Clear Sky Science · es
Interfaz sensorial afectiva biomimética con vello
Por qué importa enseñar tacto a las máquinas
Solemos intuir cómo se siente alguien por la forma en que nos toca: una palmada rápida, un empujón tenso, una caricia lenta y reconfortante. Los robots y dispositivos actuales pueden ver y oír, pero en gran medida pasan por alto este rico canal emocional. Este artículo presenta un nuevo tipo de piel electrónica suave y vellosa que permite a las máquinas percibir no solo que están siendo tocadas, sino cómo se siente ese toque en términos emocionales, abriendo la puerta a interacciones más delicadas y naturales entre personas e IA.
Un nuevo tipo de piel artificial con vello
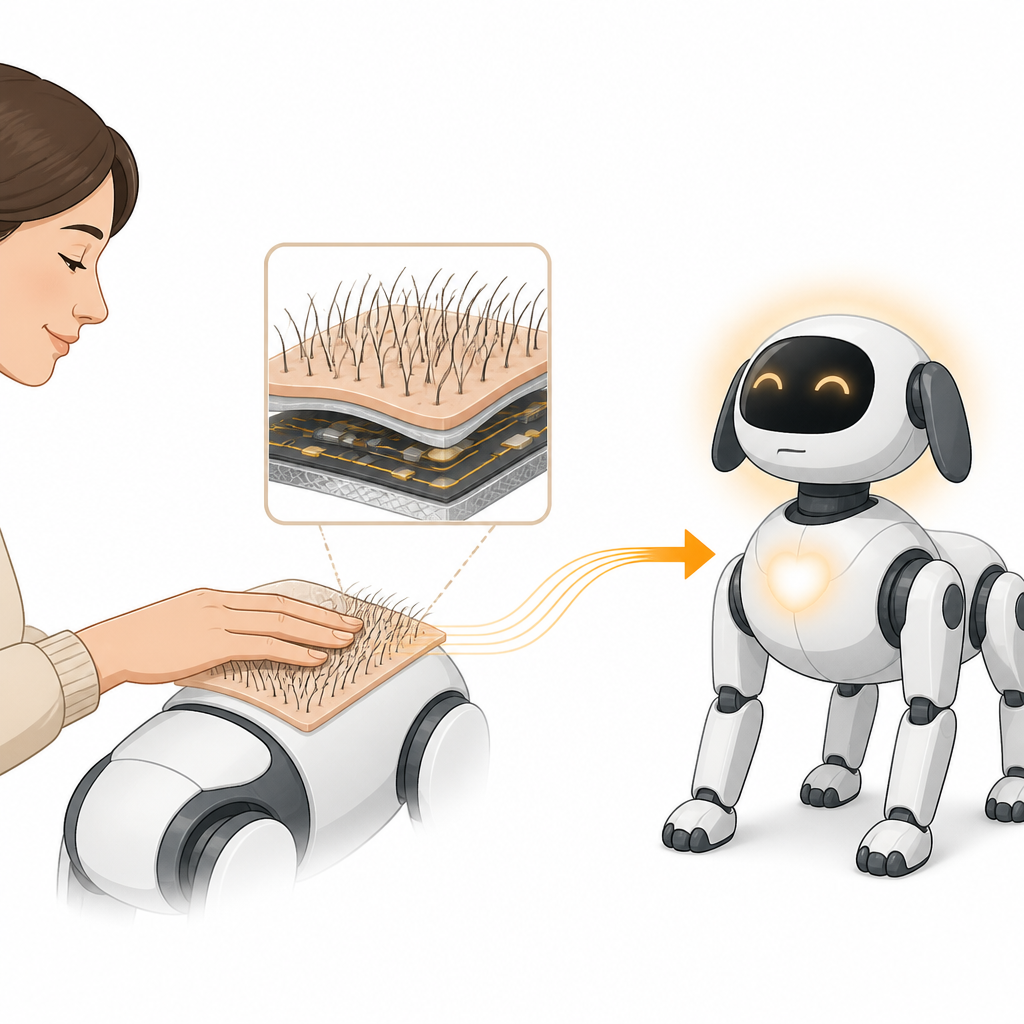
Los investigadores crearon un sensor flexible, llamado BioAI2, que imita los finos pelos de la piel de los mamíferos. En los animales, pequeñas terminaciones nerviosas alrededor de las raíces del pelo detectan caricias ligeras y envían señales vinculadas al confort y al vínculo social. BioAI2 reproduce esta idea con una cama de pelos de silicona suave sobre una malla conductora delgada y muy uniforme. Cuando un dedo roza los pelos, estos se doblan y rebotan, creando pulsos eléctricos breves sin baterías ni alimentación externa. Estos pulsos llevan información sobre dónde ocurre el contacto, cuánta fuerza tiene y qué velocidad lo atraviesa, de forma análoga a las señales de nuestras propias fibras nerviosas sensibles al tacto.
