Clear Sky Science · sv
Flerdimensionell attention-transformer för fordons- och gångtrafikantdetektion i ogynnsamt väder
Varför det är viktigt att se genom dåligt väder
Moderna bilar och stadskameror lär sig att ”se” vägen åt oss, upptäcka fordon och fotgängare så snabbt att de kan bidra till att undvika olyckor. Men regn, dimma och mörker förvirrar fortfarande många av dessa system och döljer människor och bilar just när säkerheten är som viktigast. Denna artikel introducerar MDAT‑YOLO, en ny datorseendemodell utformad för att fortsätta upptäcka vägtrafikanter snabbt och pålitligt även i tät dimma, kraftigt regn och svagt ljus.

Utmaningen med att köra i verkliga världen
Under åratal har forskare förbättrat automatisk objektdetektion med kraftfulla djupinlärningsmodeller som YOLO, som skannar bilder och markerar bilar, bussar, cyklar och människor i realtid. De flesta av dessa modeller är dock tränade och finjusterade under klara dagsljusförhållanden. När sikten blir sämre—på natten, i dimma eller vid kraftigt regn—blir objekt svaga, suddiga eller delvis dolda. Små eller avlägsna trafikanter är särskilt lätta att missa. Befintliga metoder specialiserar sig ofta på en viss typ av dåligt väder, eller så kopplar de ihop flera tunga nätverk som blir för långsamma och komplexa för realtidstillämpningar i fordon och övervakning.
En smartare metod för att fokusera på det som är viktigt
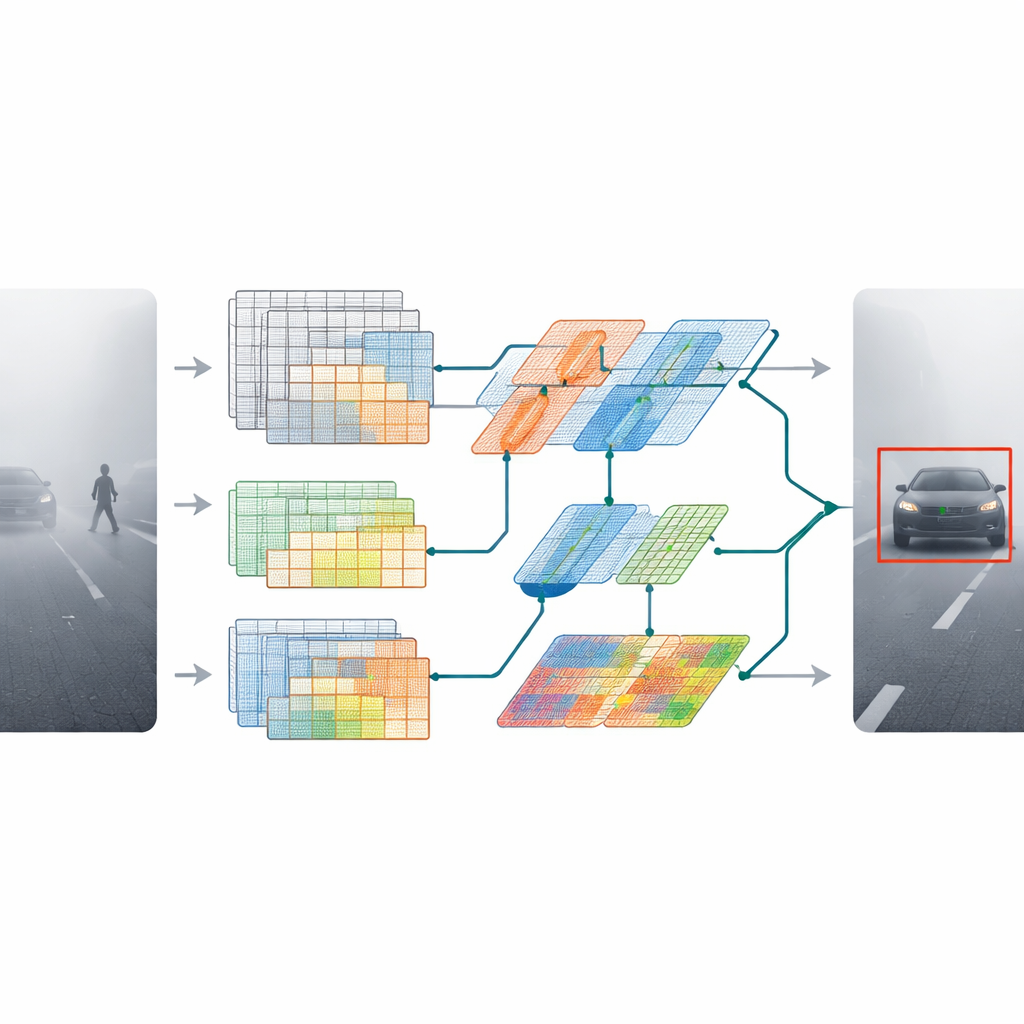
MDAT‑YOLO utgår från en kompakt version av en populär detektor och omformar dess inre byggstenar så att den kan anpassa sig till svåra scener istället för att behandla varje bild på samma stela sätt. Den centrala idén är att låta modellen avgöra, i farten, var den ska rikta sin uppmärksamhet i en bild och hur den ska bearbeta olika typer av visuella mönster. Två nya komponenter driver detta beteende. Ett optimerat depthwise‑convolution‑lager omformar hur information flödar mellan färgkanalerna, vilket gör nätverket lättare men mer uttrycksfullt. En andra modul, kallad omni‑dimensionell dynamisk konvolution, anpassar sina filter inte bara över rummet utan också över olika feature‑kanaler och alternativa filteruppsättningar. Tillsammans låter de modellen reagera olika på tät dimma, kraftigt bländande ljus eller brusiga regnskurar utan att sakta ner.
