Clear Sky Science · sv
Biomimetiskt hårigt affektiv-berörings-sensoriskt AI-gränssnitt
Varför det är viktigt att lära maskiner att känna
Vi avgör ofta hur någon känner sig utifrån hur de rör vid oss: en hastig klapp, en spänd knuff, en långsam tröstande strykning. Dagens robotar och smarta enheter kan se och höra, men de missar till stor del denna rika emotionella kanal. Denna artikel presenterar en ny typ av mjuk, hårig elektronisk hud som låter maskiner känna inte bara att de blir berörda, utan också hur beröringen känns emotionellt, vilket öppnar för mjukare och mer naturliga interaktioner mellan människor och AI.
En ny sorts konstgjord hårig hud
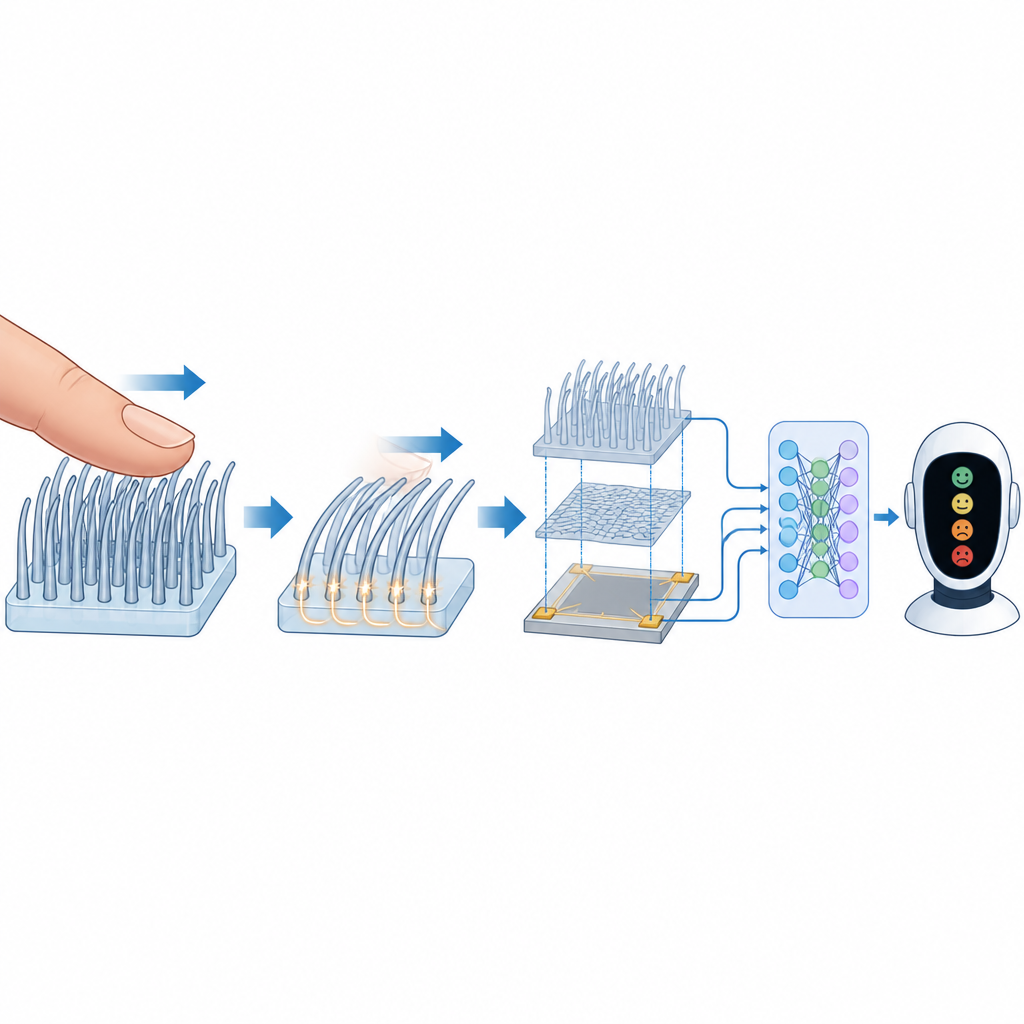
Forskarna skapade en flexibel sensor, kallad BioAI2, som imiterar de fina håren på däggdjurs hud. Hos djur känner små nervändar runt hårsäckar av lätta strykningar och skickar signaler kopplade till välbehag och social bindning. BioAI2 kopierar denna idé med en bädd av mjuka silikonhår placerade ovanpå ett tunt, mycket enhetligt ledande nät. När ett finger sveper över håren böjer de sig och återvänder, vilket skapar korta elektriska pulser utan batterier eller extern ström. Dessa pulser bär information om var beröringen sker, hur hårt den är och hur snabbt den rör sig, på samma sätt som signalerna från våra egna känsliga nervfibrer.
