Clear Sky Science · ja
生体模倣の毛状情動タッチ感知AIインターフェース
機械にタッチを教えることが重要な理由
私たちはしばしば、相手の気分を触り方から判断します:軽いポンとした触れ方、緊張した押し、ゆっくりとした安心させるようななで方。今日のロボットやスマート機器は視覚や聴覚を持っていますが、この豊かな感情チャネルはほとんど備えていません。本論文は、機械が「触れられている」ことだけでなく、その触れ方が感情的にどう感じられるかを感知できる新しいタイプの柔らかい毛状電子皮膚を示し、人とAIのより穏やかで自然な相互作用への扉を開きます。
新しい種類の人工毛皮
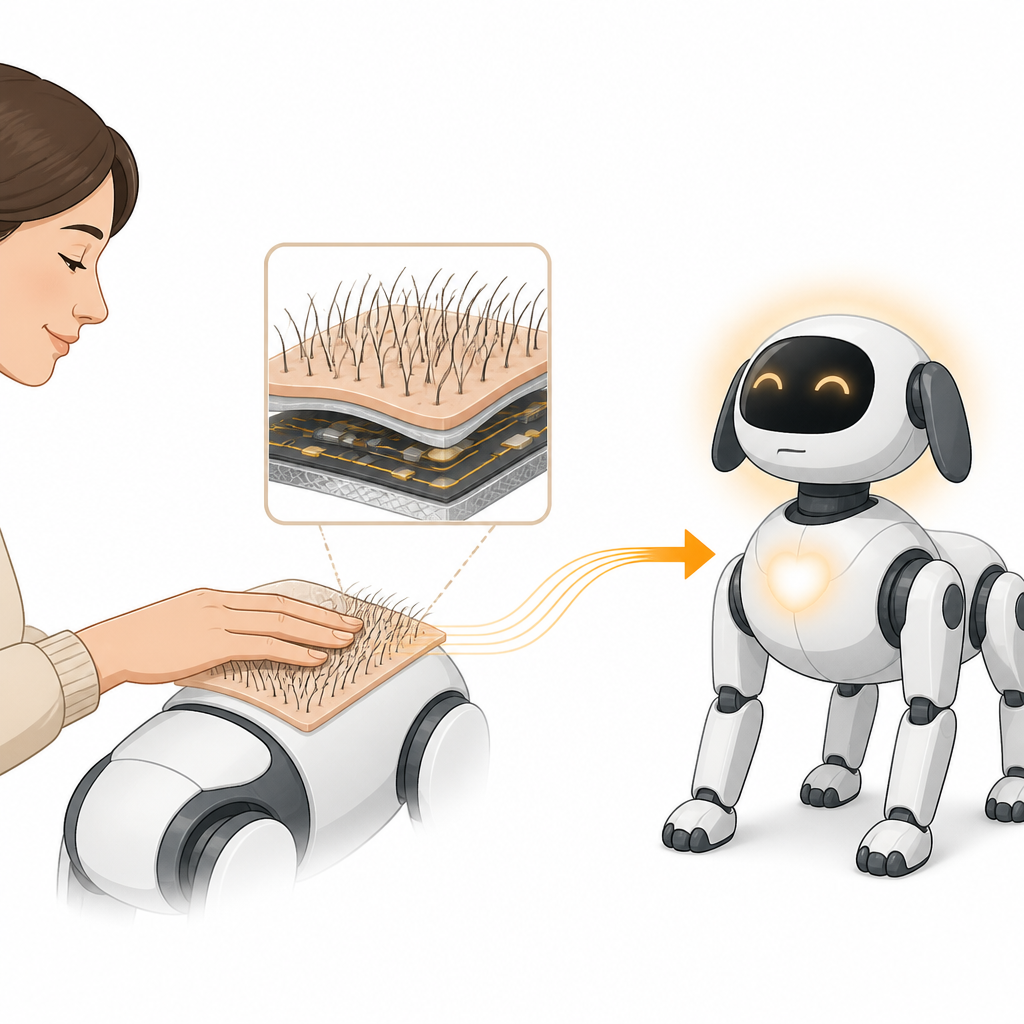
研究者らは、BioAI2と呼ばれる柔軟なセンサーを作りました。これは哺乳類の皮膚にある細かい毛を模しています。動物では、毛の根元を取り巻く小さな神経終末が軽いなで動作を検出し、快適さや社会的結びつきに関連する信号を送ります。BioAI2はこの考えを、薄く非常に均一な導電メッシュの上に並んだ柔らかいシリコーン製の毛の層で再現します。指が毛を横切ると毛が曲がって跳ね返り、バッテリーや外部電源なしで短い電気パルスが発生します。これらのパルスは、触れた場所、強さ、速度に関する情報を運び、私たちの触覚神経線維からの信号に似た働きをします。
優しいなで動作から脳のような信号へ
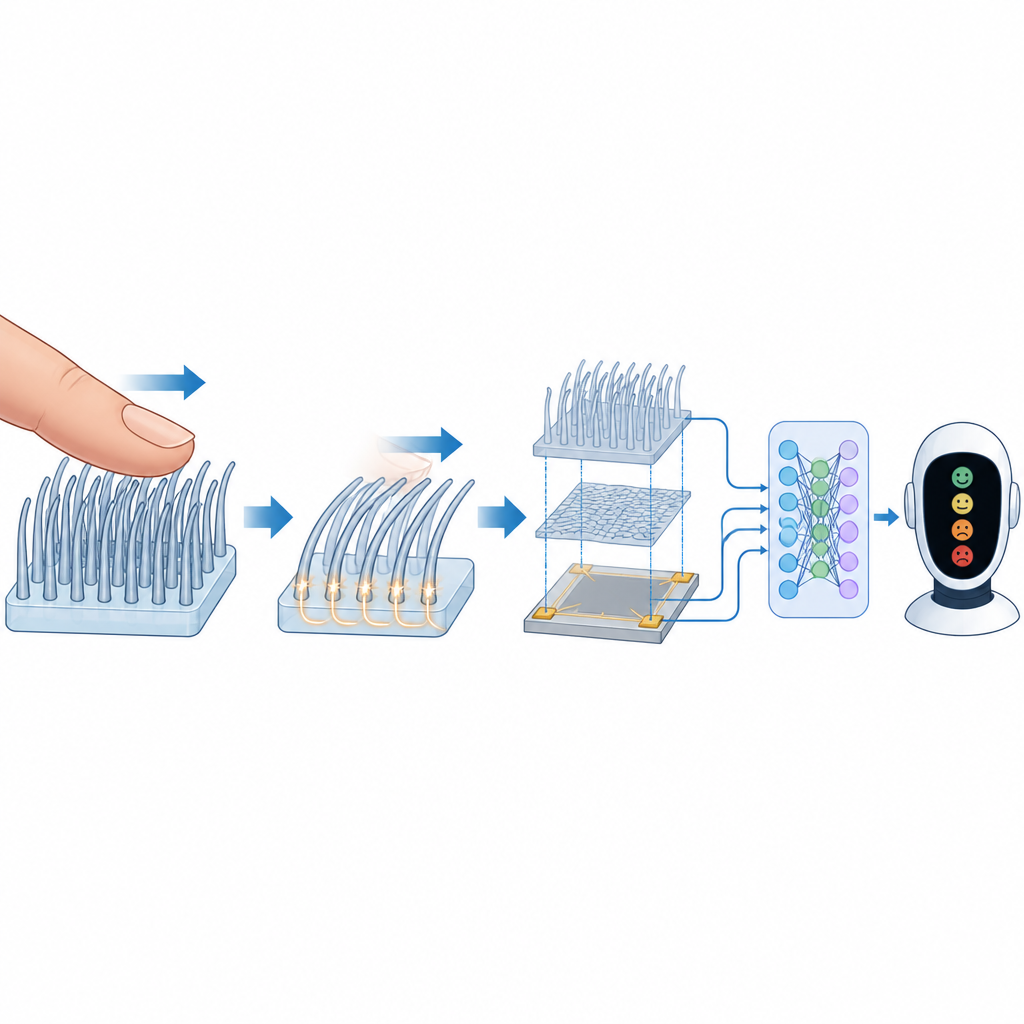
