Clear Sky Science · sv
Design, ramverk och benchmark för säkerhetsövervakare för black-box-klassificerare
Varför säkra maskinbeslut är viktiga
I allt större utsträckning hjälper maskiner till att köra bilar, styra kirurgiska verktyg, övervaka fabriker och inspektera kritisk infrastruktur. Alla dessa uppgifter bygger på programvara som tittar på data och väljer mellan alternativ, som "säkert" eller "osäkert". När det omdömet är fel kan resultatet bli en missad inkräktare, en felbedömd trafiksignal eller en oupptäckt defekt komponent. Denna artikel undersöker hur sådan beslutsprogramvara kan omges av ett extra skyddsskikt så att riskfyllda svar flaggas och hålls tillbaka istället för att blint litas på.
Från perfekta svar till förtroendefullt beteende
Det mesta arbetet med artificiell intelligens försöker göra klassificerare så precisa som möjligt, men även de bästa systemen gör fortfarande misstag. Människliga experter felbedömer också situationer, ändå förlitar vi oss på dem eftersom de oftast vet när de bör be om hjälp. Författarna menar att maskinbeslutsfattare bör bete sig mer så. Istället för att tvinga en klassificerare att alltid välja en etikett bör den få säga "jag är osäker" och låta det större systemet reagera säkert. I praktiken innebär det att göra oförutsägbara felaktiga svar till kontrollerade avvisningar som andra delar av systemet kan hantera, till exempel genom att sakta ned ett fordon, be en människa om input eller växla till ett säkrare läge.
Lägga till ett säkerhetslager runt black-box-modeller
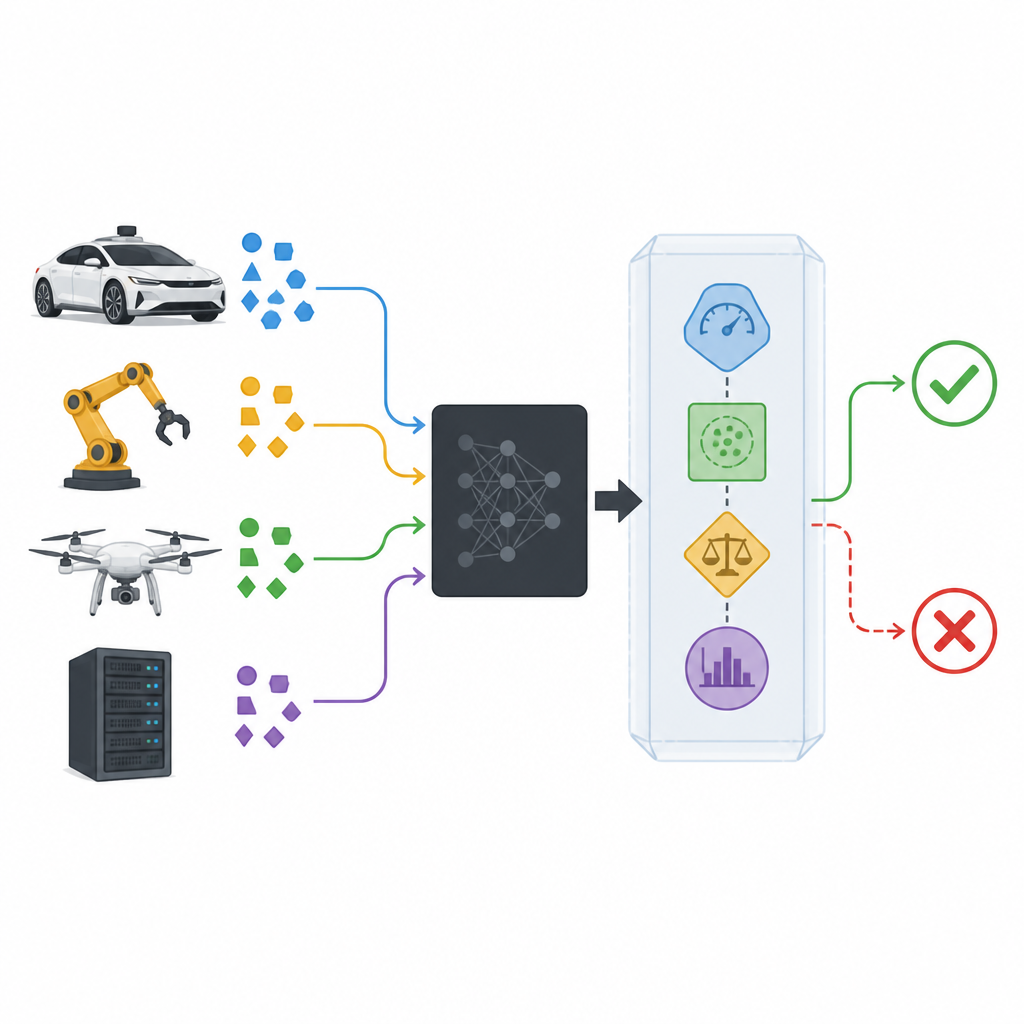
Moderna klassificerare behandlas ofta som black boxes: de tar emot data och levererar en prediktion, medan deras inre arbete förblir dolt eller för komplext att inspektera. Det föreslagna säkerhetslagret, kallat SPROUT, lägger sig runt en sådan black box utan att behöva kika in. Det övervakar varje ny indata, sannolikheterna som klassificeraren tilldelar möjliga klasser och hur den här indatan jämför sig med tidigare data. Utifrån denna information avgör SPROUT om en prediktion verkar tillräckligt pålitlig för att skickas vidare, eller om den bör avvisas som misstänkt. Huvudpoängen är att nästan vilken befintlig klassificerare som helst, för bilder eller tabeller med siffror, binär eller flervalsklassning, kan omslutas på detta sätt så länge den kan leverera klass-sannolikheter.