Från mjuka strykningar till hjärnliknande signaler
Under ytan förlitar sig enheten på en enkel fysikalisk effekt: när två olika material vidrör och separeras flyttar sig små laddningar mellan dem. Mänsklig hud och silikonhåren utbyter laddning när fingret glider, och det underliggande nätet fångar upp dessa förändringar som ett tåg av skarpa spikar. Genom att noggrant utforma hår i två olika höjder och avstånd gjorde teamet sensorn särskilt känslig för lätta krafter samtidigt som den klarar av starkare tryck. De fann att frekvensen av elektriska spikar ökar med strykningshastigheten upp till en optimal punkt och sedan sjunker igen, vilket matchar hur vissa mänskliga beröringsnerver svarar bäst på smek-liknande hastigheter. Det gör utsignalen inte bara teknisk utan också en direkt motsvarighet till hur våra kroppar kodar behaglig beröring.
Se kraft, plats och rörelse samtidigt
Till skillnad från många tidigare beröringssensorer som bara mäter tryck vid fasta punkter läser BioAI2 flera aspekter av beröring från ett enda tunt ark. Fyra elektroder i hörnen samlar pulser vars styrka och tidsförlopp varierar med var fingret landar och hur det rör sig. Forskarna utvecklade en matematisk avbildningsmetod baserad på jämna "isolinje"-kurvor så att även beröringar nära kanterna kan lokaliseras mycket noggrant över ett stort område. Den taggiga hårdesignen gör också att varje puls blir extremt kort i tid, vilket tillåter systemet att separera överlappande beröringar från flera fingrar och rekonstruera komplexa banor, såsom bokstäver eller former ritade på ytan.
Lära maskiner att läsa känslor i beröring
För att koppla dessa mönster till mänskliga känslor såg frivilliga filmklipp som var avsedda att framkalla positiva, neutrala eller negativa sinnesstämningar, och utförde sedan vardagliga gester som strykningar, knackningar och slag på den håriga ytan. Enheten fångade tusentals exempel, och teamet omvandlade de råa signalerna till färgrika tids-frekvensbilder, med tillägg av indikatorer för strykningshastighet och kraft. Ett djupinlärningssystem lärde sig att känna igen både gesttypen och den troliga emotionella tonen bakom den. För olika personer identifierade det gesten nästan alltid korrekt och klassade det emotionella tillståndet med över 80 procents noggrannhet, vilket visar att känslomässiga ledtrådar i beröring kan avkodas från denna artificiella hud.
