Clear Sky Science · ar
محول الانتباه متعدد الأبعاد لاكتشاف المركبات والمشاة في الطقس القاسي
لماذا يُهم رؤية الطريق في الطقس السيئ
تتعلم السيارات الحديثة وكاميرات المدينة "الرؤية" للطريق عنا، فتتعرف على المركبات والمشاة بسرعة كافية لمساعدة أنظمة السلامة على تجنّب الحوادث. لكن المطر والضباب والظلام لا تزال تربك العديد من هذه الأنظمة، وتخفي الأشخاص والمركبات تحديدًا حينما تكون الحاجة إلى الأمان أكبر. تُقدّم هذه الورقة نموذج MDAT‑YOLO، نموذجًا جديدًا في رؤية الحاسوب مصممًا للحفاظ على اكتشاف مستخدمي الطريق بسرعة وموثوقية حتى في الضباب الكثيف، والمطر الغزير، والضوء الخافت.

تحدي القيادة في العالم الحقيقي
لسنوات، حسّن الباحثون اكتشاف الأجسام التلقائي باستخدام نماذج التعلم العميق القوية مثل YOLO، التي تمسح الصور وتحدد السيارات والحافلات والدراجات والأشخاص في الزمن الحقيقي. ومع ذلك، تم تدريب معظم هذه النماذج وضبطها في ظروف نهارية وصافية. عندما تقل الرؤية—ليلًا، أو في الضباب، أو أثناء عاصفة مطرية—تصبح الأشياء باهتة أو ضبابية أو مخفية جزئيًا. من السهل بشكل خاص فقدان المستخدمين الصغار أو البعيدين عن الطريق. الحلول الحالية غالبًا ما تتخصص في نوع واحد من الطقس السيء، أو تربط بين شبكات كبيرة متعددة تكون بطيئة ومعقدة جدًا للاستخدام في القيادة والمراقبة في الزمن الحقيقي.
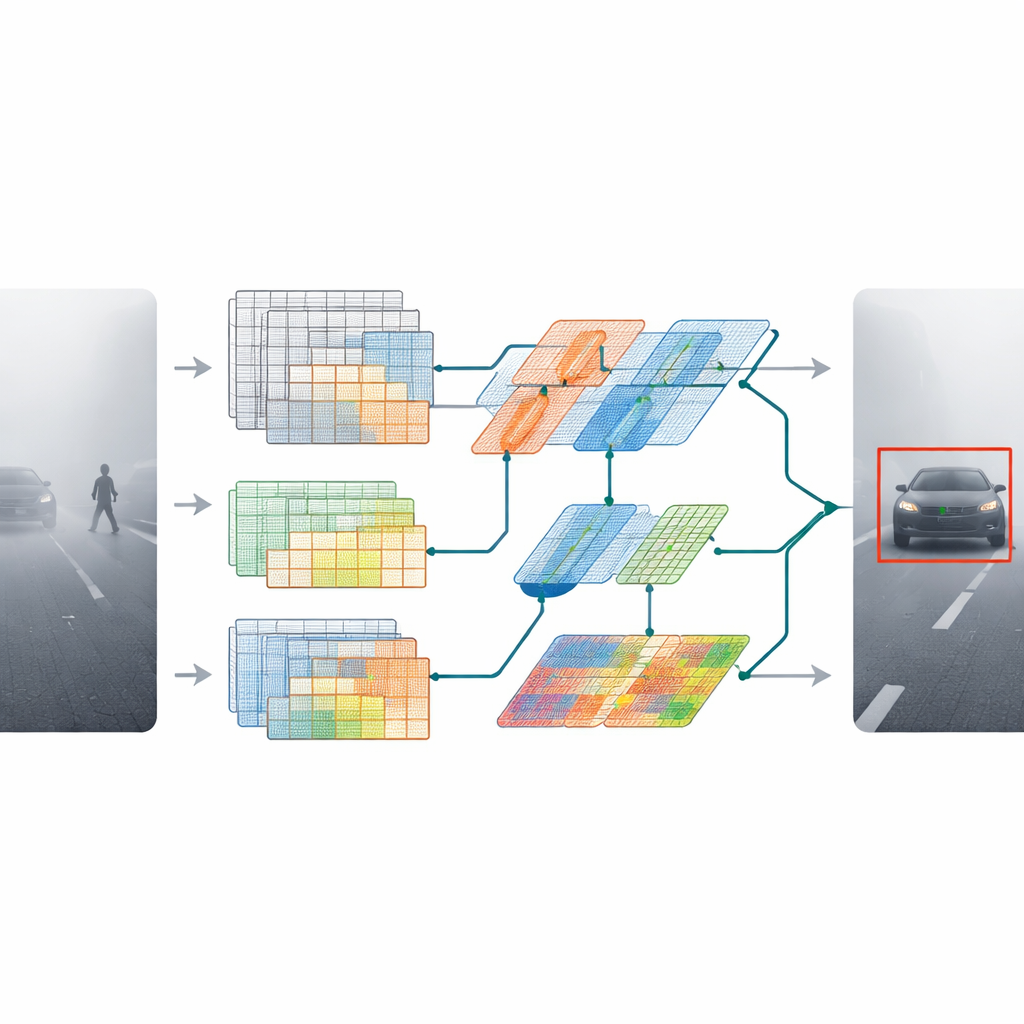
طريقة أذكى للتركيز على ما يهم
ينطلق MDAT‑YOLO من نسخة مدمجة من كاشف شائع ويعيد تصميم وحداته الداخلية بحيث يمكنه التكيّف مع المشاهد الصعبة بدلًا من معاملة كل صورة بنفس الطريقة الجامدة. الفكرة الأساسية هي السماح للنموذج بأن يقرر فورًا أين يركّز انتباهه داخل الصورة وكيفية معالجة أنماط بصرية مختلفة. مكوّنان جديدان يدفعان هذا السلوك. طبقة تلافيف عمودية مُحسّنة تعيد تشكيل تدفّق المعلومات بين قنوات الألوان، ما يجعل الشبكة أخف وأكثر تعبيرًا. والمكوّن الثاني، المسمى التلافيف الديناميكية شاملة الأبعاد، يضبط مرشِّحاته ليس فقط عبر الفضاء بل عبر قنوات الميزات ومجموعات مرشحات بديلة أيضًا. معًا، تتيح هذه العناصر للنموذج الاستجابة بشكل مختلف للضباب الكثيف أو الوهج الشديد أو شرائط المطر المزعجة دون إبطاء الأداء.
إضافة سياق عام دون إبطاء السرعة