De caricias suaves a señales tipo cerebral
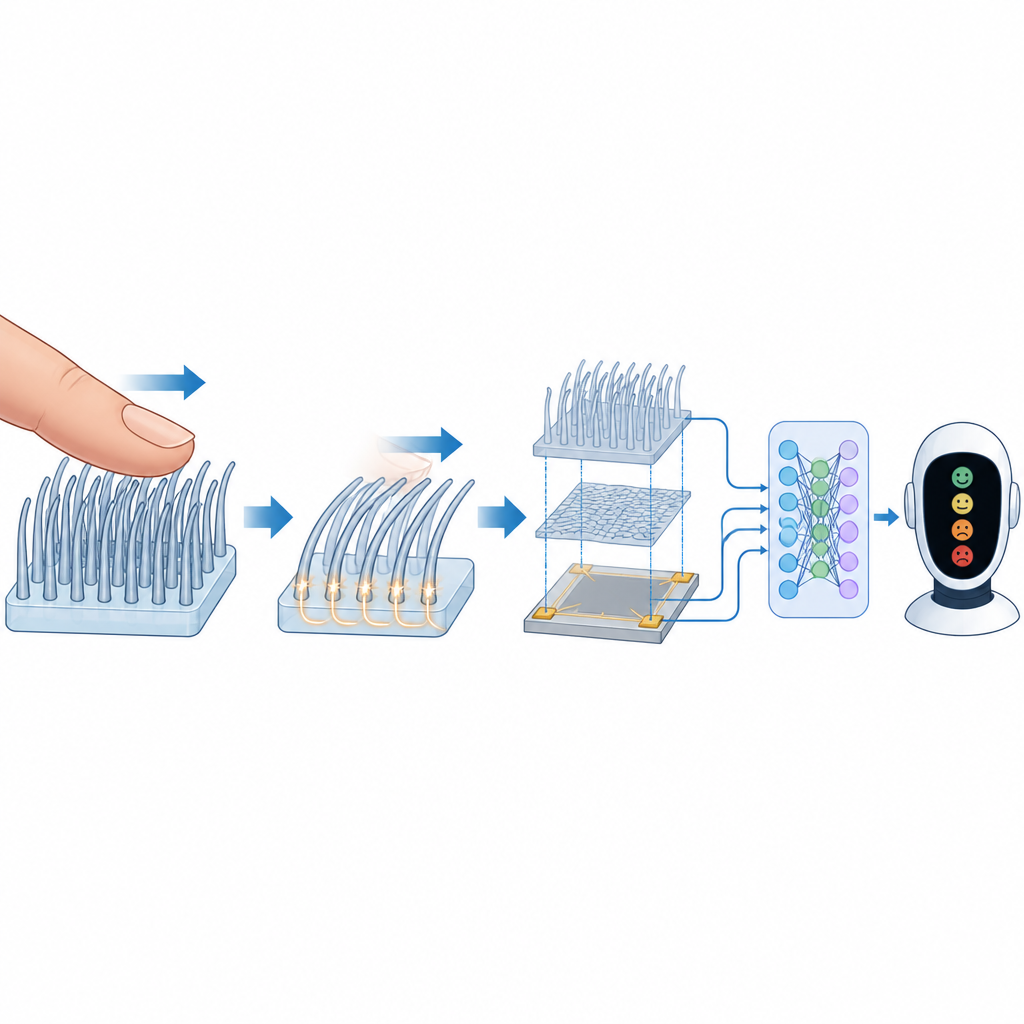
Debajo de la superficie, el dispositivo se basa en un efecto físico simple: cuando dos materiales distintos se tocan y se separan, pequeñas cargas se transfieren entre ellos. La piel humana y los pelos de silicona intercambian carga al deslizar el dedo, y la malla subyacente recoge esos cambios como una serie de picos afilados. Diseñando con cuidado pelos de dos alturas y separaciones, el equipo hizo que el sensor fuera especialmente sensible a fuerzas ligeras, sin dejar de soportar presiones más fuertes. Encontraron que la tasa de picos eléctricos aumenta con la velocidad del deslizamiento hasta un punto óptimo y luego disminuye, coincidiendo con cómo ciertos nervios del tacto humano responden mejor a velocidades propias de una caricia. Esto convierte la salida no solo en una señal técnica, sino en un representante directo de la forma en que nuestros cuerpos codifican el tacto placentero.