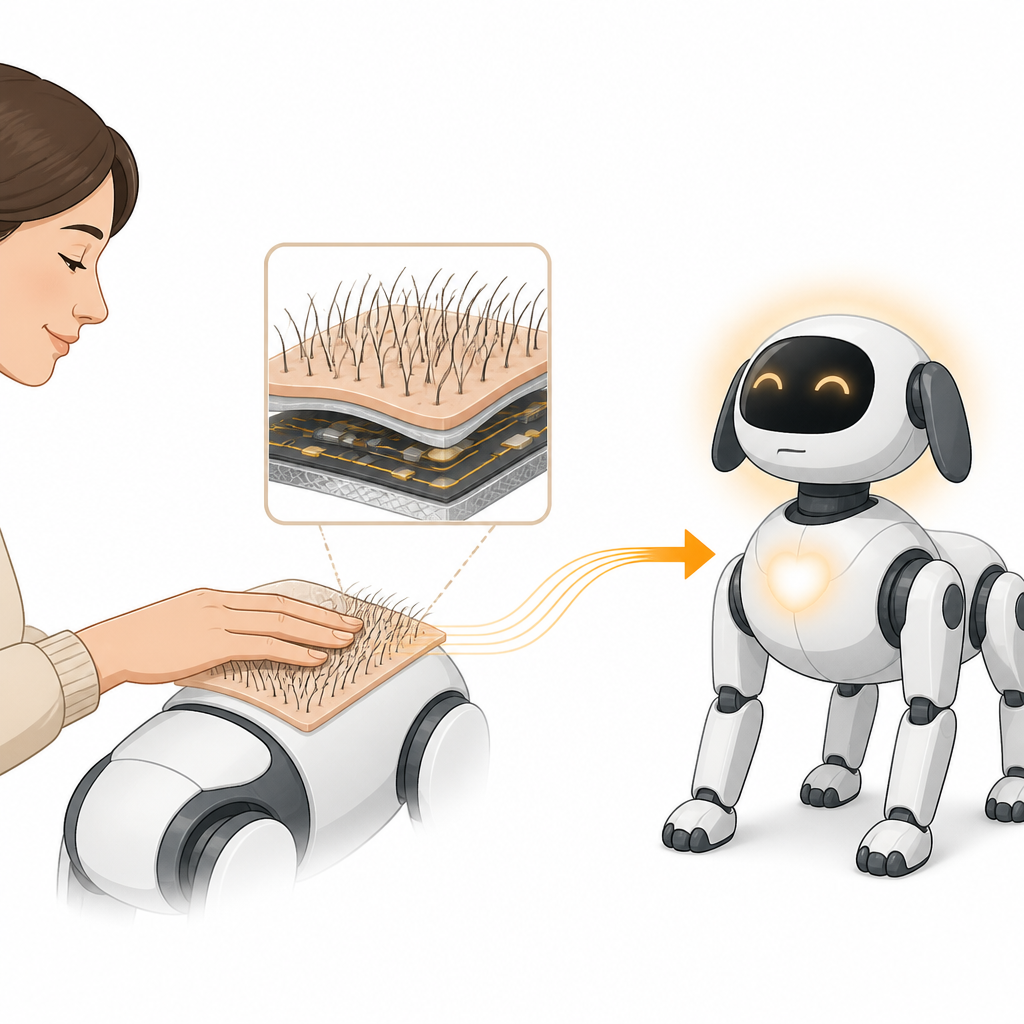
Stänga den emotionella loopen med robotar
Slutligen kombinerade forskarna den håriga huden med en robothund och en stor språkmodell liknande moderna chattbotar. Huden kände hur ägaren strök roboten medan språkmodellen fick extra kontext som situationen och relationen mellan människa och robot. Tillsammans valde de lämpliga uttryckliga handlingar, som att hoppa, vila eller snudda, för att matcha den upptäckta sinnesstämningen. Detta skapar en fullständig loop: en person uttrycker känsla genom beröring, maskinen tolkar både beröringen och kontexten och svarar sedan på ett sätt som känns känslomässigt passande.
Vad det betyder för framtida människa-maskin-relationer
Detta arbete visar att en tunn, mjuk, hårtäckt elektronisk hud kan omvandla subtila beröringsmönster till signaler som maskiner kan använda för att förstå våra känslor. Genom att kombinera denna sensor med modern AI kan robotar och enheter gå bortom stelstyrda knapptryckningar mot interaktioner som liknar trösten i att klappa ett djur eller hålla en hand. Även om systemet fortfarande behöver större ytor, mer data och andra sinnen som temperatur för att fullt ut matcha mänsklig beröring, pekar det mot en framtid där tekniken kan reagera på vårt emotionella tillstånd genom beröring och göra digitala följeslagare, assistansrobotar och terapeutiska verktyg mer människomedvetna och stödjande.
Citering: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
Nyckelord: affektiv beröring, elektronisk hud, människa-robot-interaktion, taktil sensing, känsloigenkänning