デバイスの内部では、単純な物理効果に依存しています:異なる素材が接触して離れるときに微小な電荷が移動するという現象です。人間の皮膚とシリコーンの毛は指が滑るときに電荷をやり取りし、下層のメッシュはそれらの変化を鋭いスパイクの列として集めます。高さと間隔の異なる二種類の毛を慎重に設計することで、チームは軽い力に特に敏感でありながら、強い押しにも耐えうるセンサーを作りました。電気スパイクの発生率はストロークの速度に応じて高まり、ある最適な速度を越えると再び下がることが分かり、これは特定の人間の触覚神経が心地よい撫で動作の速度に最もよく応答する様子に一致します。これにより出力は単なる技術的信号ではなく、身体が快適な触れ方を符号化する方法を直接的に代替するものになります。
力、位置、動きを同時に可視化する
固定点で圧力だけを測る従来の多くの触覚センサーと異なり、BioAI2は単一の薄いシートからタッチの複数の側面を読み取ります。角に配置された四つの電極が、指が当たる位置や動きに応じて強度とタイミングの異なるパルスを集めます。研究者らは滑らかな「等値線」曲線に基づく数学的マッピング手法を開発し、端近くのタッチであっても広い領域で非常に正確に位置を特定できるようにしました。毛状デザインにより各パルスの時間幅が非常に短くなるため、複数の指による重なったタッチを分離し、表面上に描かれた文字や形のような複雑な経路を復元できます。
タッチから感情を読み取る機械を教える
これらのパターンを人間の感情に結びつけるために、被験者はポジティブ、中立、ネガティブな気分を誘導する映画クリップを見た後、毛のある表面に対してなでる、ノックする、平手打ちするなどの日常的なジェスチャーを行いました。デバイスは数千のサンプルを記録し、チームは生の信号をカラフルな時間周波数画像に変換して、ストローク速度や力の指標を付加しました。深層学習システムはジェスチャーの種類とそれに伴う感情トーンの両方を学習しました。異なる人々の間でも、ジェスチャーはほぼ常に正しく識別され、感情状態は80%を超える精度でラベル付けされ、触覚に含まれる感情の手がかりがこの人工皮膚から解読できることを示しました。