Lägga till global kontext utan att sakta ner
Utöver att skärpa lokala detaljer ger författarna modellen en bättre förståelse för hela scenen. De introducerar ett lättvikts transformer‑block—vanligt i språkmodeller—som lär sig långdistansrelationer i bilden. Istället för att applicera en stor, kostsam transformer överallt väver de in en slimmad version i nyckelsteg i nätverket. Detta hjälper detektorn att förstå att en svag kontur långt bort sannolikt är en bil på vägen och inte slumpmässigt brus, och att små pixelkluster kan tillhöra en fotgängare som delvis döljs av dimma eller regn.
Testa modellen i tufft väder
För att avgöra om dessa designändringar verkligen hjälper testade forskarna MDAT‑YOLO på flera krävande bildsamlingar. Dessa inkluderar en verklig värld‑sats med dimma, dis och regn; en låg‑ljus nattuppsättning; en nyskapad dimmig version av en välkänd benchmark; och en verklig regnscen‑uppsättning. Över alla dessa upptäckte den nya modellen bilar, bussar, motorcyklar, cyklar och människor mer exakt än många nyare YOLO‑varianter och andra avancerade metoder. Den var särskilt bra på att hitta fordon i tät dimma och personer i mörka scener. Lika viktigt höll modellen realtidsprestanda och bearbetade upp till ungefär 145 bilder per sekund på modern hårdvara—tillräckligt snabbt för användning i rörliga fordon och live trafikövervakning.
Vad detta betyder för vardaglig säkerhet
Enkelt uttryckt är MDAT‑YOLO ett steg mot kameror och omborddatorer som fungerar pålitligt när vädret blir dåligt. Genom att kombinera effektiva byggstenar med flexibel uppmärksamhet och global kontext ”tittar” systemet noggrannare på svaga, små eller delvis dolda objekt utan att bli klumpigt eller långsamt. Även om fler tester på bredare, helt verkliga data fortfarande behövs, tyder resultaten på att framtida förarassistanssystem, självkörande bilar och vägkameror kan missa färre trafikanter i dimma, regn och mörker—vilket hjälper till att göra gatorna säkrare även under de värsta dagarna.
Citering: Biswas, S., Kumar, J., Mitra, A. et al. Multi-dimensional attention transformer for vehicle and pedestrian detection in adverse weather. Sci Rep 16, 12624 (2026). https://doi.org/10.1038/s41598-026-40319-7
Nyckelord: självkörande fordon, objektdetektion, ogynnsamt väder, datorseende, trafiksäkerhet