بعيدًا عن تشديد التفاصيل المحلية، يزوّد المؤلفون النموذج بفهم أفضل للمشهد ككل. يقدمون كتلة محول خفيفة الوزن—المستخدمة عادة في نماذج اللغة—التي تتعلم العلاقات طويلة المدى داخل الصورة. بدلًا من تطبيق محول كبير ومكلف في كل مكان، يدمجون نسخة مصغرة في مراحل رئيسية من الشبكة. يساعد ذلك الكاشف على تفسير أن ظلًا خافتًا في المسافة من المرجح أن يكون سيارة على الطريق لا مجرد ضوضاء عشوائية، وأن مجموعات صغيرة من البكسلات قد تنتمي إلى مشاة مخفيين جزئيًا بالضباب أو المطر.
اختبار النموذج في الطقس القاسي
لتقييم ما إذا كانت تغييرات التصميم هذه مفيدة بالفعل، اختبر الباحثون MDAT‑YOLO على مجموعات صور متعددة ومتطلبة. وتشمل هذه مجموعة من المشاهد الواقعية للضباب والضباب الخفيف والمطر؛ ومجموعة ليل منخفض الإضاءة؛ وإصدار ضبابي جديد من معيار معروف؛ ومجموعة مشاهد ممطرة حقيقية. عبر جميع هذه المجموعات، اكتشف النموذج الجديد السيارات والحافلات والدراجات النارية والدراجات والأشخاص بدقة أعلى من العديد من متغيرات YOLO الحديثة وطرق متقدمة أخرى. كان قويًا بشكل خاص في العثور على المركبات في الضباب الكثيف والأشخاص في المشاهد المظلمة. والأهم من ذلك، حافظ النموذج على سرعات الزمن الحقيقي، مع معالجة تصل إلى نحو 145 صورة في الثانية على أجهزة حديثة—سريعة بما يكفي للاستخدام في المركبات المتحركة ومراقبة المرور الحية.
ماذا يعني هذا للسلامة اليومية
بعبارات بسيطة، يعد MDAT‑YOLO خطوة نحو كاميرات وأجهزة كمبيوتر متنقلة تواصل العمل بشكل موثوق عندما يتقلب الطقس. من خلال الجمع بين وحدات فعّالة والانتباه المرن والسياق العام، "ينظر" النظام بتمعّن أكبر إلى الأشياء الخافتة أو الصغيرة أو المخفية جزئيًا دون أن يصبح ضخمًا أو بطيئًا. وبينما لا تزال هناك حاجة لاختبارات أوسع على بيانات أكثر تمثيلًا للواقع الكامل، تشير النتائج إلى أن أنظمة مساعدة السائق المستقبلية، والسيارات الذاتية، وكاميرات الطرق يمكن أن تفقد عددًا أقل من مستخدمي الطريق في الضباب والمطر والظلام—مما يساهم في جعل الشوارع أكثر أمانًا حتى في أسوأ الأيام.
الاستشهاد: Biswas, S., Kumar, J., Mitra, A. et al. Multi-dimensional attention transformer for vehicle and pedestrian detection in adverse weather. Sci Rep 16, 12624 (2026). https://doi.org/10.1038/s41598-026-40319-7
الكلمات المفتاحية: القيادة الذاتية, كشف الأشياء, الطقس القاسي, رؤية الحاسوب, سلامة المرور