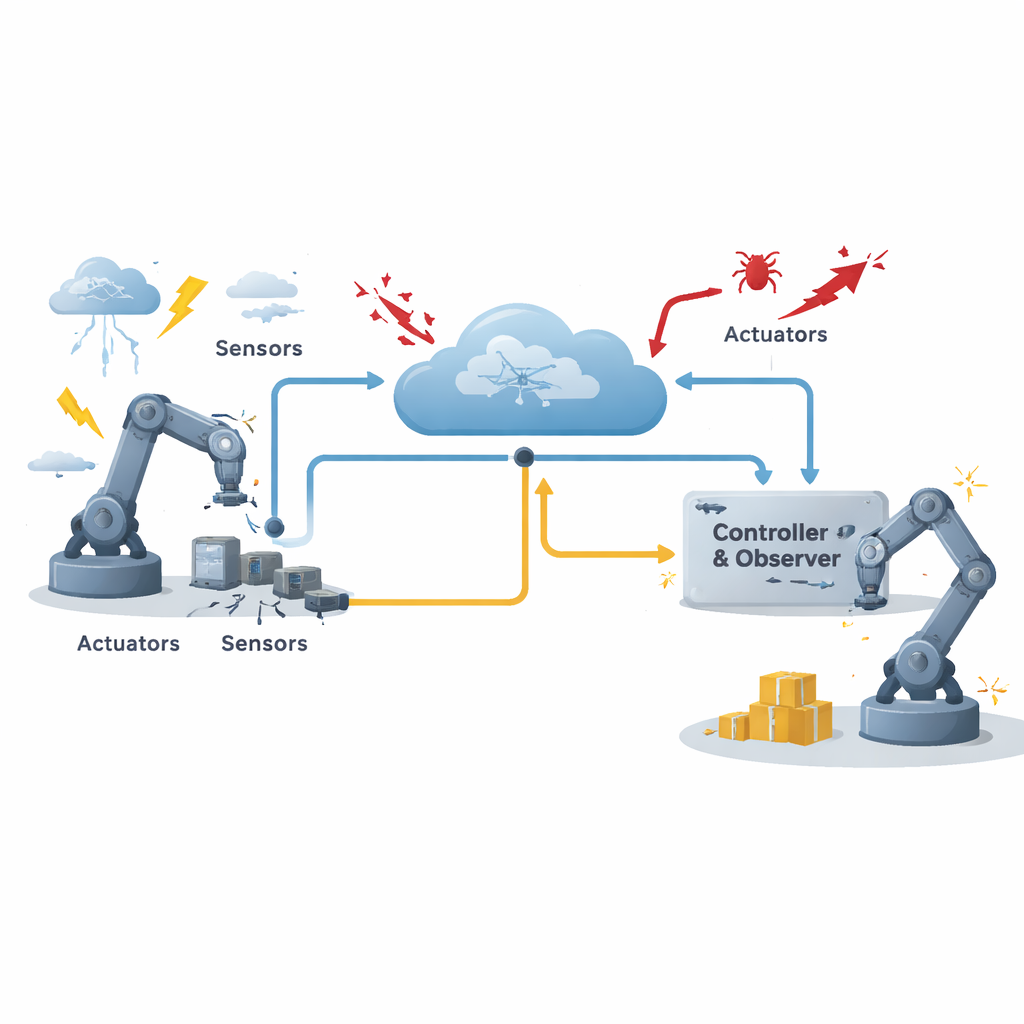
في نظام تحكم شبكي نموذجي، تقيس الحساسات سلوك الآلة، ويحسب المتحكم ما ينبغي القيام به، وتطبق المشغّلات القوى أو الحركات، وكل ذلك متصل عبر شبكة اتصال مشتركة. يوفر هذا الترتيب في الأسلاك والتكلفة وجهد الصيانة، لكنه يدخل مخاطر جديدة. قد تتأخر الرسائل أو تُفقد، قد تفشل الأجهزة، ويمكن للعاملين الخبيثين التلاعب بالبيانات أثناء النقل. يركز المؤلفون على نوع خطير من التهديدات السيبرانية يسمى هجوم الخداع، حيث تُحقن إشارات خاطئة بحيث يرى المتحكم صورة مضللة للنظام. وفي الوقت نفسه، تواجه الآلة نوعين من الاضطرابات: بعضها يمكن نمذجته تقريباً، مثل الاهتزازات المتوقعة، بينما بعضها الآخر فوضوي وصعب الوصف مسبقاً. كما قد تفشل المشغّلات جزئياً أو كلياً بسبب التعرّض أو التحميل الزائد.