Mäta tvivel på många olika sätt
För att bedöma hur säker en prediktion egentligen är förlitar sig SPROUT inte på en enda signal. Istället kombinerar det flera "osäkerhetsmått" som var och en ser på tvivel ur olika vinklar. Några kollar enkla tecken, som om en klass sannolikt sticker ut eller om sannolikheterna är jämnt fördelade. Andra jämför klassificerarens svar med extra "kontroll"-modeller tränade på samma data, eller med svar på närliggande datapunkter i träningsmängden. Ett annat mått försöker återskapa indatan med ett autoencoder-nätverk och tolkar en dålig rekonstruktion som en ledtråd att den nya datan skiljer sig från allt som setts tidigare. Tillsammans bildar dessa mått en kompakt tabell av siffror som en liten andra-nivå-modell, kallad en avgörare, omvandlar till ett enkelt behåll-eller-avvisa-beslut.

Testning över många datamängder och modeltyper
Författarna genomförde en stor experimentell studie med 35 publikt tillgängliga datamängder, som täcker nätverksattacker, biometrisk förfalskning, hårdvarufel, Internet of Things-sensorer och flera populära bilddatamängder. De testade mer än 20 typer av klassificerare, både övervakade och oövervakade, och byggde separata SPROUT-upplägg för tabulära data och bilder. I varje fall mätte de hur ofta den ursprungliga klassificeraren hade fel och hur ofta SPROUT lyckades avvisa dessa felaktiga svar innan de kunde slinka igenom. För många övervakade uppgifter, inklusive vissa bildproblem, minskade SPROUT den återstående felprocenten dramatiskt. I vissa fall, såsom en logistisk regressionsmodell på en nätverkssäkerhetsdatamängd, avvisade den varje enskild felklassificering, vilket förvandlade en ibland opålitlig komponent till en vars utdata kunde litas på när de inte avvisades.
Balans mellan säkerhet, tillgänglighet och kostnad
Naturligtvis innebär att fånga fler misstag ofta att fler korrekta svar också avvisas, och att beräkna många osäkerhetsmått tillför tid- och resurskostnader. Studien visar att SPROUT typiskt gör övervakade klassificerare ungefär fyra till fem gånger långsammare och att vissa mått är dyrare än andra. Detta antyder en designavvägning: säkerhetskritiska system kan acceptera extra fördröjning och fler avvisningar för att undvika skadliga utfall, medan tidskritiska eller resursbegränsade tillämpningar kan välja en mindre uppsättning billiga kontroller. Författarna identifierar också vilka mått som spelar störst roll i praktiken och ger vägledning om hur man bygger lättare versioner vid behov.
Vad detta betyder för säkrare AI i praktiken
Enkelt uttryckt är artikelns huvudbudskap att vi bör sluta förvänta oss felfria maskinbeslut och istället kräva att våra system vet när de kan ha fel. SPROUT erbjuder en praktisk mall för att omsluta befintliga black-box-klassificerare med ett tvivlande medvetet skydd som avvisar misstänkta utdata innan de orsakar skada. Även om detta skydd medför extra beräkning och ibland förlust av giltiga prediktioner visar resultaten att det kan kraftigt minska risken att ett farligt misstag passerar obemärkt, vilket gör AI-baserat beslutsfattande mer pålitligt i verkliga tillämpningar.
Citering: Khokhar, F.A., Zoppi, T., Cennini, L. et al. Design, framework and benchmark of safety monitors for black-box classifiers. Sci Rep 16, 15626 (2026). https://doi.org/10.1038/s41598-026-45091-2
Nyckelord: AI-säkerhet, osäkerhet, pålitlig AI, övervakare för maskininlärning, SPROUT-ramverk