ロボットとともに感情のループを閉じる
最後に、研究者らは毛状皮膚をロボット犬と現代的なチャットボットに似た大規模言語モデルと組み合わせました。皮膚は所有者がロボットをどう撫でているかを感知し、言語モデルは状況や人とロボットの関係といった追加の文脈情報を受け取りました。両者は連携して、ジャンプ、休む、すり寄るなど検出された気分に合った表現動作を選択しました。これにより完全なループが形成されます:人が触れによって感情を表現し、機械が触れと文脈を解釈して、感情にふさわしい形で反応するのです。
将来の人間と機械の関係にとっての意義
この研究は、薄く柔らかい毛覆いの電子皮膚が微妙なタッチのパターンを機械が感情を感じ取り利用できる信号に変換できることを示しています。このセンサーを現代のAIと組み合わせることで、ロボットやデバイスは硬直したボタン操作を超えて、動物を撫でるときや手を握るときに感じるような安心感に似た交流へと近づくことができます。システムはより大きな面積、より多くのデータ、温度などの他の感覚を加えることで人間の触覚に完全に匹敵するにはさらに改良が必要ですが、触れを通じて技術が私たちの感情状態に応答できる未来、つまりデジタルな伴侶、支援ロボット、治療ツールがより人間に配慮し支える存在になる方向性を示しています。
引用: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
キーワード: 情動的タッチ, 電子皮膚, 人間とロボットの相互作用, 触覚センシング, 感情認識