Ver fuerza, ubicación y movimiento a la vez
A diferencia de muchos sensores táctiles anteriores que miden solo presión en puntos fijos, BioAI2 extrae varios aspectos del tacto desde una sola lámina delgada. Cuatro electrodos en las esquinas recogen pulsos con intensidades y tiempos que varían según dónde aterriza el dedo y cómo se mueve. Los investigadores desarrollaron un método matemático basado en curvas suaves de "isolinia" para que incluso los toques cerca de los bordes puedan localizarse con gran precisión en una amplia área. El diseño con pelos que generan picos también hace que cada pulso sea extremadamente corto en el tiempo, permitiendo al sistema separar toques superpuestos de varios dedos y reconstruir trayectorias complejas, como letras o figuras dibujadas sobre la superficie.
Enseñar a las máquinas a leer sentimientos a partir del tacto
Para vincular estos patrones con emociones humanas, voluntarios vieron fragmentos de películas diseñadas para inducir estados positivos, neutros o negativos, y luego realizaron gestos cotidianos como caricias, golpecitos y palmadas sobre la superficie vellosa. El dispositivo capturó miles de ejemplos, y el equipo convirtió las señales crudas en imágenes tiempo-frecuencia coloridas, añadiendo indicadores de velocidad y fuerza del gesto. Un sistema de aprendizaje profundo aprendió a reconocer tanto el tipo de gesto como el tono emocional probable detrás de él. Entre distintas personas, identificó correctamente el gesto casi todo el tiempo y etiquetó el estado emocional con más del 80 por ciento de precisión, mostrando que las claves emocionales en el tacto pueden decodificarse desde esta piel artificial.
Cerrando el bucle emocional con robots
Finalmente, los investigadores combinaron la piel vellosa con un perro robot y un gran modelo de lenguaje similar a los chatbots actuales. La piel detectó cómo el dueño acariciaba al robot mientras el modelo de lenguaje recibía contexto adicional, como la situación y la relación entre humano y robot. Juntos, eligieron acciones expresivas apropiadas, como saltar, descansar o rozar el hocico, para coincidir con el estado de ánimo detectado. Esto crea un bucle completo: una persona expresa emoción mediante el tacto, la máquina interpreta tanto el contacto como el contexto y luego responde de una manera que resulta emocionalmente adecuada.
Qué significa esto para las futuras relaciones humano-máquina
Este trabajo muestra que una piel electrónica delgada, suave y cubierta de vello puede convertir patrones sutiles de tacto en señales que las máquinas pueden usar para percibir nuestros sentimientos. Al combinar este sensor con IA moderna, los robots y dispositivos pueden pasar de pulsaciones rígidas a interacciones que se asemejan al consuelo de acariciar un animal o tomar una mano. Aunque el sistema aún necesita superficies más amplias, más datos y otros sentidos como la temperatura para igualar plenamente el tacto humano, apunta hacia un futuro en el que la tecnología pueda responder a nuestro estado emocional mediante el tacto, haciendo que compañeros digitales, robots de asistencia y herramientas terapéuticas se sientan más conscientes y solidarios.
Cita: Hong, J., Xiao, Y., Chen, Y. et al. Biomimetic hairy affective-touch sensory AI interface. Nat Commun 17, 4146 (2026). https://doi.org/10.1038/s41467-026-70334-1
Palabras clave: tacto afectivo, piel electrónica, interacción humano-robot, sensado táctil, reconocimiento de emociones