مراقبة الاضطرابات الخفية في الزمن الحقيقي
لمواجهة هذه اللايقينات، صمّم الباحثون مكوّناً برمجياً خاصاً يُسمى المراقب. بدلاً من الاعتماد فقط على قراءات الحساس المباشرة، يعيد المراقب بناء الاضطرابات الخفية بمقارنة السلوك المتوقع للنظام بما يُقاس فعلاً. ثم يقدّر المراقب مقدار الحركة المرصودة الناتجة عن مؤثرات معروفة ومقدارها الناتج عن اضطرابات غير معروفة. تُغذى هذه التقديرات إلى المتحكم، الذي يستخدمها لإلغاء تأثير الاضطرابات بقدر الإمكان. ببساطة، يتعلم النظام التمييز بين أفعاله المقصودة و"الضوضاء" القادمة من البيئة أو من تدخل خبيث، ثم يقاوم تلك الضوضاء بشكل نشط.
إرسال البيانات فقط عندما يكون للأمر أهمية
يمكن أن يؤدي إرسال كل قراءة حساس دائماً إلى إثقال كاهل شبكة مشتركة، لا سيما عندما تتنافس العديد من الأجهزة على النطاق الترددي. لتوفير الموارد، يقدم المؤلفون آلية تحفيز حدثية تكيفية. بدلاً من إرسال البيانات في خطوات زمنية ثابتة، يراقب النظام مدى اختلاف القراءة الحالية عن آخر قراءة نُقلت. يقرر عتبة ديناميكية ما إذا كان التغير مهمًا بما يكفي لتبرير رسالة جديدة. هذه العتبة ليست ثابتة: فهي تعدل نفسها بقانون تحديث بسيط يعتمد على السلوك الأخير، بحيث خلال الفترات الهادئة يرسل النظام تحديثات قليلة جداً، بينما يصبح أكثر نشاطاً خلال التغيرات السريعة أو غير المتوقعة. ومن المهم أن هذه الآلية مصممة لتكون قوية أمام هجمات الخداع التي تحاول إدخال بيانات مُعدّلة؛ إذ تأخذ شرط التحفيز في الحسبان كلاً من أخطاء الشبكة والإشارات الهجومية المحتملة.

ضمانات رياضية وحالات اختبار
تستند هذه الاستراتيجية إلى تحليل رياضي دقيق. يقوم المؤلفون بنمذجة أعطال المشغّلات العشوائية والهجمات السيبرانية باستخدام أدوات احتمالية قياسية، ثم يبنون دالة شبيهة بالطاقة لتتبع تطور النظام عبر الزمن. من خلال فرض مجموعة من متباينات المصفوفات، يستنتجون شروطًا تُبقي المراقب والمتحكم وقواعد التحفيز الحدثية مجتمعة على ثبات النظام وتحد من تأثير الاضطرابات إلى مستوى محدد. ثم يختبرون تصميمهم على مثالين: نظام مرجعي عام وذراع روبوت أحادي الوصلة يخضع لتأخيرات متغيرة زمنياً، اضطرابات، هجمات على قناة الاتصال، وأعطال عشوائية في المشغّلات. في كلتا الحالتين، يصبح النظام غير المسيطر عليه غير مستقر، بينما تعيد الطريقة المقترحة الحركة إلى الصفر بسرعة وتحافظ عليها هناك.
ماذا يعني هذا للأنظمة الواقعية
تُظهر الدراسة أنه من الممكن تصميم مخططات تحكم تكون آمنة واقتصادية في استخدام الشبكة، دون التضحية بالأداء. من خلال دمج رصد الاضطرابات، التحمل للأعطال، وإرسال البيانات التكيفي في إطار واحد، يوفر الأسلوب صندوق أدوات للأنظمة السيبرانية-الفيزيائية المستقبلية التي يجب أن تعمل بأمان في بيئات عدائية أو غير مؤكدة. للمهندسين الذين يبنون روبوتات صناعية أو شبكات ذكية أو مركبات ذاتية القيادة، يوفر هذا النهج وسيلة للحفاظ على ثبات الآلات حتى عندما تسيء بعض الأجزاء التصرف ويحاول المهاجمون تضليل منطق التحكم، كل ذلك مع تقليل حمل الاتصالات وتوفير الطاقة.
الاستشهاد: Tajudeen, M.M., Banu, K.A., Tatar, Ne. et al. Observer-based secure \(H_{\infty }\) control for networked control systems with multiple disturbances, actuator failures, and deception attacks under adaptive event-triggered mechanism. Sci Rep 16, 10092 (2026). https://doi.org/10.1038/s41598-026-36662-4
الكلمات المفتاحية: أنظمة التحكم الشبكية, أمن الفضاء السيبراني-الفيزيائي, التحكم المحفز بالحدث, أعطال المشغّلات, رفض الاضطرابات